-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-15
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
摘要 yb#NB)+E�@
IgOo�2N"^l 微透镜阵列在数字投影仪、光学扩散器、三维成像等各种光学应用中得到越来越多的关注。VirtualLab Fusion允许应用一种先进的场跟踪算法,通过所谓的多通道概念来分析这样的数组元素。在本例中,介绍了微透镜阵列组件的配置和使用。 Y\����l�en Xj&�fWu�A  8��r���Xu^ ��@<�tk�wu 微透镜阵列的结构配置 h�p]T���^ ,��tZWP�F- 8��r���Xu^ ��@<�tk�wu 微透镜阵列的结构配置 h�p]T���^ ,��tZWP�F- 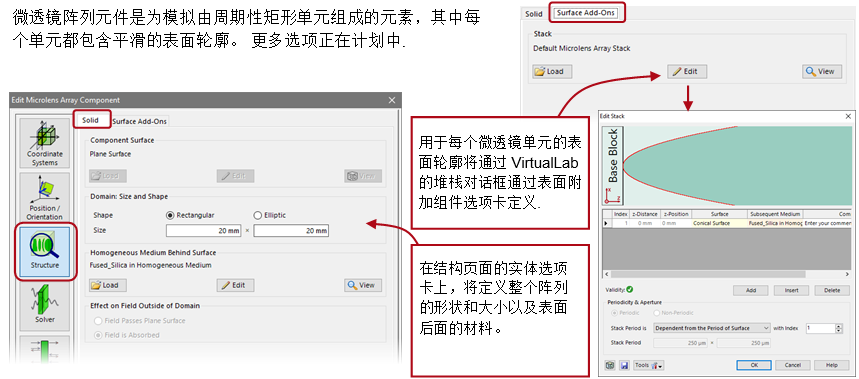 FaC;vuSpy� ^E8XPK�]-~ FaC;vuSpy� ^E8XPK�]-~
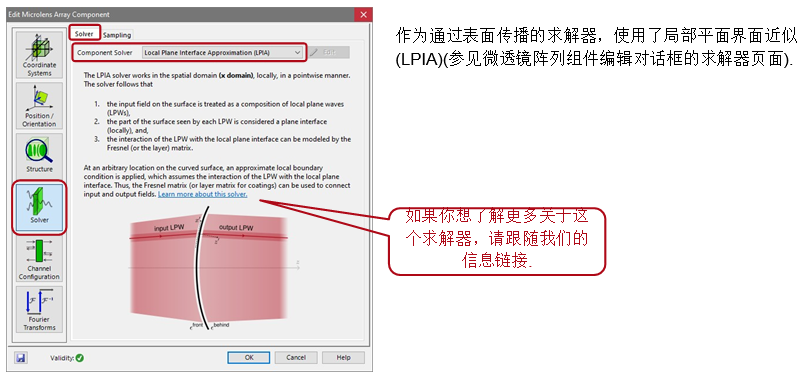
场通过哪一种方法通过MLA传播? %�W=S*"e-� ~�
���FW�@
 7Xi)[M?)�# f�YR�*B0tu 子通道分解 `Li3=!�V�[ �
� `k/hC� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . +v3@WdLcD� • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 i��:�w�TPR 例如 微透镜的数量,表面变化的强度, �SN�B��>�� • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 ,mR$�Y�T8 • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. '�Jww}^h�1 7Xi)[M?)�# f�YR�*B0tu 子通道分解 `Li3=!�V�[ �
� `k/hC� • 该MLA组件的特点是,用户可以选择是通过一步(a)通过多个微透镜传播整个场,还是先分解场,使每个微透镜单独评估,每个这些所谓的子通道的输出场随后通过后续系统进行进一步处理,然后所有场被适当地放在一起(b) . +v3@WdLcD� • 子通道模拟更准确,但可能需要更长的时间。 哪种选择更合适取决于多种因素。 i��:�w�TPR 例如 微透镜的数量,表面变化的强度, �SN�B��>�� • 在哪里评估透镜后面的场(近场、焦点、远场)。 所以最好测试这两个选项。 ,mR$�Y�T8 • 有关配置,请转到通道配置页面上的“子通道:X 域”选项卡. '�Jww}^h�1 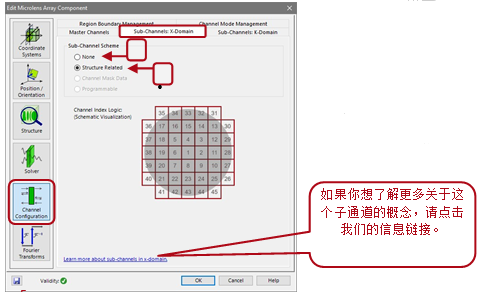 �#y"�E�hwF �#y"�E�hwF
�'PF��?D�~ vd>�X4e�^j
�JB~79Lsdz �X|)Ox
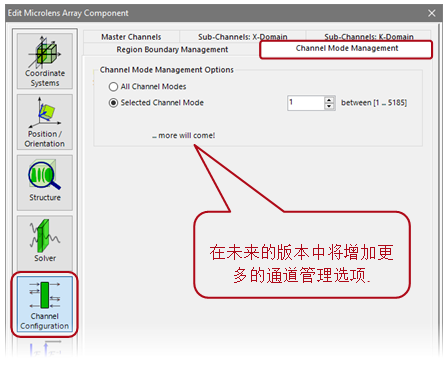
�,( 子通道评估 ��_4V�F>#b y|1,h}�H^n • VirtualLab Fusion还可以分别评估每个微透镜的结果. Y#EM]x�5!= L\--h`~YU� • 在“通道模式管理”选项卡上,通道模式可以通过它们的索引来选择. �w:�P�$�S� }U�K<t�UO�
 2�XubM+�6� 2�XubM+�6�
IP���K.�� 近场评估探测器的定位 c8I :
jDk: �|�-l)$i@ 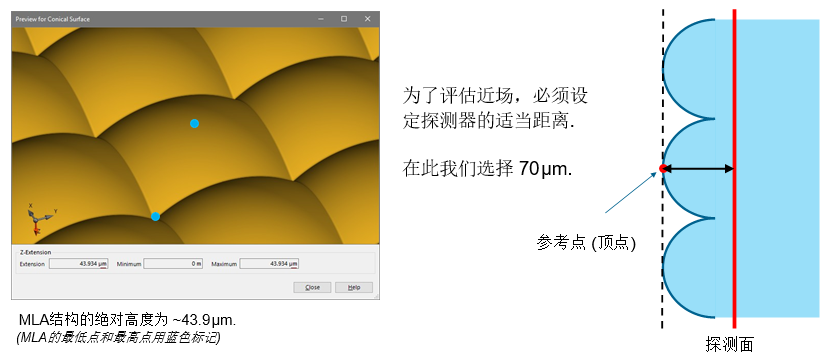 �,r�T62w*e ��M/��XxiF 区域边界管理 ?r"�'J�O.w lL.3$R�p;� �,r�T62w*e ��M/��XxiF 区域边界管理 ?r"�'J�O.w lL.3$R�p;� 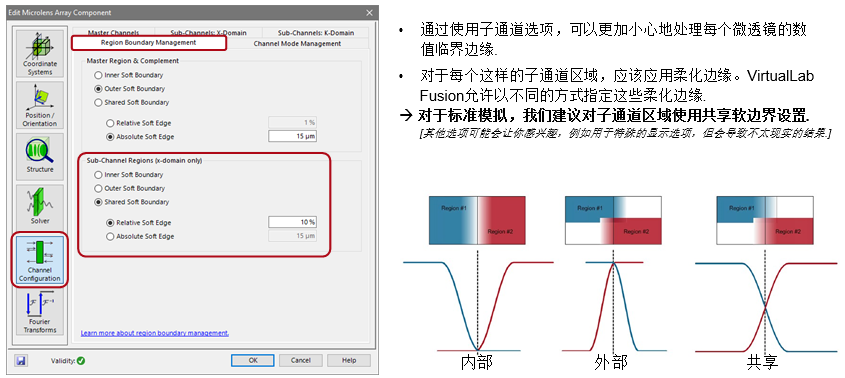 ���y~CK&[H !%<�bL�D8� 场景演示 hiWf�Vz{�~ ���y~CK&[H !%<�bL�D8� 场景演示 hiWf�Vz{�~
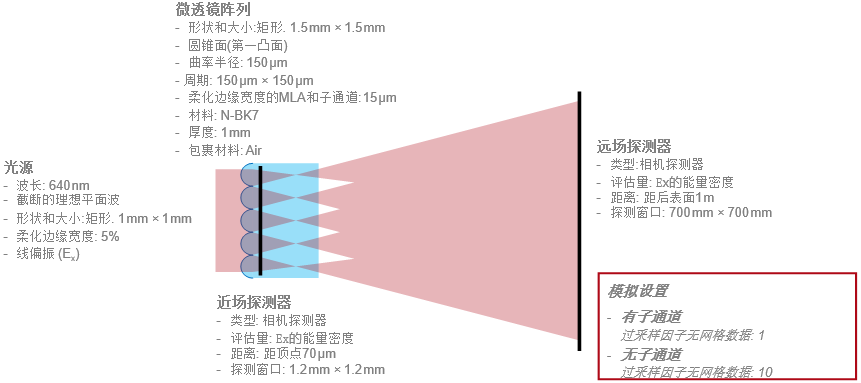
E�(F<s�hT# 演示示例的配置 V��)C�S,w |[/[*hDZ�9
 5�T�)qn`�% 5�T�)qn`�%
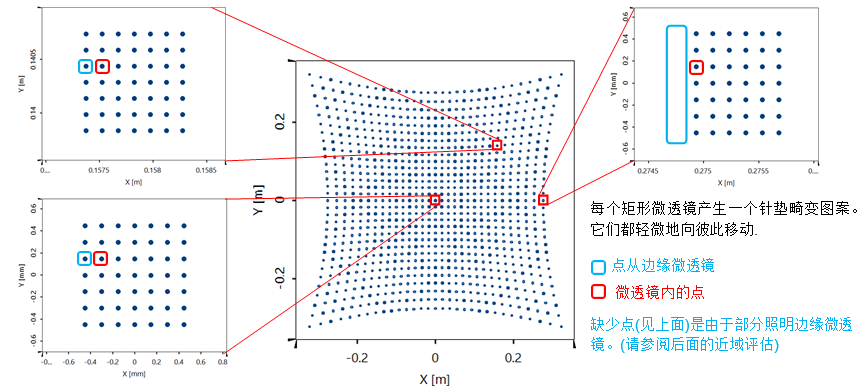
�s���*.C�J 光线追迹结果: 综述 c=�iv\�h�n �I;]Q}SUsm
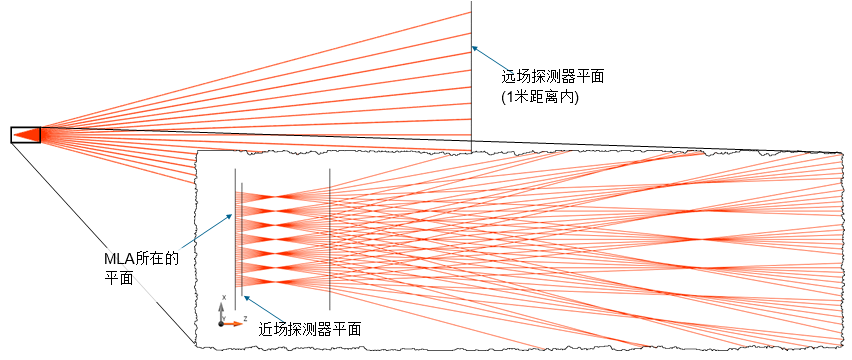 e)kN%J�qW� ,"�~#s���( 光线追迹结果: 远场 @���0cQ4}� Zi5d"V[}T� e)kN%J�qW� ,"�~#s���( 光线追迹结果: 远场 @���0cQ4}� Zi5d"V[}T�
 ;v��0M
::� X#KC<BX�w, 场追迹结果: 近场的能量密度 ��L�P?��E� jEwf�a�_Q% ;v��0M
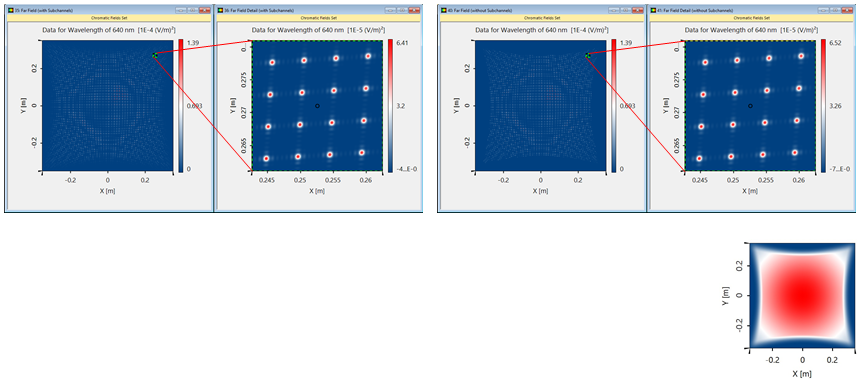
::� X#KC<BX�w, 场追迹结果: 近场的能量密度 ��L�P?��E� jEwf�a�_Q% 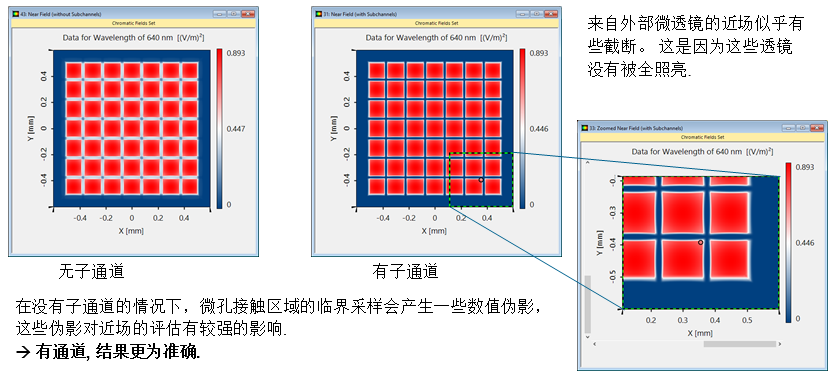 �WV]%llj�^ <u�2��r�b6 场追迹结果: 远场的能量密度 ��4<b=;8� �AsyJD�t'i �WV]%llj�^ <u�2��r�b6 场追迹结果: 远场的能量密度 ��4<b=;8� �AsyJD�t'i
 a[;TUc^I1F /g}2Qm�vH� a[;TUc^I1F /g}2Qm�vH�
在这里,没有子通道的模拟中出现的数值伪影对远场的影响较小。因此,不使用子通道的时间效益可能是可以论证的: TxL;qZRY
^
�eYd6�~T[9
带有子通道的仿真时间: ~70 s v�o��vc,4}
无子通道的仿真时间: ~25 s (无网格数据的过采样因素 = 10) U�f#.�b2�]
[jb�3lO$Xa $I40�� hk�
'r�;C(�Gh6 �J
ik+t\A� nX,2�jT;@L
C{mL�]ds<�
|



