2022 年 12 月,发布 VirtualLab Fusion 2023.1 sw@�2
�?+ VirtualLab Fusion 2023新版本更新内容(三) Tw�h�K>HN 2023.1版本新特性一览 �F��'�~/�� '
R@<4Ib| 基本信息 �(�7wR*vO^
AeJM�[fCMa
 �%!�$-N!e�
�%!�$-N!e�  �RYhd�f��
�RYhd�f�� VirtualLab Fusion 2023.1新版本
主要更新方向 Sd\@Q%
}o\
 ��0$_�imjZ
��0$_�imjZ
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 C1do]1V�H�
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: '�_&(��Iwu
- 更快的速度 a�KUr�":z�
- 更容易使用 z��g�
j�35
- 融合更多物理光学模型 /g9{zR �[�
- 更高的透明度 � !�fV6KkV
- 多元的仿真控制选择 ��?^!��dLW
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 i|�O7nB@
���B*AMo�5
w��:LCm `d
功能概述(以下为更新内容的详细解释和案例展示): SW��Ga%6|�
数据视图 D��vKM>P%|
�*Fc&DQT�( VLF 2023.1数据视图 k:qou})#4� g|HrhU��T; 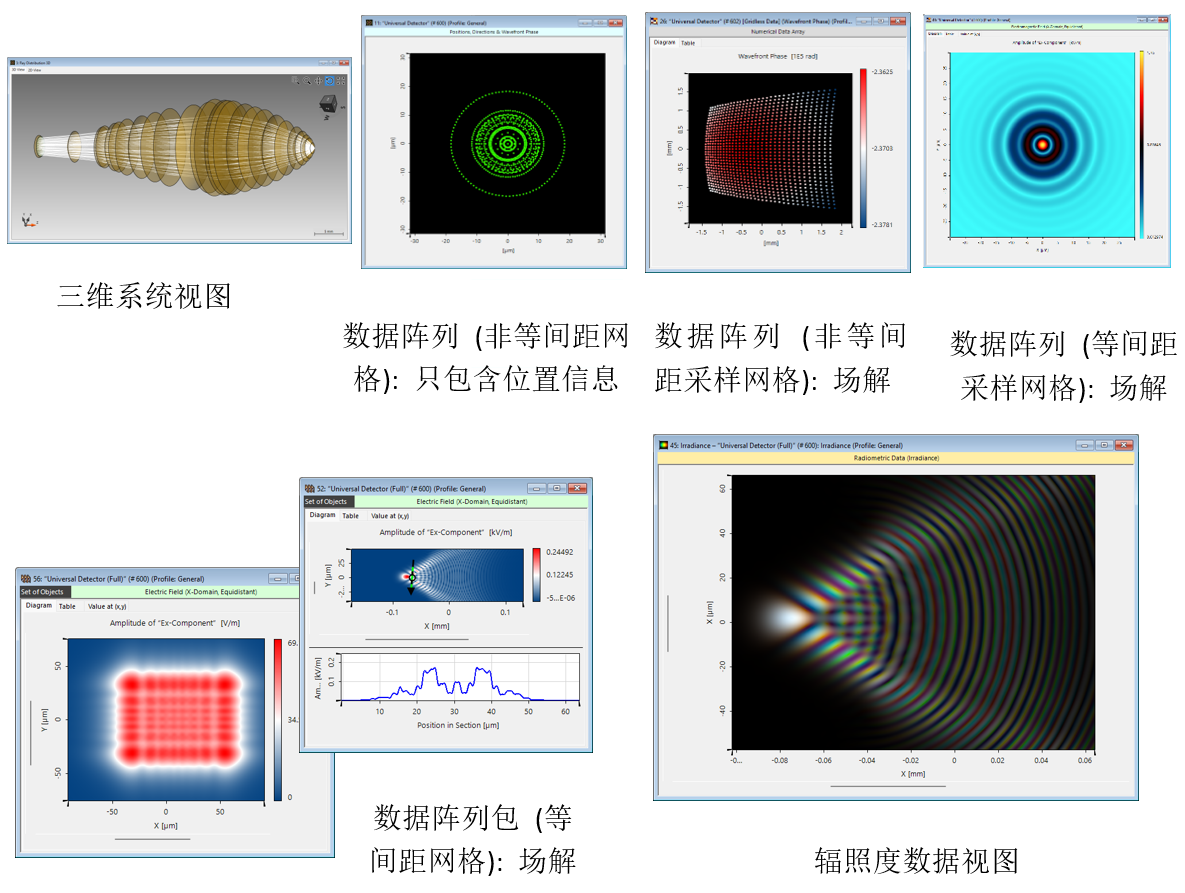 w���+Z�};C UKBMGzu2�: VirtualLab Fusion 2023.1数据查看方式 W�u�QYEbap
w���+Z�};C UKBMGzu2�: VirtualLab Fusion 2023.1数据查看方式 W�u�QYEbap
�&�zd�7�t6
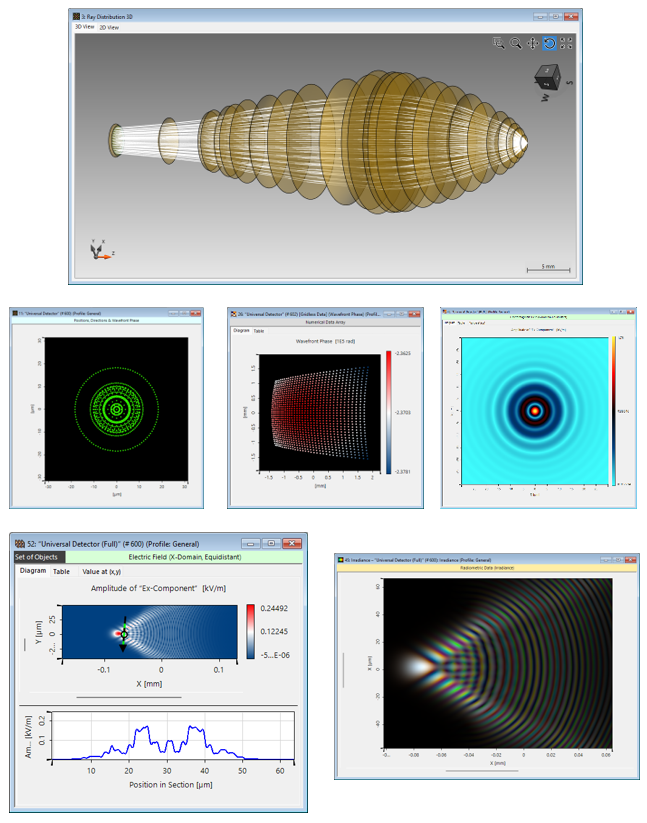 B��T1'@�qF ?��� 7EVmF 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 �;E"mB�4/) 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ,+B�gY4OY� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 -:�>#w`H� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 2"'8��x?.V 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 #]N9/Hij#g
B��T1'@�qF ?��� 7EVmF 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 �;E"mB�4/) 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ,+B�gY4OY� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 -:�>#w`H� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 2"'8��x?.V 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 #]N9/Hij#g
}�\{1�`$*~
M(E_5@�?3�
三维系统视图: 新的对话框以及设置选项 b?Ne�Siswn
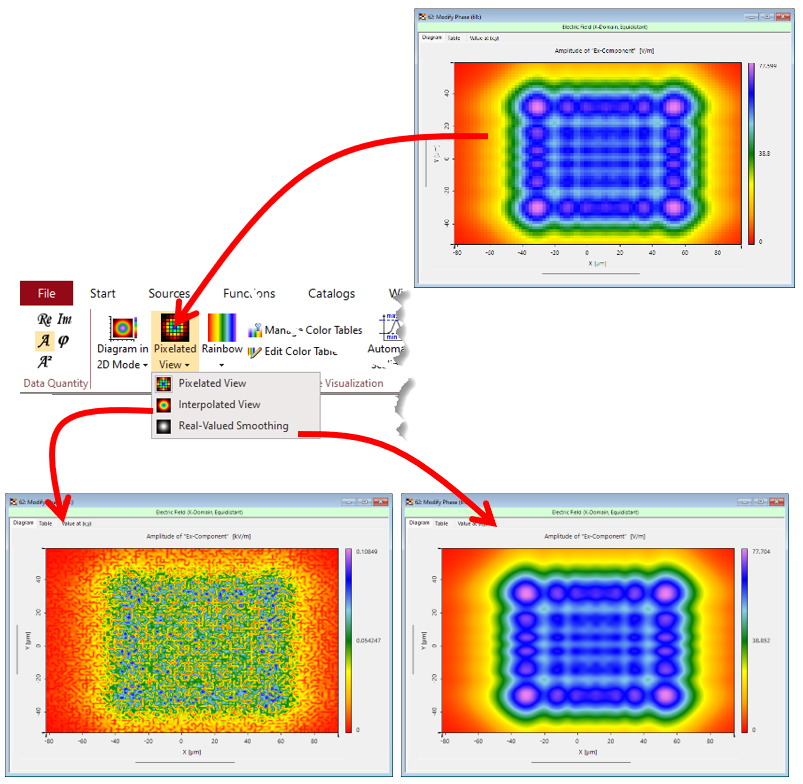
{4 d$]�o0V 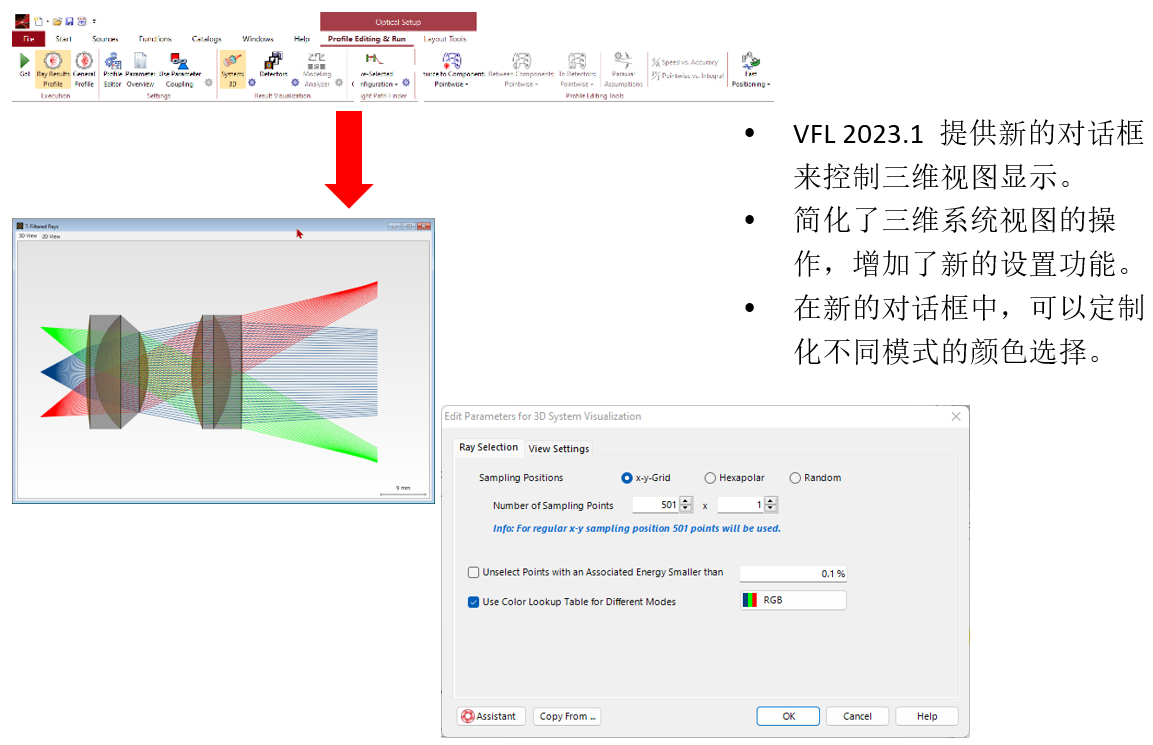 4<K`yU��]" I`kp5lGD�2 数据阵列视图: 像素数据(Pixelated Data)平滑 4w6K|v��<X `4q}D-'TF8 • 探测器中的像素越少,探测器评估速度更快。 v�`w?QIB�] • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 NX�Non*��" • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 NGs9�Jk�e2 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 k�o�>_@]Jb
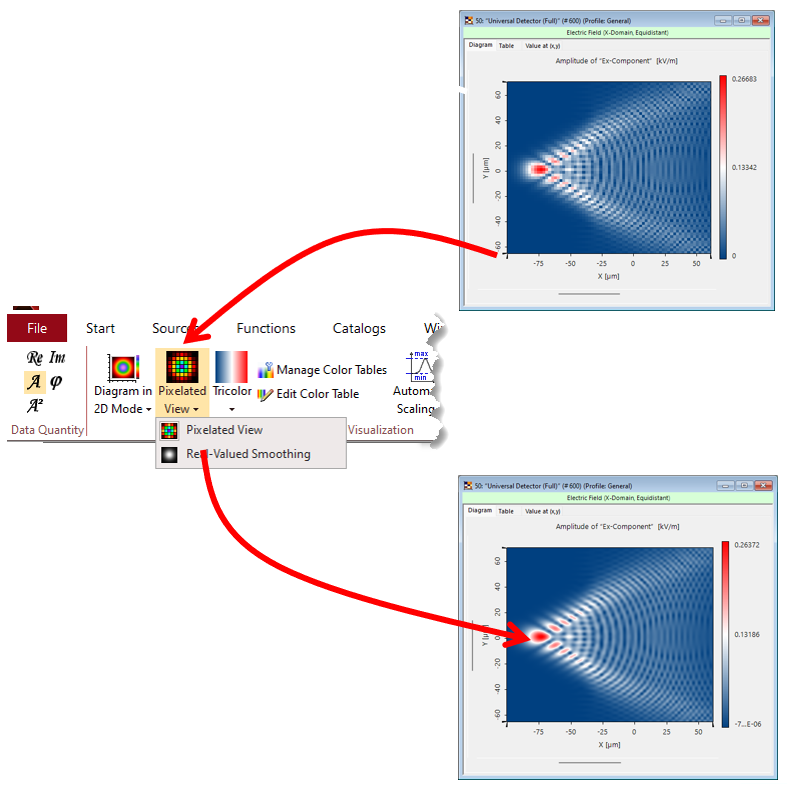
4<K`yU��]" I`kp5lGD�2 数据阵列视图: 像素数据(Pixelated Data)平滑 4w6K|v��<X `4q}D-'TF8 • 探测器中的像素越少,探测器评估速度更快。 v�`w?QIB�] • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 NX�Non*��" • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 NGs9�Jk�e2 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 k�o�>_@]Jb
N6[�^�6�2�
 P�0(~~z&%[
P�0(~~z&%[
�x�i�\RUAW
数据阵列视图: 像素数据(Pixelated Data)光滑化 }g�i'���%e
hN�o>)$v!s
EI.Pk>ZI�m
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 ({�VBp�[Mh
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 z�=_�{jjs�
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 ��pi�otd�,
]e~^YZ�Os�
 <�xjv�7`G7
<�xjv�7`G7
ejY5n2V#=�
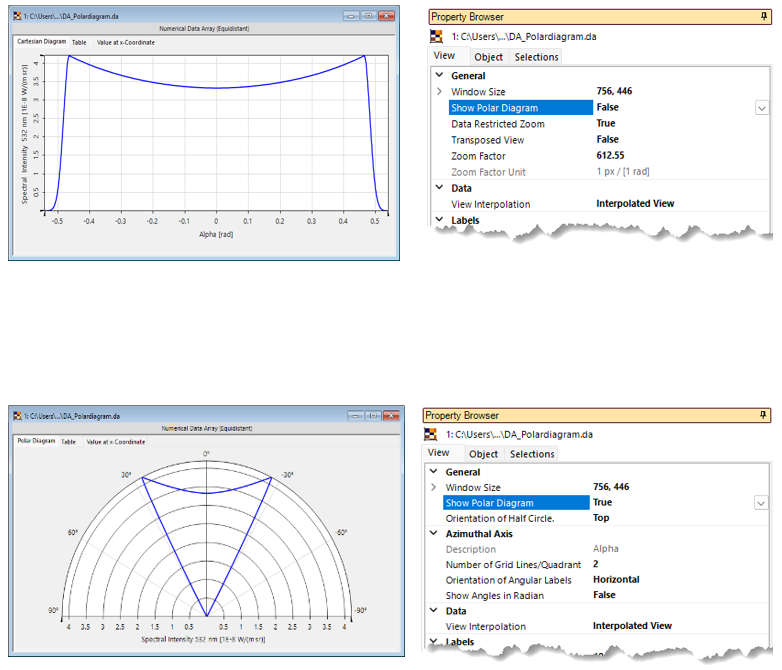
数据阵列视图: 极坐标图(Plolar Diagram) ��7YjucPH#
�\�=V[ba:q • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 P$>kBW5�3 • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 %d J>8.jW@ • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 �kte.E%.PE • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 7NC8<���o;
}2A�1Yt:^P
 �)o</�gt�)
�)o</�gt�)
M9g�\/]Io;
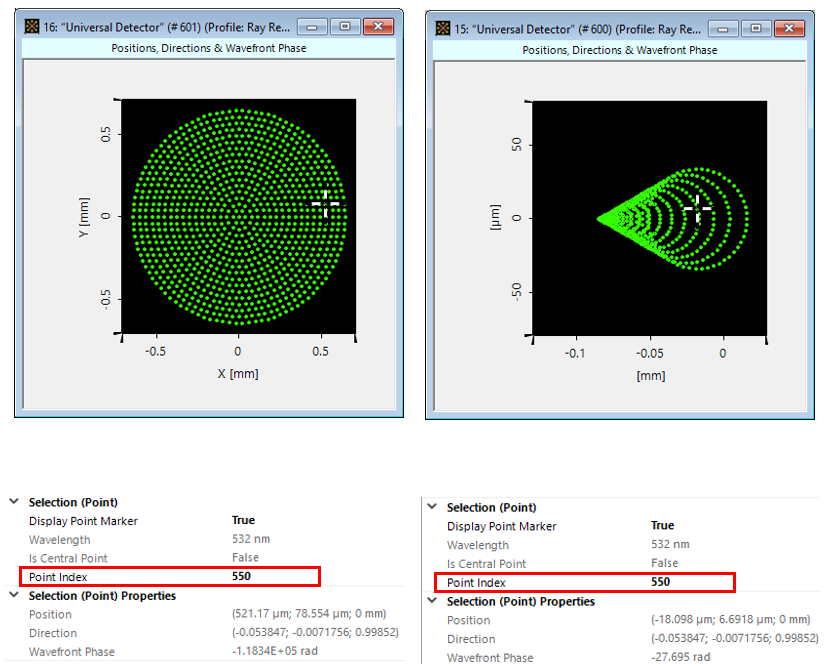
数据阵列视图:找寻以及点的标识 }n%R��l�\p
Q_.c~I}yV�
��}t3FAy(%
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 �<�^_Vl�8%
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 f$�|v0Xs��
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 ��J�8BT�%�
o=#�
[^Z�v
 �Z:�J.FI@
�Z:�J.FI@
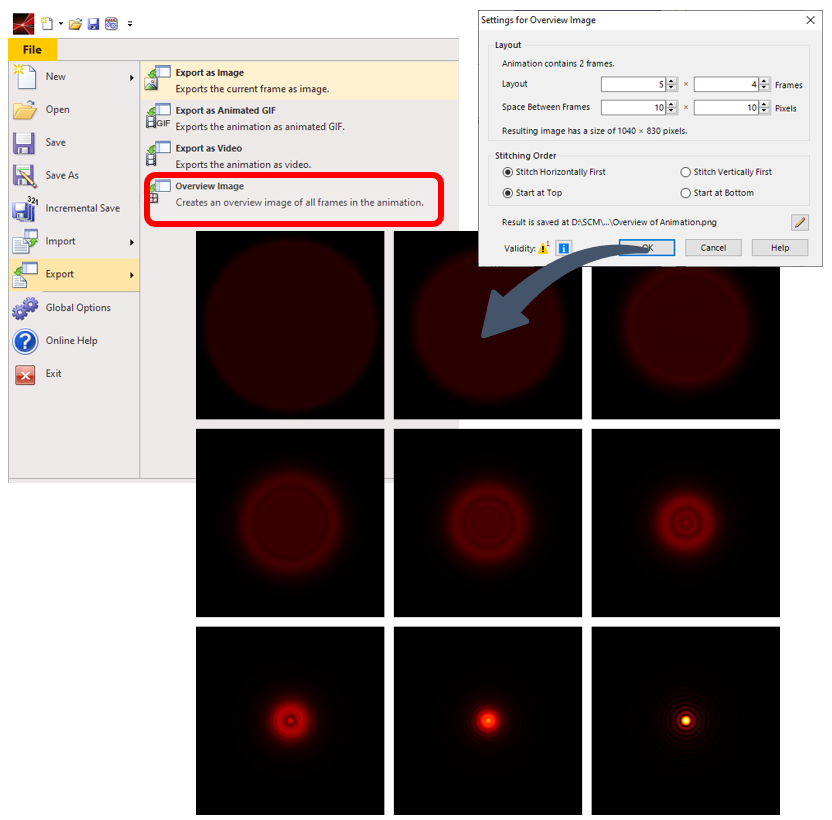
��tB�=D&L3 导出图像的概览 mh7�sY;SvM W.D����3$� -b��0'�Q��
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 )�$h9Y ���
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 AE�4~M`�6D
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 ��PbHh?iH� hY�XZ21(K#
 ��|kNGpwpI
��|kNGpwpI
�3�e6�Y���
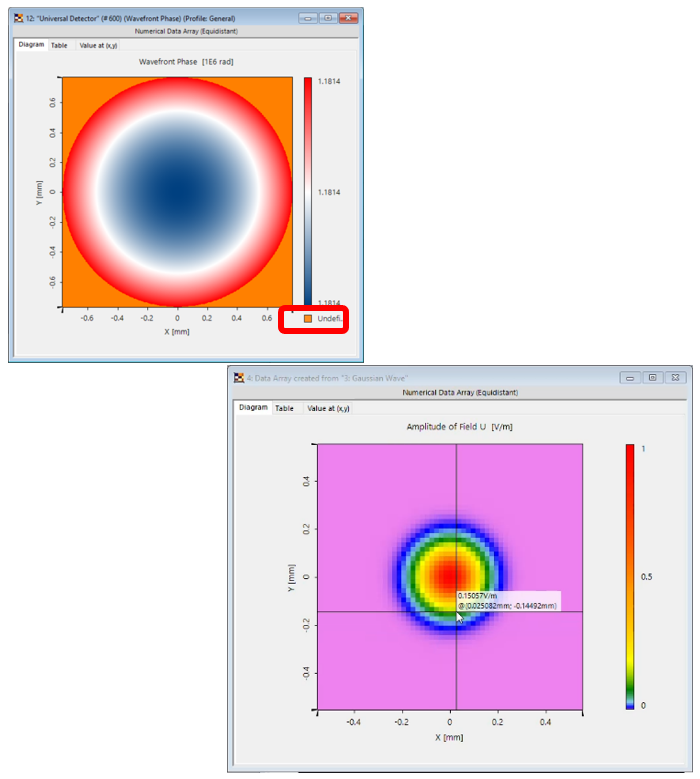
数据阵列视图: 更多的新功能 �#]DZrD&q�
!�[]I%�'�s
�qZsd�dll�
• VFL2023.1可以对未定义区域填充不同的颜色。 E5��BgQ5'
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 c_bVF '�Bz
Gb��|}�Su
 i;hc]fYb=K
i;hc]fYb=K
I��PR �tm!
Graphics Add-ons提供更多数据视图选择 _d| 6��2VS jc.��JX�_/ Wmj�z�KC�l
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 �k\#-6evT
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 :6j :9lYL2
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 G��P��[r^Z JD{�MdhhV 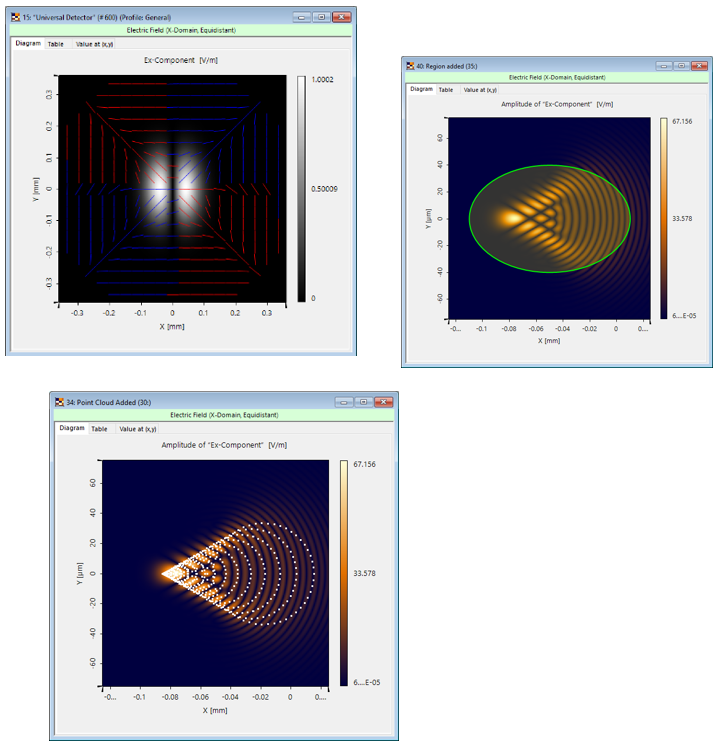 �iqedn�k% qm}>J^hnB# ~d%�;~_n� Graphics Add-ons提供更多视图选择 V}|v!h[O�8 �C9F�+e���
�iqedn�k% qm}>J^hnB# ~d%�;~_n� Graphics Add-ons提供更多视图选择 V}|v!h[O�8 �C9F�+e��� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
>6I.%!��jU • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
9��0qj6.SQ • 图像组件提供了多样化的配置选项。
yD"����0=\ Lkl|4L���� 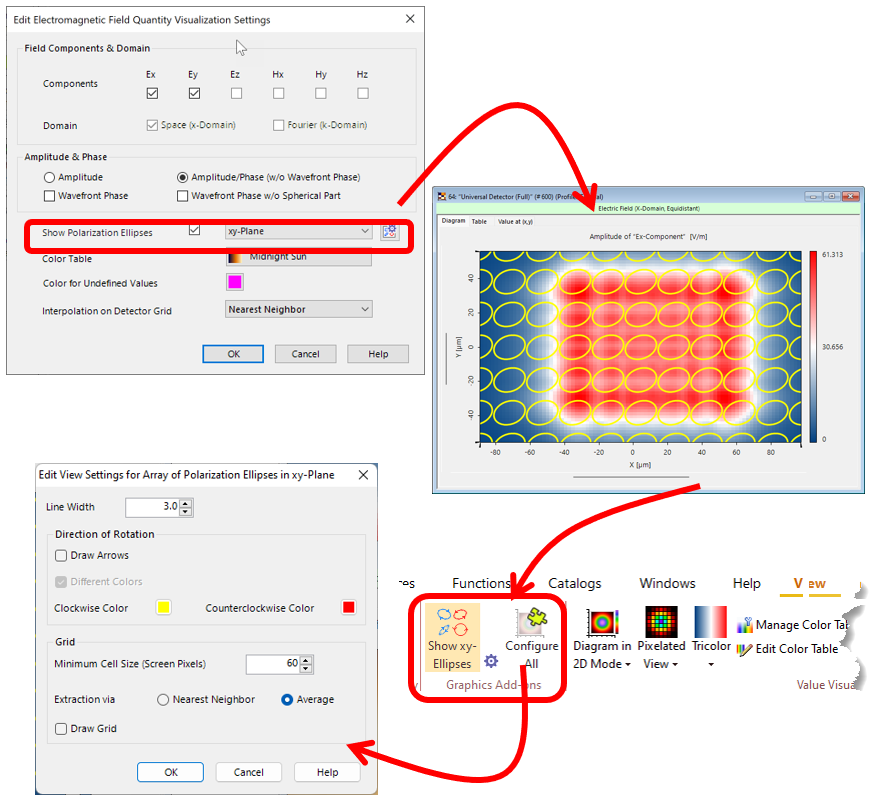 ^~6]��0$yJ �x]R(�t�wi ?S&w0}���R Graphics Add-ons: 增加了 Point cloud 功能 U7"BlT!�V\ @�\T�;PTD- ��J/��x@$'
^~6]��0$yJ �x]R(�t�wi ?S&w0}���R Graphics Add-ons: 增加了 Point cloud 功能 U7"BlT!�V\ @�\T�;PTD- ��J/��x@$' • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
(HaKF7Js�i 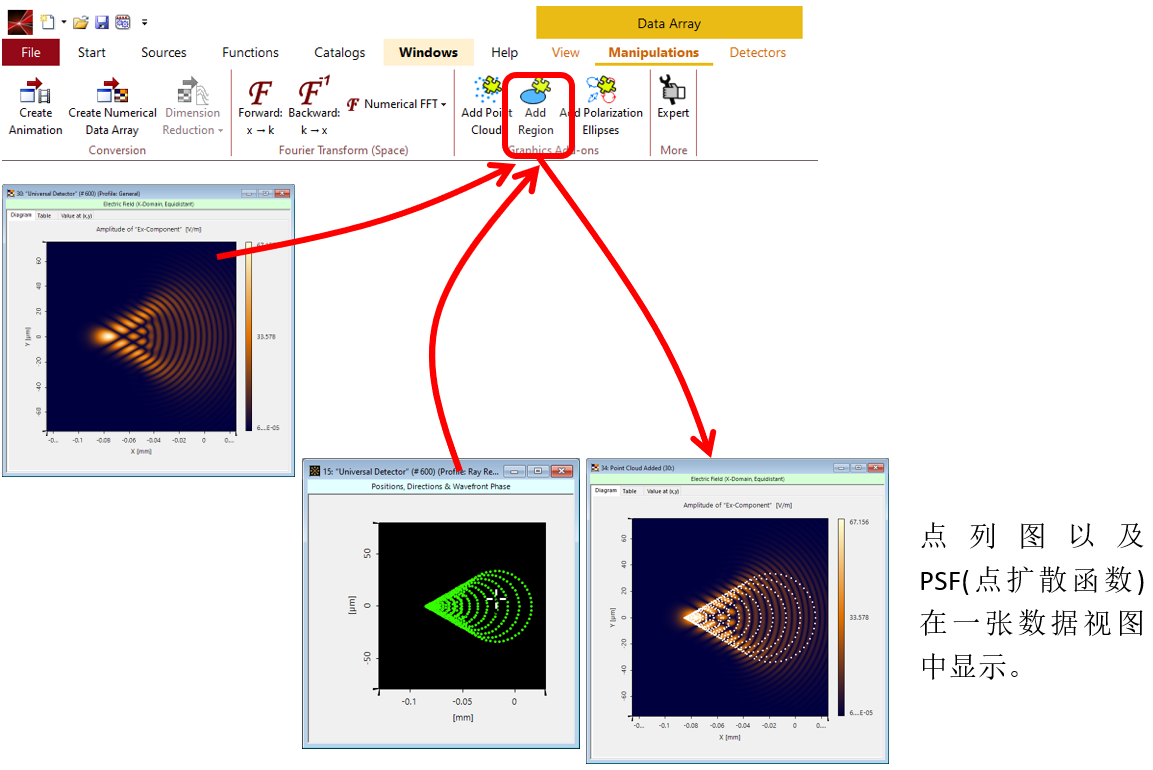 �+|?|8"�Qg r[v�-�?W' VirtualLab中的区域 (Regions) %]�<RRH.�w �5{��FM#�@ u�P��F�HlT
�+|?|8"�Qg r[v�-�?W' VirtualLab中的区域 (Regions) %]�<RRH.�w �5{��FM#�@ u�P��F�HlT • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
(e�RKR2% q 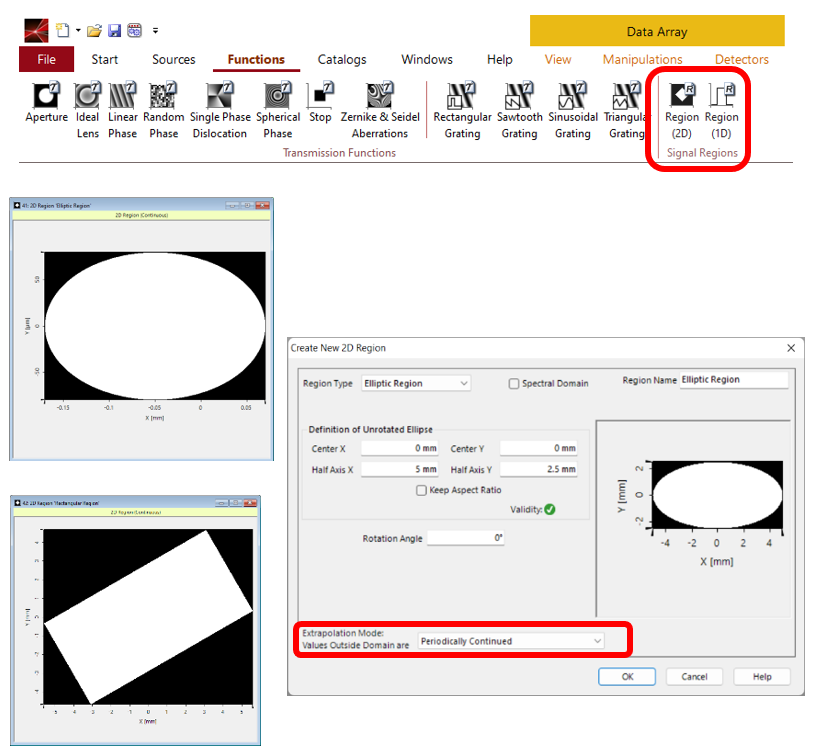 �PyMV�TP�4 7�/|F9fF@M E.�/__Mz@ Graphics Add-ons: 添加区域(Add Region) k�Ws�+2�j� "�@{4.v^}! >nh�E%:X>�
�PyMV�TP�4 7�/|F9fF@M E.�/__Mz@ Graphics Add-ons: 添加区域(Add Region) k�Ws�+2�j� "�@{4.v^}! >nh�E%:X>� • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
���>Qm<-g� 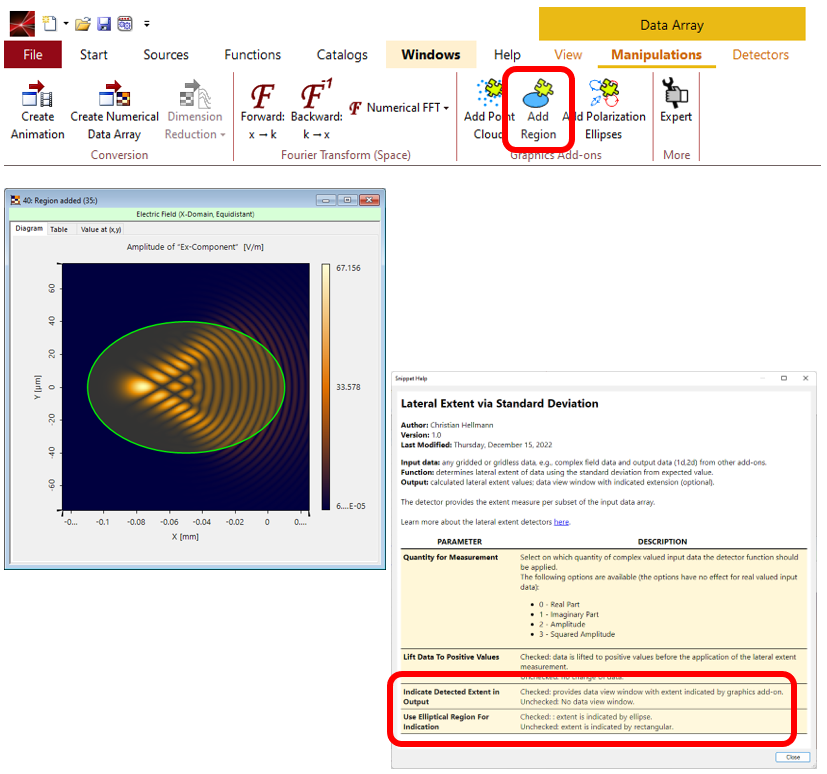 [{�@��zb-h =F'M~3M ��
[{�@��zb-h =F'M~3M �� 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
�:6W^ S/pf ]<�q}WjXD' Graphics Add-ons: 添加区域(Add Region) ;�wbUk5Tf/ �!eR-�Kor� 8jjFC9Cbn0 • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
"br��RME�3 /e�sVu���z 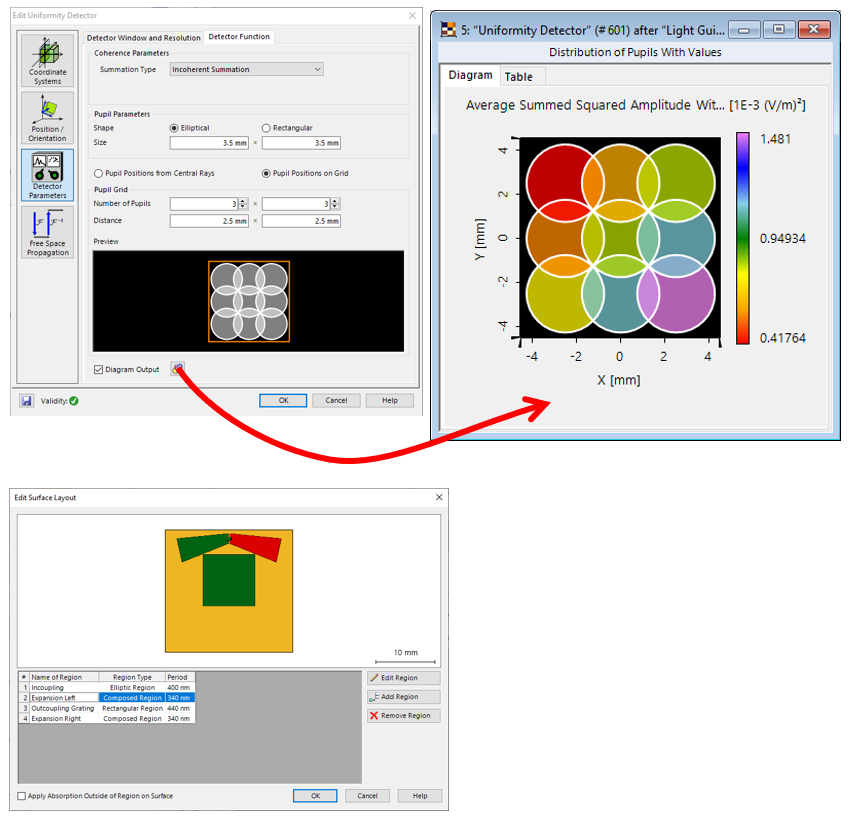 �7<�3U?�]0
�7<�3U?�]0 • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 2Io�6s���' 7 DY Wd�DX 9�fNu?dE
� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
Q54�r?|'�V • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
�5 o#<`_=J 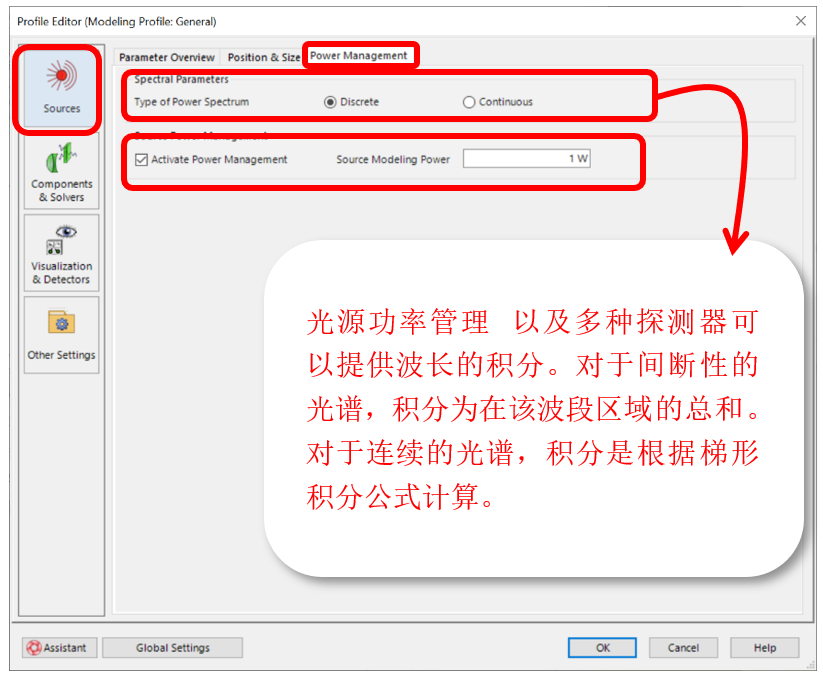 Uv�h~�B^6
Uv�h~�B^6 • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
�pg�LtD};S 1. 针对给定光源参数,进行光源功率的评估。
4bi� NGl~ 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
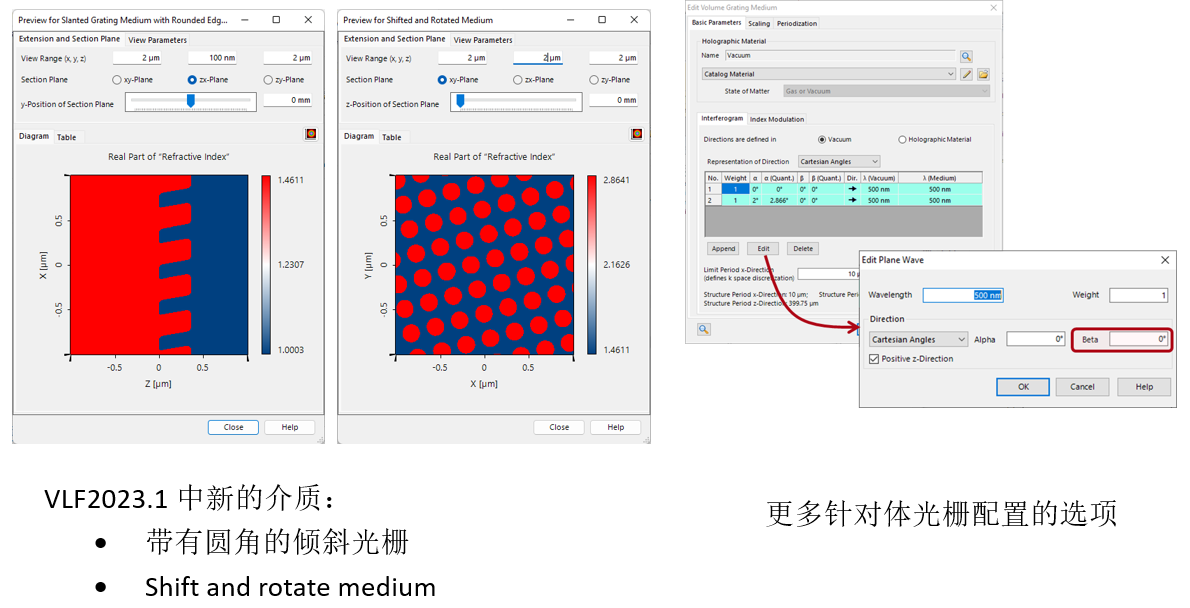
e"fN~`Nh�Y =na�R��{pI 组件 A�fRW=&xdT 组件(Component)新的特征 SE^�j=��1� zLsb`)�!� x6^l6����N • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
:xFu�_��%7 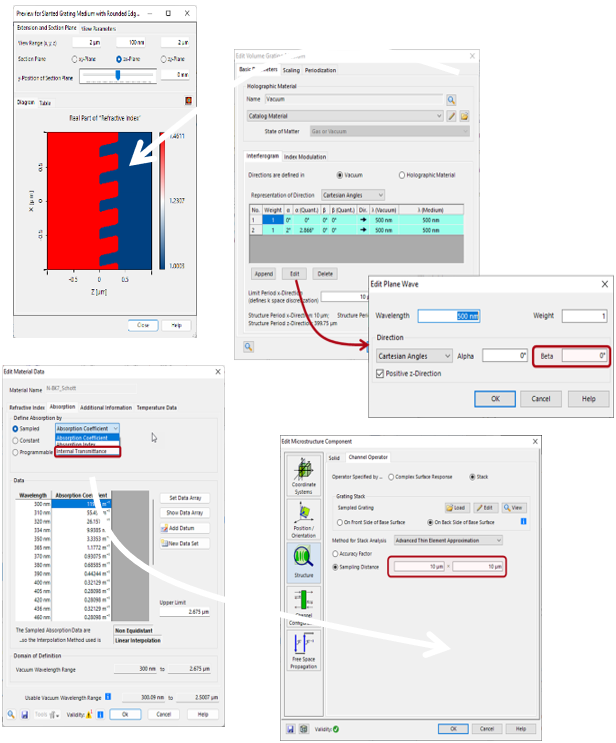 yuH��Z&�e� J3��e�:�Y! 组件(Component)新的特征 �Tm)G��C_�
yuH��Z&�e� J3��e�:�Y! 组件(Component)新的特征 �Tm)G��C_�
�GIm
" )}W
 Fx�C�ZRo�&
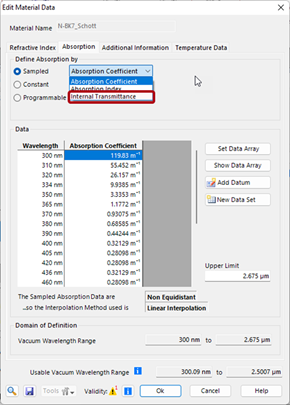
Fx�C�ZRo�& 吸收特性可以用采样数据定义吸收率以及透过率。
sno`=+�|U] (#!]�fF"!x 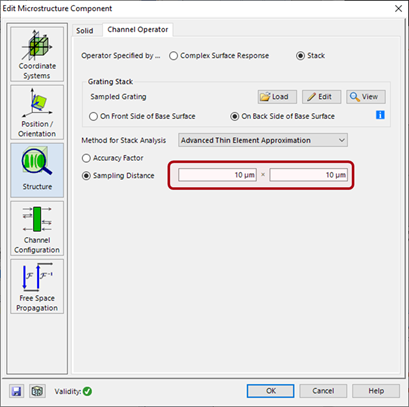 oZ�vA~]x9\ >Z�T&� �`E
oZ�vA~]x9\ >Z�T&� �`E 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
9�Uha2��o X�XW]0{k:y 组件(Component)新的特征 c,y|c`T �2
�yiV�G� ]s
 =)�I"wR"v$ �H8@8M�Fz\ 组件(Component)新的特征 �e-X��� HN
=)�I"wR"v$ �H8@8M�Fz\ 组件(Component)新的特征 �e-X��� HN
�1�� -Z�JT
 i:o}!�RZ>� �A�l�7<s�� 组件(Component)新的特征 $�. �%�L��
i:o}!�RZ>� �A�l�7<s�� 组件(Component)新的特征 $�. �%�L��
�(CdJ�;-@D
 d^F|lc �]8 �)K~w'�TUr �xvU]jl6�d
d^F|lc �]8 �)K~w'�TUr �xvU]jl6�d 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
��XTJv�V�� 处理日志 �H�js���} 0�Y�zsA#yv 扩充版的处理日志 ���ao#!7�F X�ZS5B~E
' �~>�V-*NT8 • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
^=Ej�adVQ� 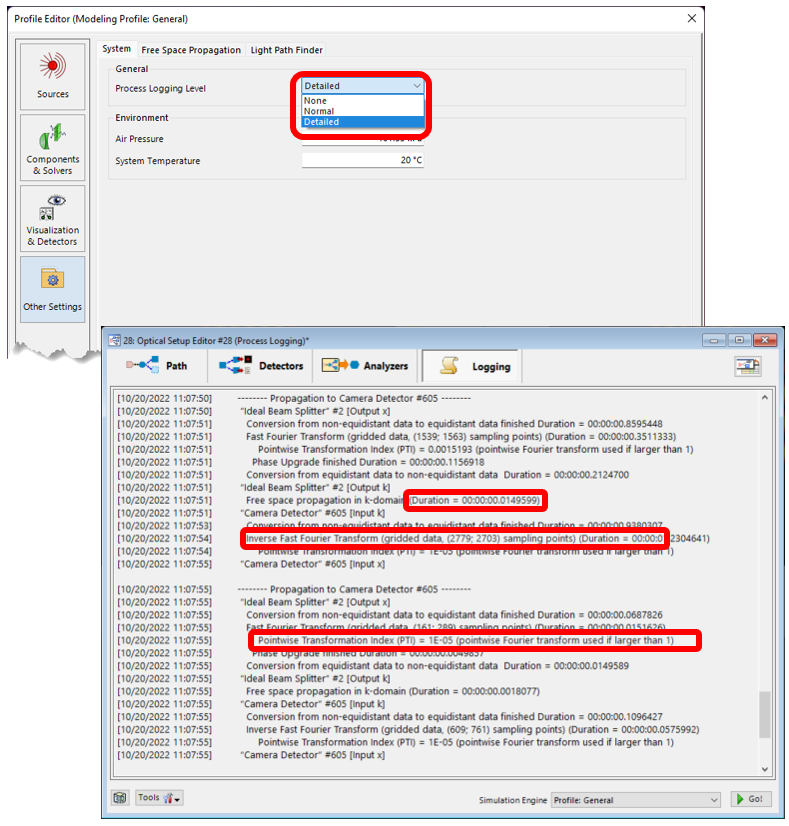 +�T�C1nkX� 8-7�do�kg> 系统仿真分析 *E:x E/M!2 2�5:Z;J��>
+�T�C1nkX� 8-7�do�kg> 系统仿真分析 *E:x E/M!2 2�5:Z;J��> • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
3VmI0gsm.> 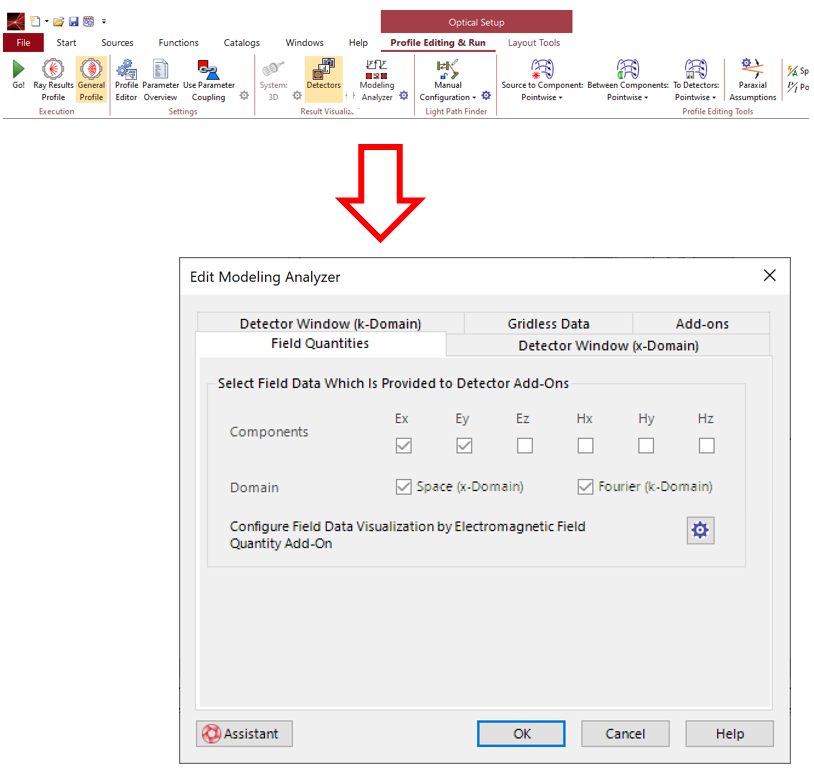 A\K�,_&x1Z [oV{8�3�f� 专家模式(Expert Modus) Q1Ux�!$_�� �g���Q37> 专家模式中的数据阵列’Manipulations’ 0n3��D~Xzd '>@4(=I��� _%Bz��,�C8
A\K�,_&x1Z [oV{8�3�f� 专家模式(Expert Modus) Q1Ux�!$_�� �g���Q37> 专家模式中的数据阵列’Manipulations’ 0n3��D~Xzd '>@4(=I��� _%Bz��,�C8 • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
6�*u�,c�^a 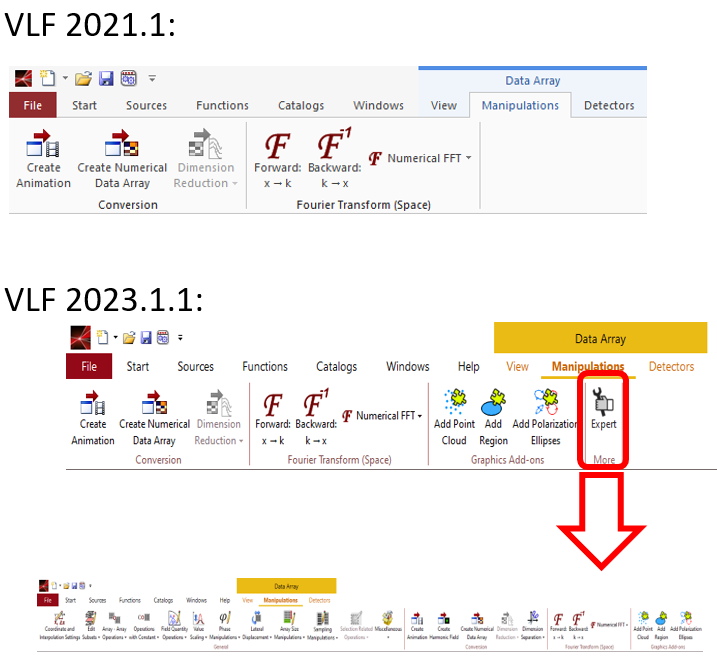 N�{8"�s&� 4q�hWm"&CM 微小的改进帮助:新的计算器 *8�b�K')W �n@!w�p/J, MIq�"Wy|Zs
N�{8"�s&� 4q�hWm"&CM 微小的改进帮助:新的计算器 *8�b�K')W �n@!w�p/J, MIq�"Wy|Zs • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
�A\z�`c
e! 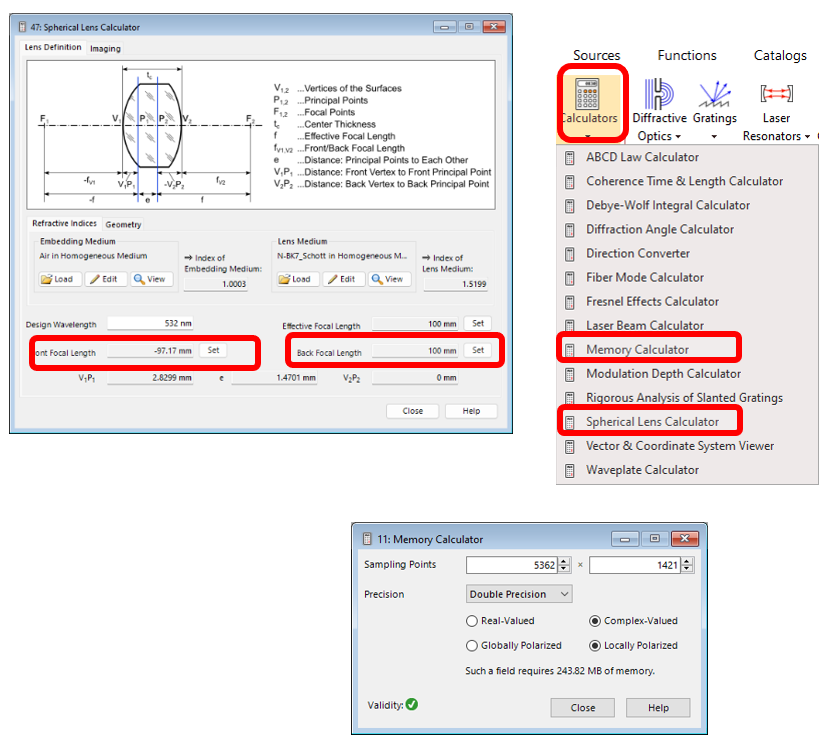 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



