关键词:光线追迹,高数值孔径,点列图,光斑尺寸 |$S��vD2�^
\AtwO����� 1. 描述 �eF8�aB?&" ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 }�n2-*{)x� ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 VhH]n yi7D ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 ,���SJ�K�
m`yn�9(1Y[ 2. 系统 �bE`*��Uw4 CSX�$P�k*� 文件名:UseCase.0082_FocussingSystem.lpd
�ELga�e1� 3. 透镜系统组件编辑 ��(�/x@�W`
\��xO�2WD
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 �Y?vm%�t`K
■ 透镜系统是由序列光学表面(OIS)定义的。 ev�mEX�<N
■ 每一个可选项都有独立的参数,并可以设定。 {DXZ}7w:�v
■ 包括序列光学表面和光学介质。 0�Yz�b=QMD
#G!Adj+�p5 kO3�k|�6f= 4. 光线追迹系统分析器-选项 )[M<��72�� :UhFou_D4l 7�6i
rb�!-
■ 分析器允许用户指定使用光源的光线选项。 Bc|x:#`C\{
■ 可以选择选取光线的方法: 9��-E>n)
— 在x-y-网格 }AsF\W+��5
— 六边形 e�R�x�[&-c
— 自由选取 �;~Gpw/]5E
■ 每一个可选项都有独立的参数,并可以设定。 e�p}�/dBg� �\IZ�4(��Z 5. 系统的3维视图 ][5p.owJse [�rQ(���ae 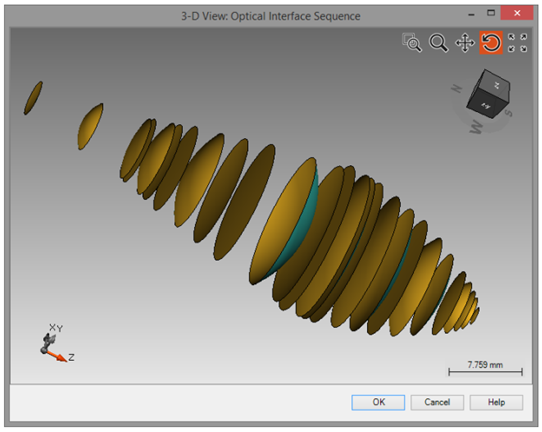 �^)IL<�S&h
�^)IL<�S&h 光线经过整个光学系统的三维视图
s]�%��!�� 光线经过整个光学系统的三维视图(局部放大)
�?�jm2|��: �=+=�|{l?F ,L:)ZZgN�� �eC`f8=V�� {]Iu"�>*��
. _t,O�X$ 8. 透镜系统后虚拟屏的结果 JI,hy
<3l0 7%!�K�Atc� e� ��CUcE(
■ VirtualLab可用于计算点列图。 ZL@DD(S�-/
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 �`o��Wj�q6
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 RWQ�W/Gw�x
■ 你可以通过下面的操作将背景颜色该为白色 D"f(�n�VEr
D"f(�n�VEr
L�Hz<�=]?@ 9. 焦平面上的结果 ��*d�T�f(J
>qvD3�9w��
uWj�-�tzu�
■ 在左侧图片中可以看到焦平面上计算出的点列图。 t��6e-�~��
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 "F�Ix��^��
■ 焦平面上的光斑尺寸为183mm C�Hw�_?�#h
■ 此外,背景颜色也可以预先设置。 w|o@r%Q#�l
■ 该测量采用均方根(RMS)计算法。 OBSJb�DqT ]�L�OtwY� 10. 总结 )II,HT-LY� ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 ZSt
ww{Z�� ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 �
�"<�h#Z( ■ 此外,系统可以直接利用光线追迹引擎进行分析。 �Bc�o��n�4 ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 97�d�I4�t<



