-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-15
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
摘要 B~�?��*?Z'
48J@C��v�U 微透镜阵列在数字投影仪、光学扩散器、三维成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。 V�ouvr<43o �mbKZJ{|4s  pD�8+� 4;A �bYcV$KJk 微透镜阵列的结构配置 ��{IjF�+@I /R�G:�W0=K pD�8+� 4;A �bYcV$KJk 微透镜阵列的结构配置 ��{IjF�+@I /R�G:�W0=K 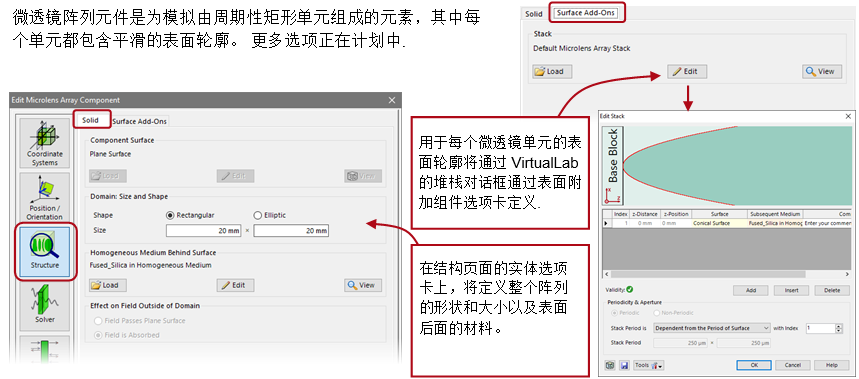 mWv3!i;G<s bpOYHc6,*` mWv3!i;G<s bpOYHc6,*`
场通过哪一种方法通过MLA传播? �����):P?� gL�b`p�Co/
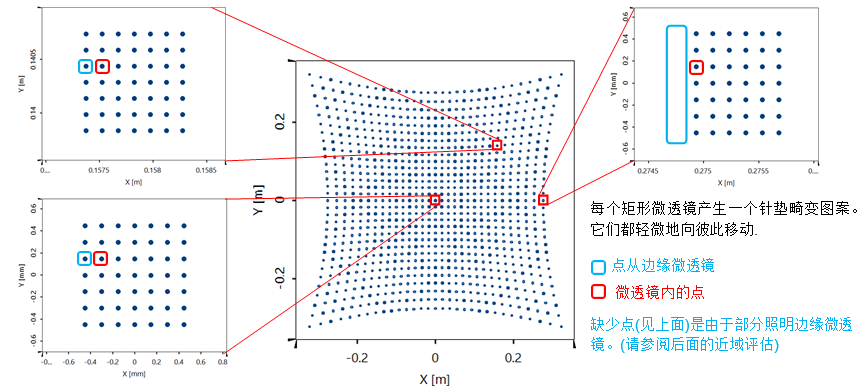
 �kT|�dUw9G ���>�;�jZa 子通道分解 2my_�;!6T[ gx-2v|pZ�� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . [ie�I;OG�; • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 �_Mi5g��_ 例如 微透镜的数量,表面变化的强度, N(O9&L*4fm • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 _aq���8@E~ • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. T*�I{�WW� �kT|�dUw9G ���>�;�jZa 子通道分解 2my_�;!6T[ gx-2v|pZ�� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . [ie�I;OG�; • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 �_Mi5g��_ 例如 微透镜的数量,表面变化的强度, N(O9&L*4fm • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 _aq���8@E~ • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. T*�I{�WW� 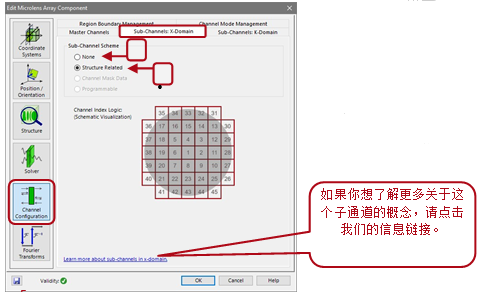 �u/Ur�A�qw �u/Ur�A�qw
/hp�Y f�]t w3N[�9�w?1
�W=�i�g.- y3vdU�auOn 子通道评估 K�>
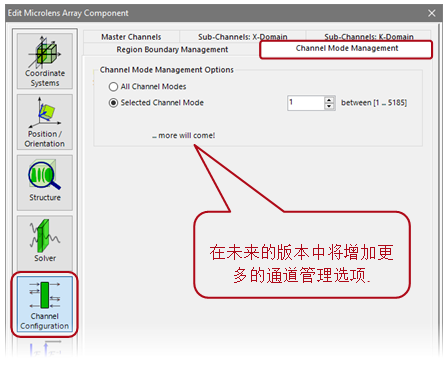
��%Tq� +�<'Ev��~� • VirtualLab Fusion还可以分别评估每个微透镜的结果. "H2E�L}3/] ]��y�V��! • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择. �J�f@H/luW f<GhkDPm>?
 Upx �G@b�� Upx �G@b��
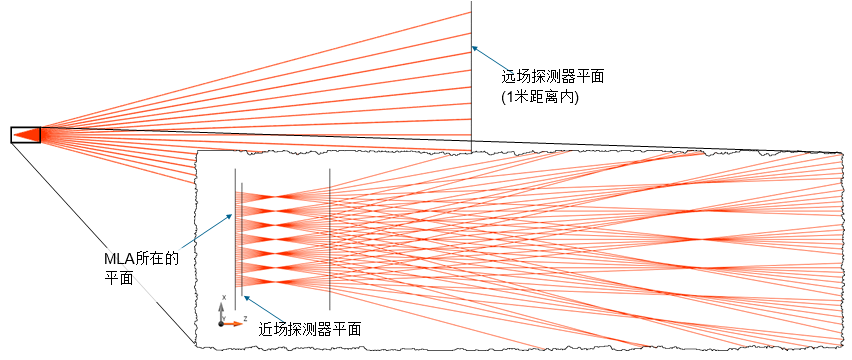
C:GK,?!Jn' 近场评估探测器的定位 cv8L-Z>x.= �%J#YM�'g� 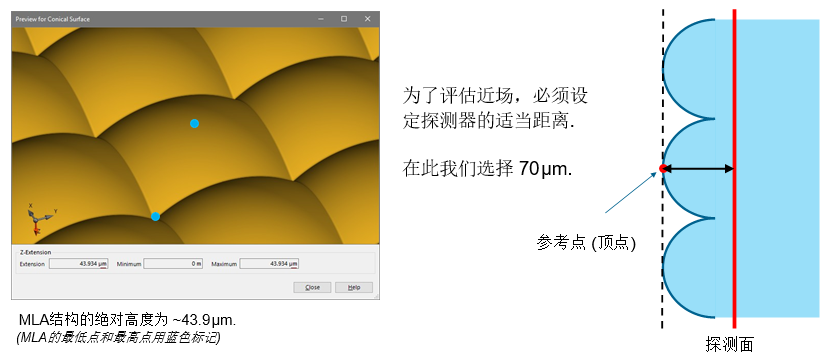 ��2��L�!u1 �sXqz+z�$* 区域边界管理 ;:�iY)���} %]�\�kgRr ��2��L�!u1 �sXqz+z�$* 区域边界管理 ;:�iY)���} %]�\�kgRr 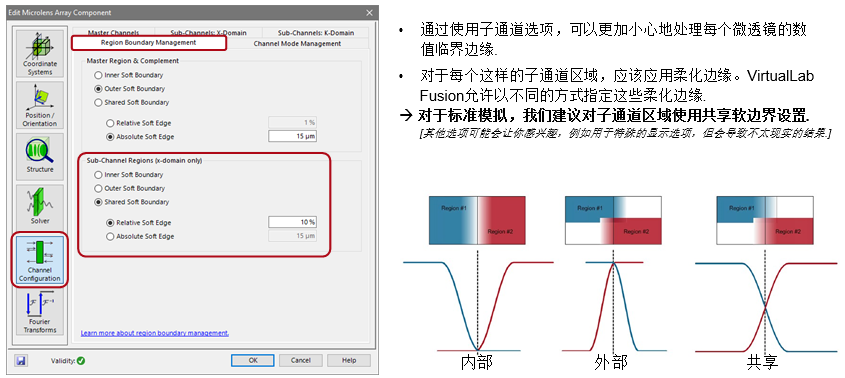 __uA}f�Zp� #OZ�>V3k�� 场景演示 \�S�_�Ou � __uA}f�Zp� #OZ�>V3k�� 场景演示 \�S�_�Ou �
r�r/�B=�O7 演示示例的配置 ��eFipIn)b y@�1+I�~@�
 a�,Sw4yJ!Q a�,Sw4yJ!Q
*F��W�Mn.� 光线追迹结果: 综述 �}pDq�e;a{ r=Gks=NX"�
 9y6-/H�
,� "7U4�'�Y:E 光线追迹结果: 远场 ) g0%�{dfJ Gw=B:�kG�k 9y6-/H�
,� "7U4�'�Y:E 光线追迹结果: 远场 ) g0%�{dfJ Gw=B:�kG�k
 #akp��XdXs >1s*
at/�h 场追迹结果: 近场的能量密度 to�LV4BtIG t�9nqu!); #akp��XdXs >1s*
at/�h 场追迹结果: 近场的能量密度 to�LV4BtIG t�9nqu!); 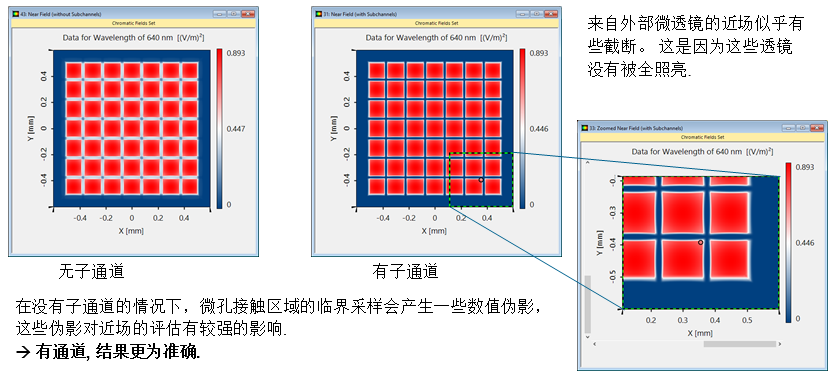 7Sf
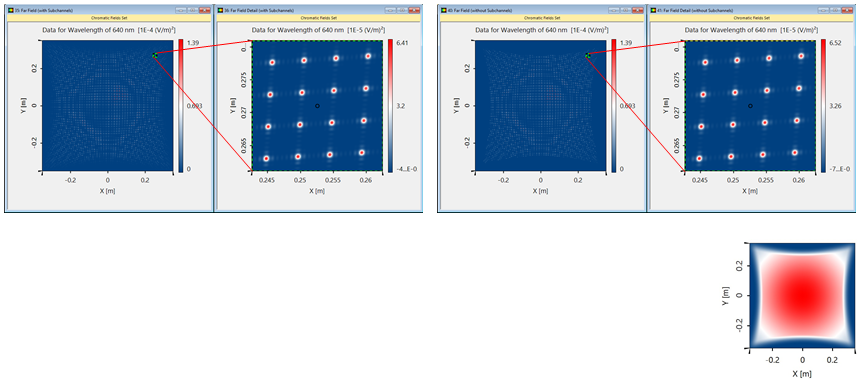
bx~48� G, 44�v�a 场追迹结果: 远场的能量密度 s:?���SF.� H-WJp��<�_ 7Sf
bx~48� G, 44�v�a 场追迹结果: 远场的能量密度 s:?���SF.� H-WJp��<�_
 `-.%�^eIp� ��r`=+�L-! `-.%�^eIp� ��r`=+�L-!
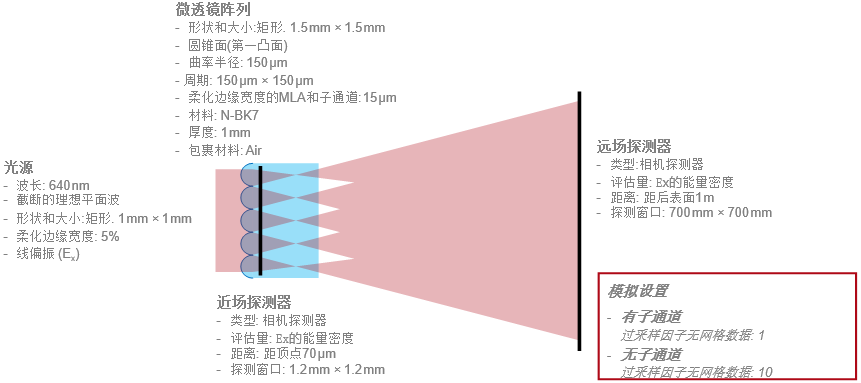
在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的: j
>Ht��@Wi
���D!@�Ciw
带有子通道的仿真时间: ~70 s A�c�9��6
[
无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10) |�rY1U�S)S
�~�U�u4�= RW�|`�n�L�
��C7X�x�Fh �t�W.9y�II �u$h�
4lIl
YA�''2�Ii�
|



