关键词:光线追迹,高数值孔径,点列图,光斑尺寸 AqrK�==�0N
eR8>5:�V�_ 1. 描述 Xb*>7U/'T ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 Q[Tbdc%1EG ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 t2%gS�"�
[ ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 k�Z
9n@($B
j�RdW=/q+( 2. 系统 �j)O�8&[y= 23UXOY0BW� 文件名:UseCase.0082_FocussingSystem.lpd
�ZW8;?#�_ 3. 透镜系统组件编辑 C�wfGp[|}e
<�gr2k8m6$
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 �[WunA,IuR
■ 透镜系统是由序列光学表面(OIS)定义的。 rg+3p�X�\{
■ 每一个可选项都有独立的参数,并可以设定。 S>����?B�)
■ 包括序列光学表面和光学介质。 ��7m��9T'
=0mGfT���c J�c9^Hyqu& 4. 光线追迹系统分析器-选项 �c6p�Gy%T- "��[]J[!}x x�6*.zo5e�
■ 分析器允许用户指定使用光源的光线选项。 :20k�6���)
■ 可以选择选取光线的方法: �P�~��*v}A
— 在x-y-网格 v�]KI=!Gs�
— 六边形 2�HvzM�o-4
— 自由选取 X�`�n�*M]
■ 每一个可选项都有独立的参数,并可以设定。 qfEB �VS(� 12%4>�2}~> 5. 系统的3维视图 p/uOCQ|�1l ol8�uV{�:" 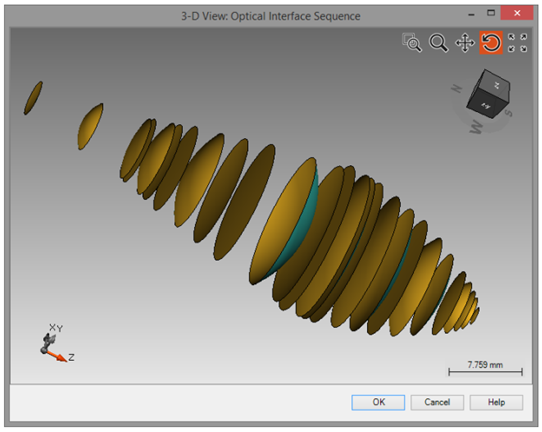 �\A3yM{G~+
�\A3yM{G~+ 光线经过整个光学系统的三维视图
y7�s.6�i}7 光线经过整个光学系统的三维视图(局部放大)
:`�P��;�(h �?�|9$o/Q} *`��V�-z�D $$G^#t1=XZ w]0�jq
U�6 Swz1R�T�� 8. 透镜系统后虚拟屏的结果 �rJm%q�SZz )Z 3�f�ytY �
goT:�\�2
■ VirtualLab可用于计算点列图。 �/`L�ki>�"
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 DP_�b�B(��
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 YR`Mi.,Sfm
■ 你可以通过下面的操作将背景颜色该为白色 $�bK�a"�T*
$�bK�a"�T*
5OUe��|mS� 9. 焦平面上的结果 j{��'@g[HW
]H|�1q��uT
2'�r8�#,�)
■ 在左侧图片中可以看到焦平面上计算出的点列图。 ��wB(
igPi
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 �2WOdTM{u
■ 焦平面上的光斑尺寸为183mm ��m,T�qyP#
■ 此外,背景颜色也可以预先设置。 Swua����dN
■ 该测量采用均方根(RMS)计算法。 .ODtdu�URe �k\}qCD��s 10. 总结 3^us;a�O�r ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 hTn
}AsfLY ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 9aC>��gye! ■ 此外,系统可以直接利用光线追迹引擎进行分析。 #UJ@P Dwil ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 uS|Zkuk[�!



