-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-15
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
摘要 3�Q~�zli�:
-�$tf�`� � 微透镜阵列在数字投影仪、光学扩散器、三维成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。 _�a�-�A�t Q/��^�a(��  If�zZ\�x
. H#FH�'@��J 微透镜阵列的结构配置 ;k5B�@z/<S �t>�%+[7?6 If�zZ\�x
. H#FH�'@��J 微透镜阵列的结构配置 ;k5B�@z/<S �t>�%+[7?6 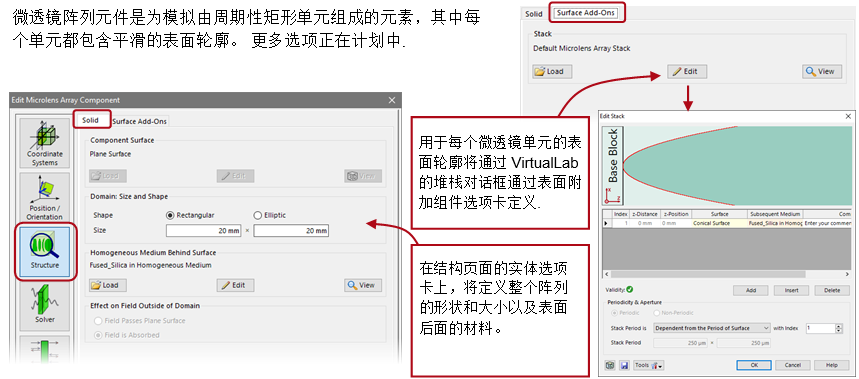 #S') i1��; x}�X
�h�L� #S') i1��; x}�X
�h�L�
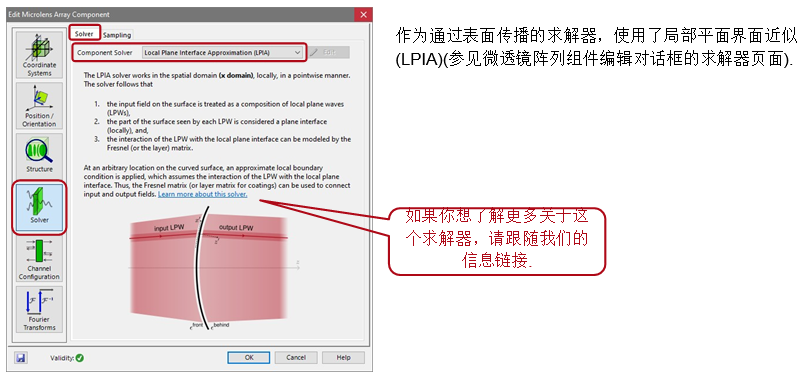
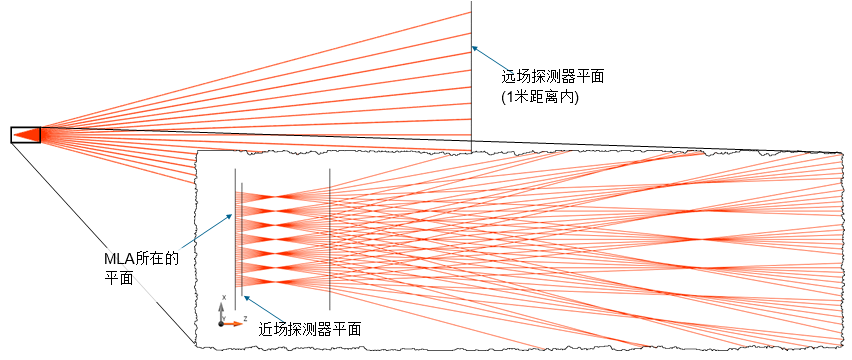
场通过哪一种方法通过MLA传播? `PI?�RU[g* @@�} ]q�T*
 vd#�BT�$d? Xn*�>q��m 子通道分解 6<m��9�guv S7f"�\[Aw� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . +puF0]TR,i • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 B'�!I�{L�C 例如 微透镜的数量,表面变化的强度, z-G*:�DfgH • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 #�s�3�R4@{ • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. m`6�=6�(_p vd#�BT�$d? Xn*�>q��m 子通道分解 6<m��9�guv S7f"�\[Aw� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . +puF0]TR,i • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 B'�!I�{L�C 例如 微透镜的数量,表面变化的强度, z-G*:�DfgH • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 #�s�3�R4@{ • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. m`6�=6�(_p 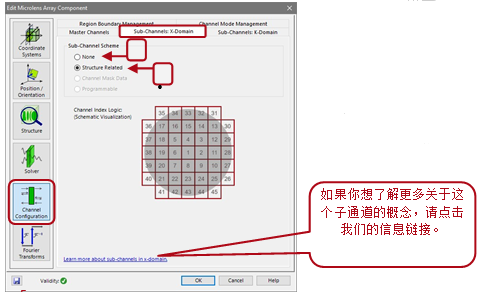 �I|R;�)[;X �I|R;�)[;X
m�eArS*��d qz&?zzz��;
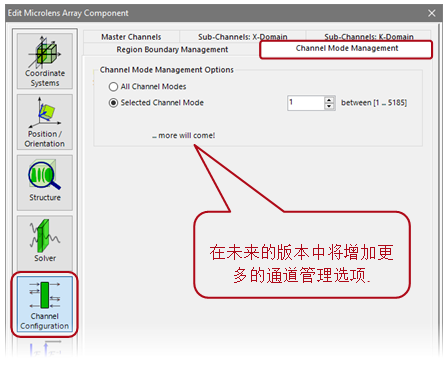
h}y��fL�@� �c�)�;vl%� 子通道评估 bguTWI8�bk ~U<=SyZYo • VirtualLab Fusion还可以分别评估每个微透镜的结果. H� rI�(uZ] @n��xp�cHj • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择. 8�;5�@5A�u �VkZ3�Q7d
 O
�2W2&vY O
�2W2&vY
!A'3M�w\Nm 近场评估探测器的定位 %{ +>\0x�� y?ypRCgO.u 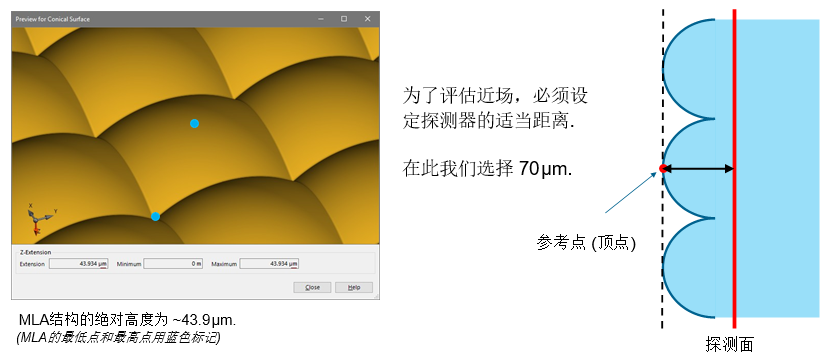 /[,�0,B9!3 �iKA}??5e 区域边界管理 !T���
R�U�
KU 98"b5 /[,�0,B9!3 �iKA}??5e 区域边界管理 !T���
R�U�
KU 98"b5 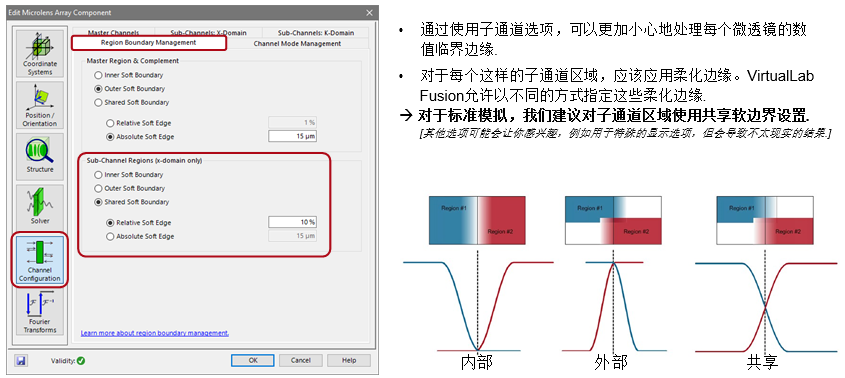 $_Q��]3�"U Y20T�$5�{# 场景演示 z(Q� 5?�+P $_Q��]3�"U Y20T�$5�{# 场景演示 z(Q� 5?�+P
(\M+E
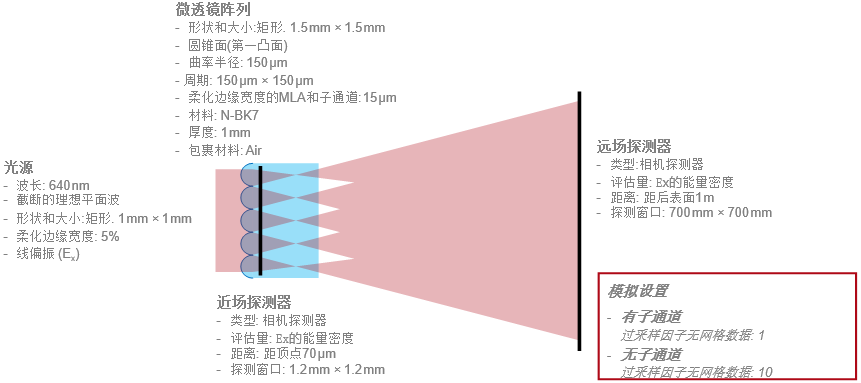
tU<9 演示示例的配置 b�uA/G�-<e �iP�dR;�O'
 +r$����M 9 +r$����M 9
]!v\whZ�> 光线追迹结果: 综述 e1B���qd+� �JG�Q��)/(
 jYE
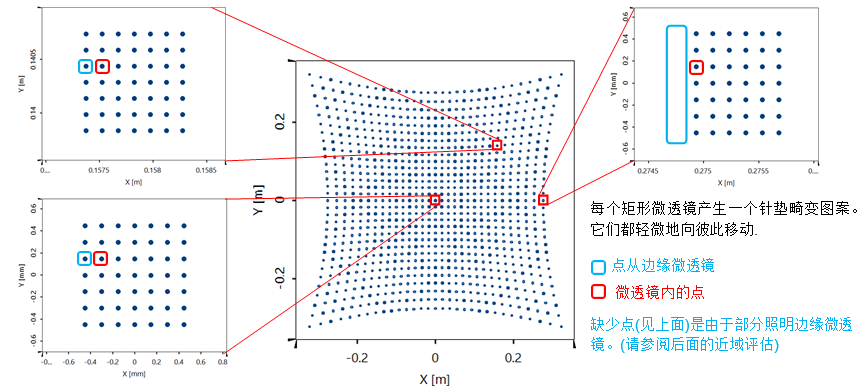
?wc+FT �Wh^�wKF~% 光线追迹结果: 远场 �
\JBPZ~N3 �ujh`&GiB+ jYE
?wc+FT �Wh^�wKF~% 光线追迹结果: 远场 �
\JBPZ~N3 �ujh`&GiB+
 (Z?g^�kjq) m\@�q2�l- 场追迹结果: 近场的能量密度 ~�As�_O6JI YWh�p��4`m (Z?g^�kjq) m\@�q2�l- 场追迹结果: 近场的能量密度 ~�As�_O6JI YWh�p��4`m 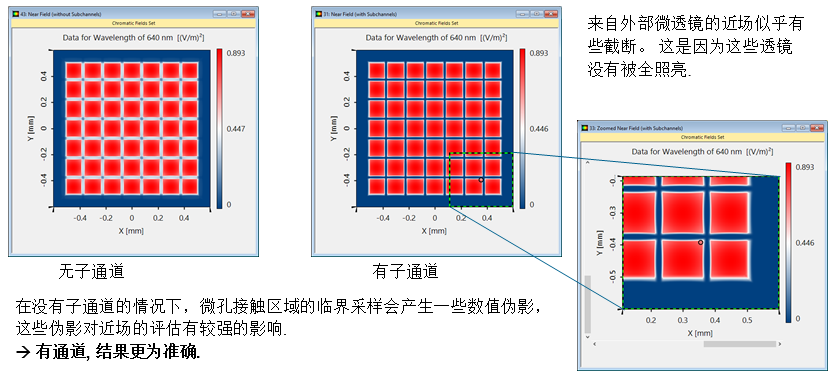 xaN�M?�]% W
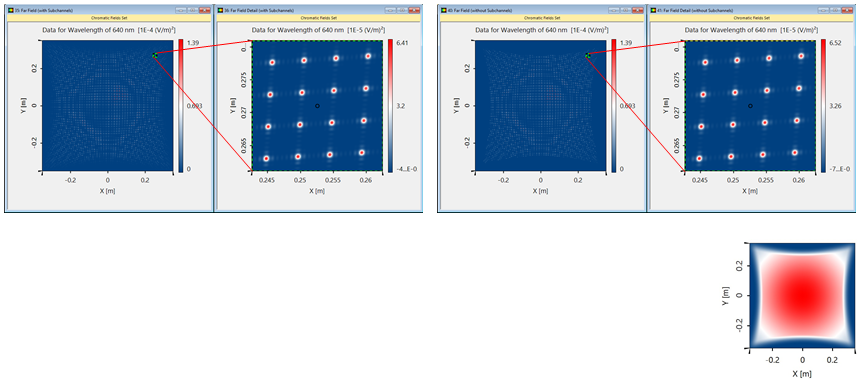
![�*0pL 场追迹结果: 远场的能量密度 O�z-�@e%8L u�$ff %`E� xaN�M?�]% W
 OEhDRU��%k �)Ag{S[yZ� OEhDRU��%k �)Ag{S[yZ�
在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的: >N-l2?r��E
�x/�uC)xm�
带有子通道的仿真时间: ~70 s B~4�7�mw&b
无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10) h=be�n&��m
"�HtaJVp// To =JE}jzo
(\��H^�KEy 9F2MCqv�cm ~qkn1��N%'
�W3��w�$nV
|



