2022 年 12 月,发布 VirtualLab Fusion 2023.1 �+�^^S'mP8 VirtualLab Fusion 2023新版本更新内容(三) G�Q��YtH#
2023.1版本新特性一览 Q1N,^�7�1 LM'*O�tpDG 基本信息 p�l1EJ� <�
Li?{�e+��g
 %�xH���>0
%�xH���>0  )w�}�*PL��
)w�}�*PL�� VirtualLab Fusion 2023.1新版本
主要更新方向 =��y,y�QO�
 �4fU5RB�7%
�4fU5RB�7%
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 h=p-0 Mx .
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: U� �8qKD�
- 更快的速度 ^>P@5gcoE(
- 更容易使用 ;-<<1Jz/2�
- 融合更多物理光学模型 Sgj�r4axu�
- 更高的透明度 D�_,_.�C~O
- 多元的仿真控制选择 ��N#�2nH1C
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 e+]��YCp[(
�(rY1�O:*S
;GS�f���N�
功能概述(以下为更新内容的详细解释和案例展示): `Tm�8TZd66
数据视图 W~W�?�<%@�
�`*uuB��; VLF 2023.1数据视图 sKE*AGFL�d eAenkUBz6, 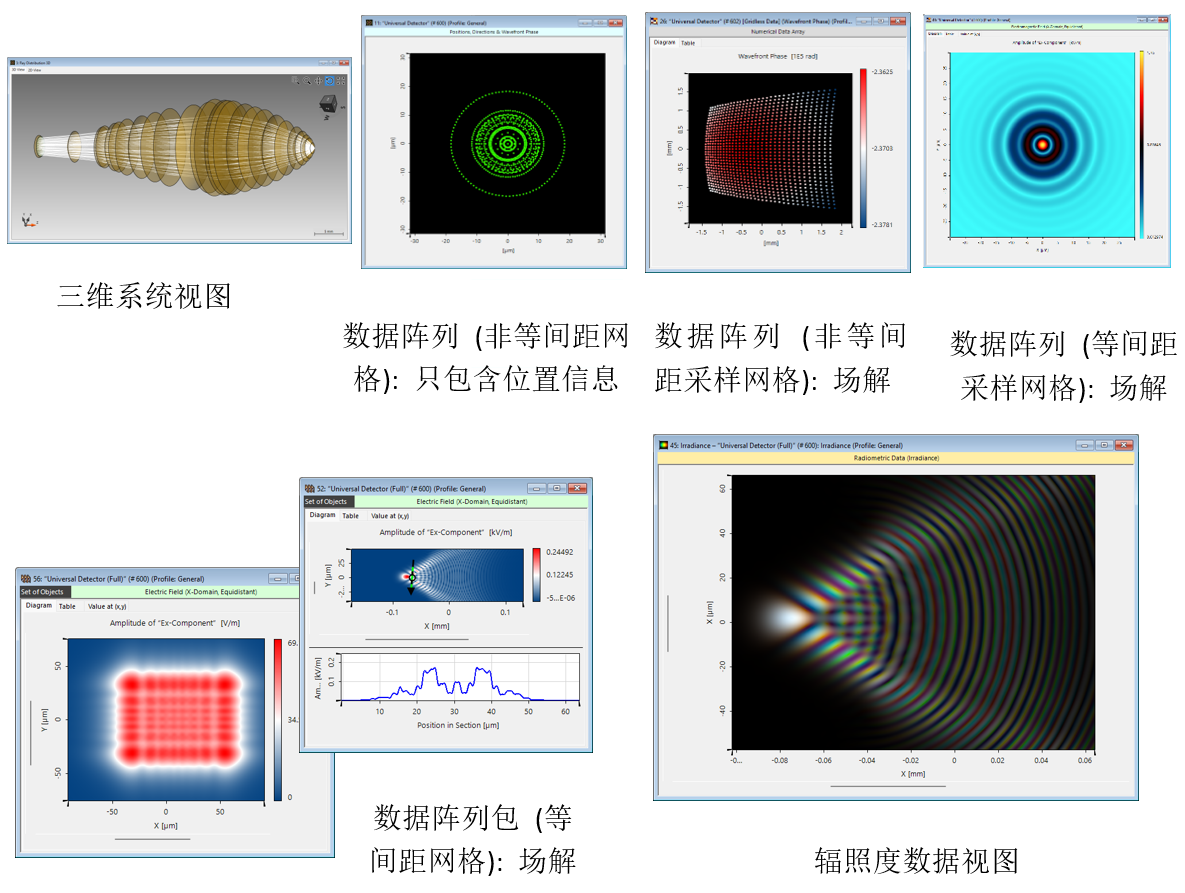 �Is,*qrl : +Q�b���2LR VirtualLab Fusion 2023.1数据查看方式 Qh1Kl_a?Lv
�Is,*qrl : +Q�b���2LR VirtualLab Fusion 2023.1数据查看方式 Qh1Kl_a?Lv
���RmCn&-i
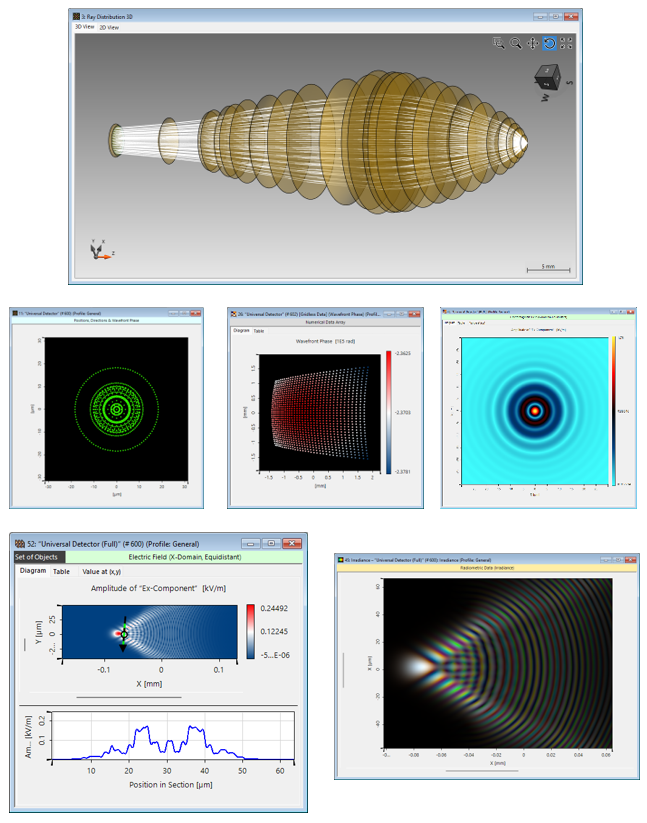 9X^-��)G>� A)�s"�h=R 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 FdK R�{dX} 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 PauF�uzPP� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 w~�F�O:�/� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 A%�sxMA!K, 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 &55uT;7] a
9X^-��)G>� A)�s"�h=R 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 FdK R�{dX} 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 PauF�uzPP� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 w~�F�O:�/� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 A%�sxMA!K, 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 &55uT;7] a
�Z�P�G8q�
ud��~VQXZo
三维系统视图: 新的对话框以及设置选项 �]�cO$�E=W
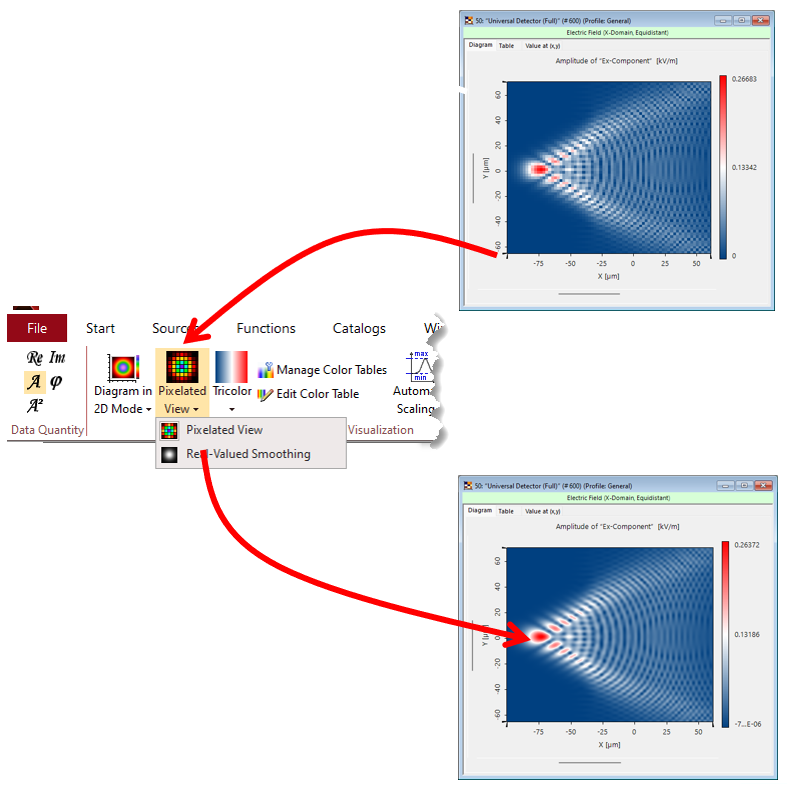
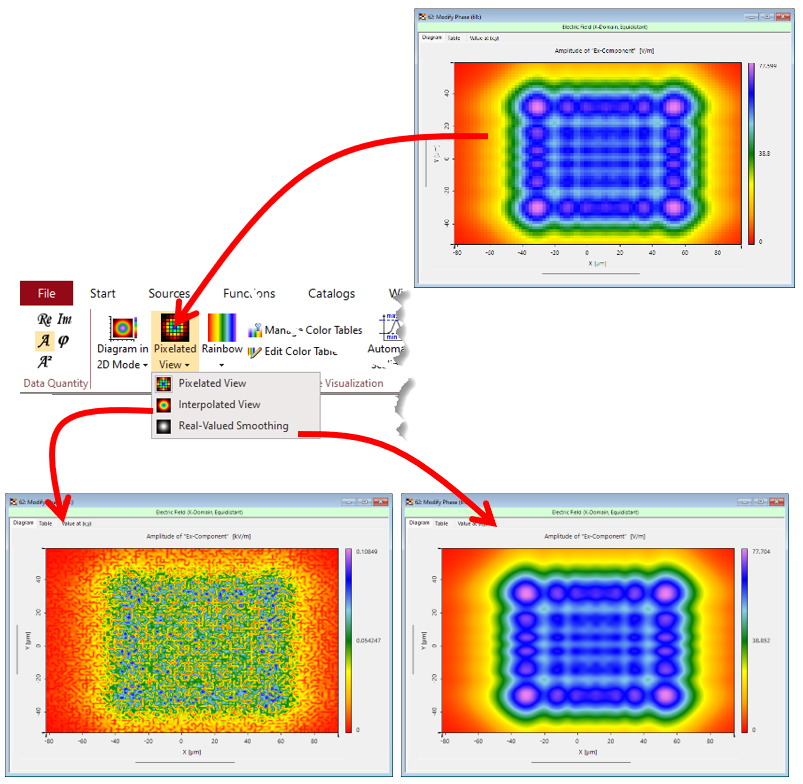
b}��q(YgH< 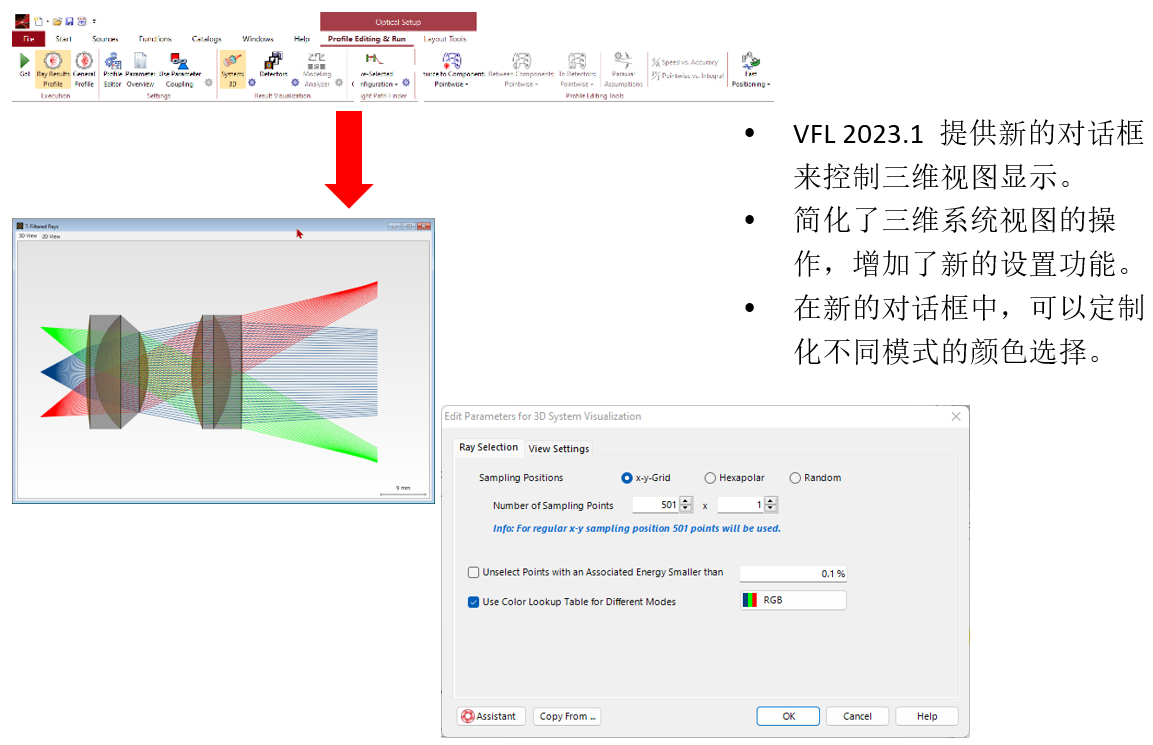 []�]Ly�Wk 9�M-�]~.�O 数据阵列视图: 像素数据(Pixelated Data)平滑 |SJ%
�_#=i e�Jw��i�i
• 探测器中的像素越少,探测器评估速度更快。 6I�6Z�VSxb • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 })=c:�h�&� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 (}7o
a9�Q< 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �>5z`�SZf
[]�]Ly�Wk 9�M-�]~.�O 数据阵列视图: 像素数据(Pixelated Data)平滑 |SJ%
�_#=i e�Jw��i�i
• 探测器中的像素越少,探测器评估速度更快。 6I�6Z�VSxb • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 })=c:�h�&� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 (}7o
a9�Q< 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �>5z`�SZf
n6�-!@RY�r
 |H|eH~.yg&
|H|eH~.yg&
�TJGKQyG$L
数据阵列视图: 像素数据(Pixelated Data)光滑化 \Jj�'�60L^
U:\oGa84A
eB1e�UK>��
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 0%L$T�J.''
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 P^�{`d_[K%
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 ��-:1Gr��8
����]V[�
 �d�T�-�O�8
�d�T�-�O�8
?[|�4�QzR�
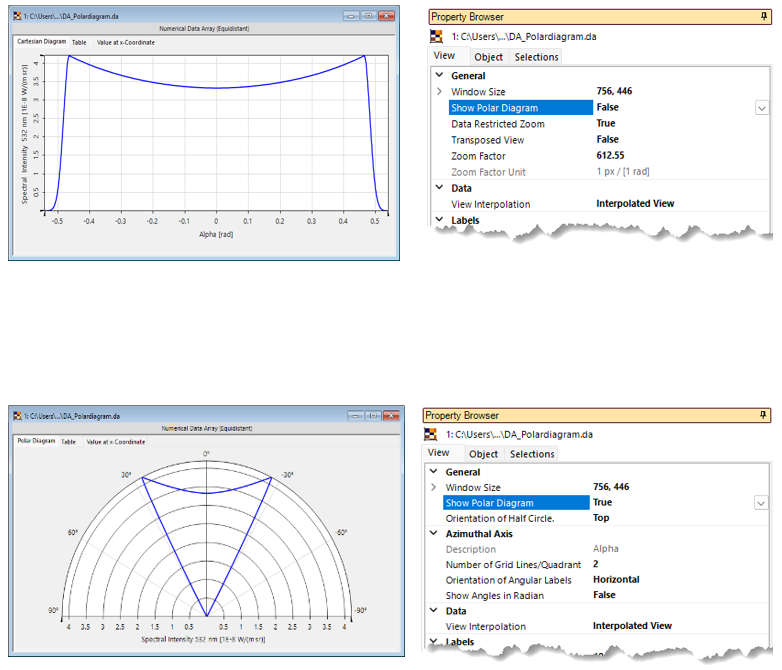
数据阵列视图: 极坐标图(Plolar Diagram) �CEJG�=�*3
5����'�}!v • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 tGy%n[ �\� • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 looPO�:bo^ • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 �h�"%,eW|^ • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 zYl+BM-j,6
,;-���cz-,
 oeqJ?1�=�!
oeqJ?1�=�!
{&AT}��7�
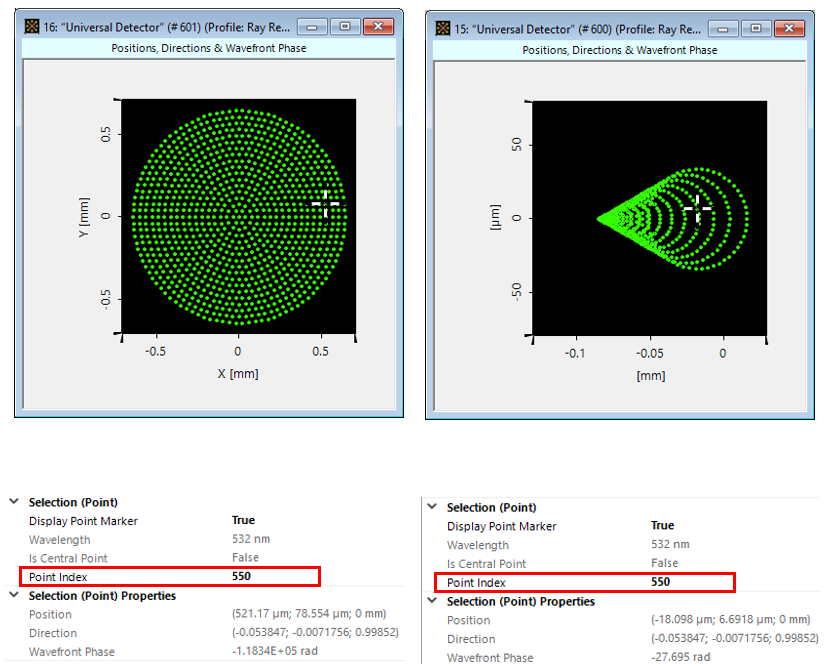
数据阵列视图:找寻以及点的标识 �sC*E;7gT,
cH8H)�5�5F
����|Z�)/�
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 X]qp~:4�G�
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 �uX��5B>32
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 �LAjw!QB��
#�cg@����Z
 ri.|EmH2:D
ri.|EmH2:D
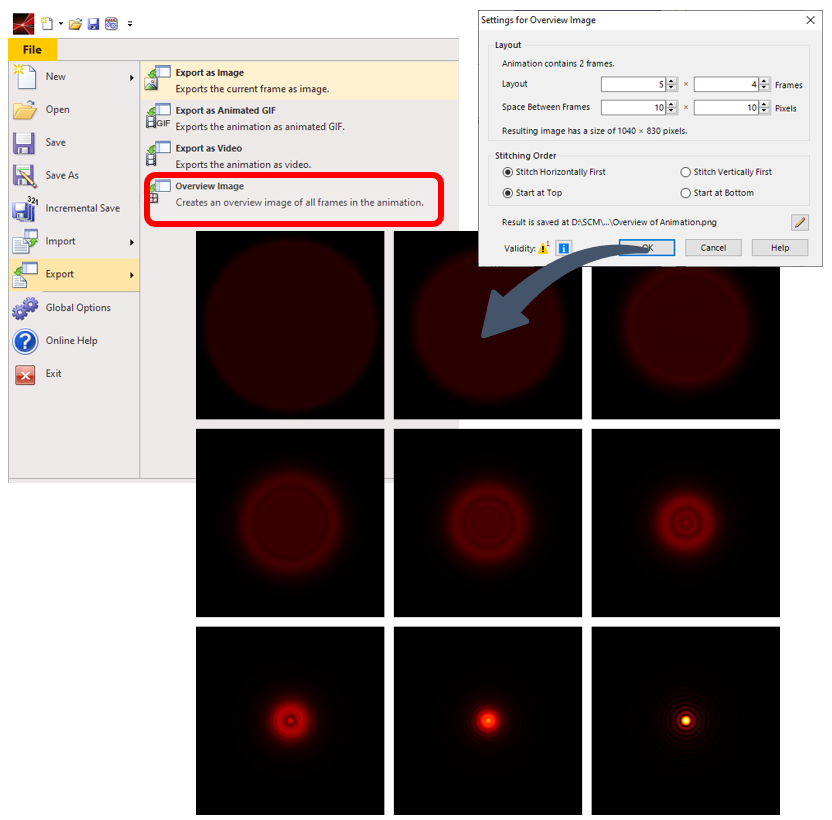
��pmXWI`s� 导出图像的概览 �}�&^bR)= %4g�4 C#�� '{_t�Dbo�Y
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 R=f5:8�D<-
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 Boz_*l���|
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 ,}x�C��) > �`����1}yB
 �kys-~&�@+
�kys-~&�@+
oF��A$X Y
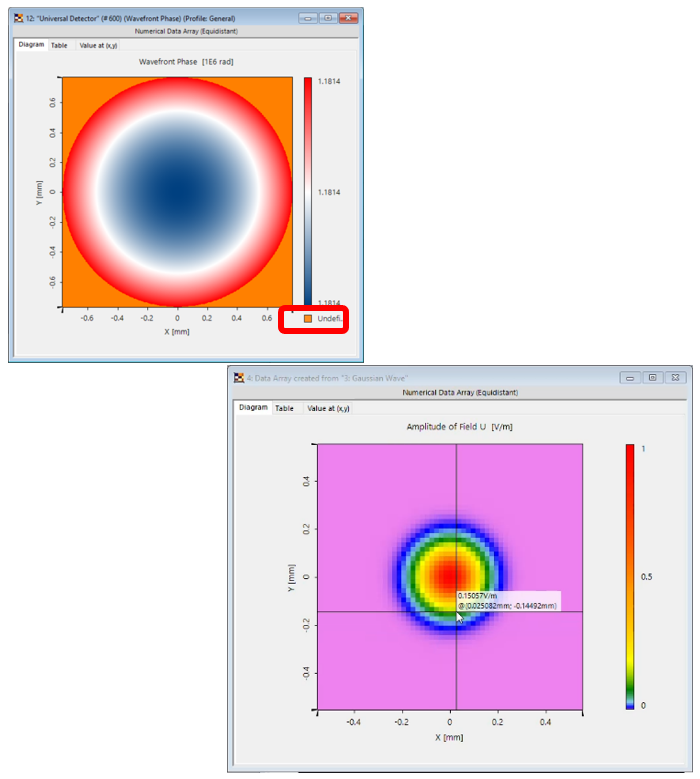
数据阵列视图: 更多的新功能 :<|�fZa4!"
a�\.�?�{/
"+OMo-<K�7
• VFL2023.1可以对未定义区域填充不同的颜色。
TO�P'�Bmb
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 h-u*~5dB<&
�2/W0y!qh1
 D}=i���
tu
D}=i���
tu
T�u���PxyB
Graphics Add-ons提供更多数据视图选择 = ~R3*�G�N (?=(eo<N�� ��l�Jp�v��
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 yOm6HA``hT
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。
HAOrwJFqU
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 Lgw@y!Llij iw6M3g# 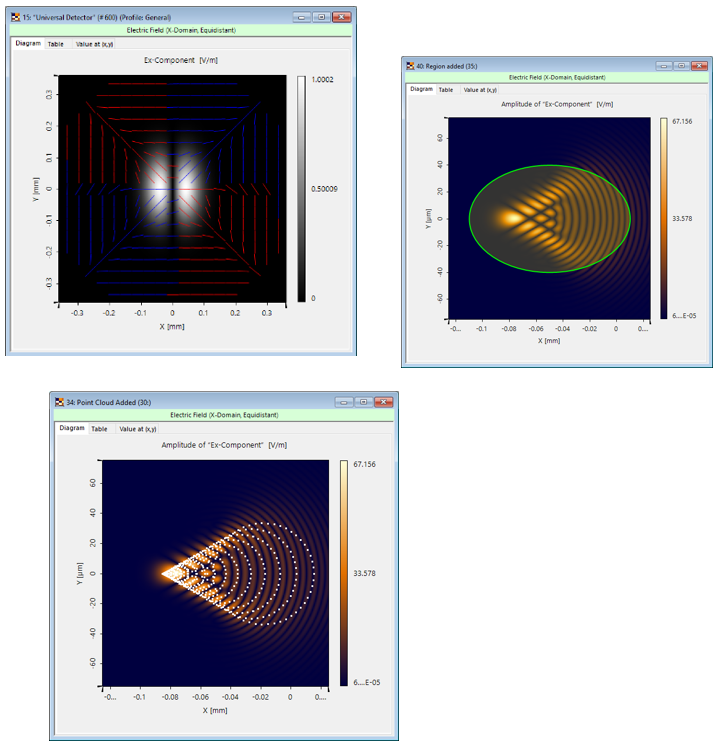 Jrrk�$0H^~ ��*^m�.V�= �#r�L�@��
Graphics Add-ons提供更多视图选择 �
�0>J4O:k t�z�>��X'L
Jrrk�$0H^~ ��*^m�.V�= �#r�L�@��
Graphics Add-ons提供更多视图选择 �
�0>J4O:k t�z�>��X'L • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
'Z%�aB��CM • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
r/w@Dh]{_ • 图像组件提供了多样化的配置选项。
p_�y*-,W
( Pg}G4L?H;J 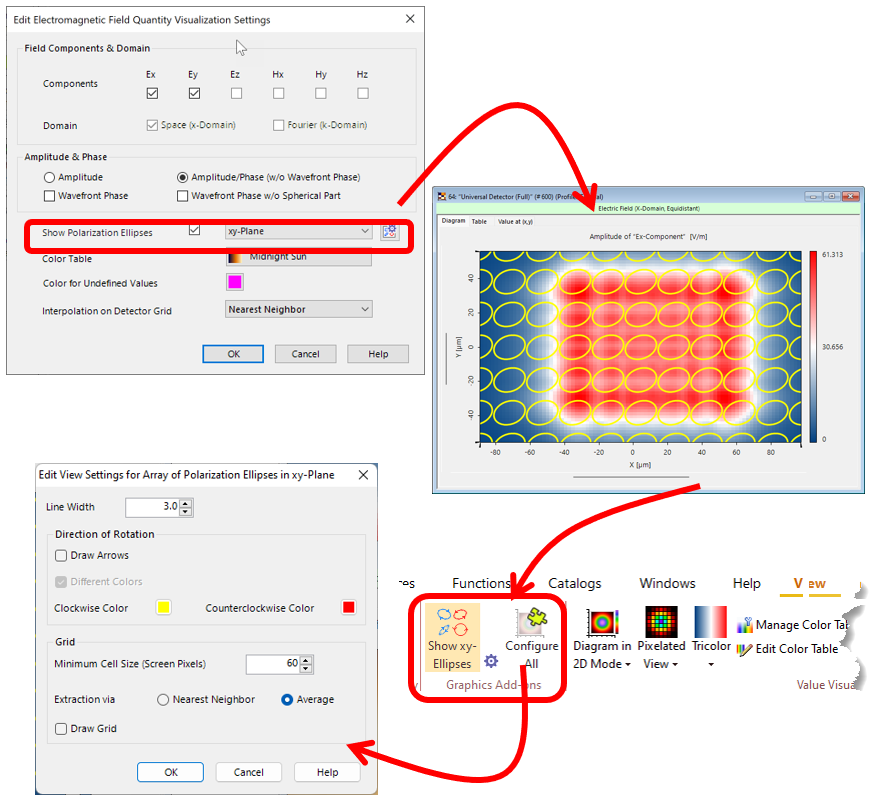 ��&l�)v'�� 8U��$�U�I� �>~r@*�gml Graphics Add-ons: 增加了 Point cloud 功能 uy28�=B��E %=>x�zP(z� z�T�zG&B-�
��&l�)v'�� 8U��$�U�I� �>~r@*�gml Graphics Add-ons: 增加了 Point cloud 功能 uy28�=B��E %=>x�zP(z� z�T�zG&B-� • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
k3eN;3#��& 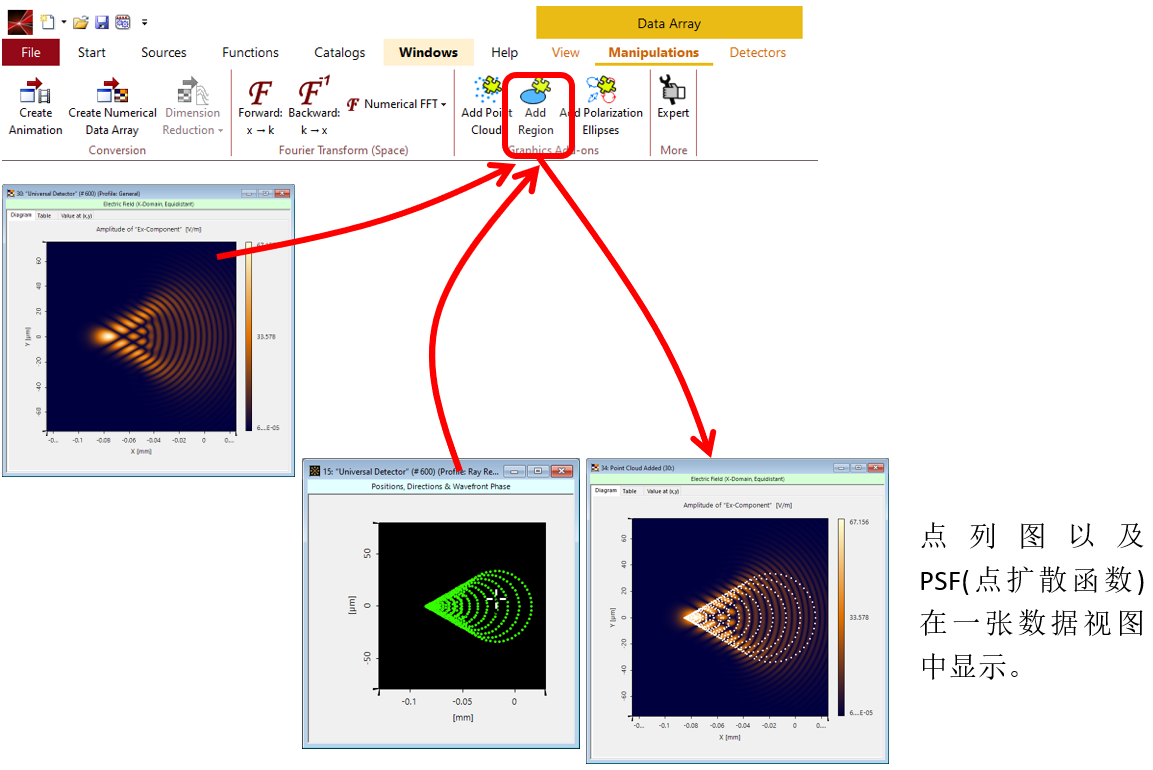 ^�Rh��~�+ aYX�'&�k
` VirtualLab中的区域 (Regions) `
R�-n��p_ DdW8~yI��& Z@Z`8�M@Q,
^�Rh��~�+ aYX�'&�k
` VirtualLab中的区域 (Regions) `
R�-n��p_ DdW8~yI��& Z@Z`8�M@Q, • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
=I3U.�^�: 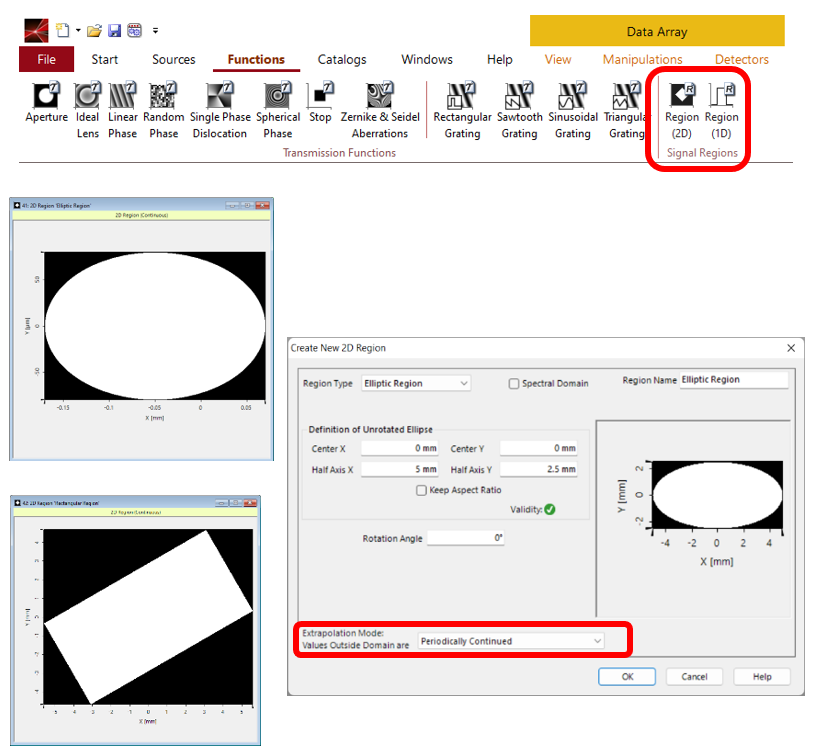 ;���qQz��F %}MM+1eu�� %�zV��v3p: Graphics Add-ons: 添加区域(Add Region) yr D�Yw� T \M^4Dd�A�y �B�Aed� �[
;���qQz��F %}MM+1eu�� %�zV��v3p: Graphics Add-ons: 添加区域(Add Region) yr D�Yw� T \M^4Dd�A�y �B�Aed� �[ • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
�rx)����Q] 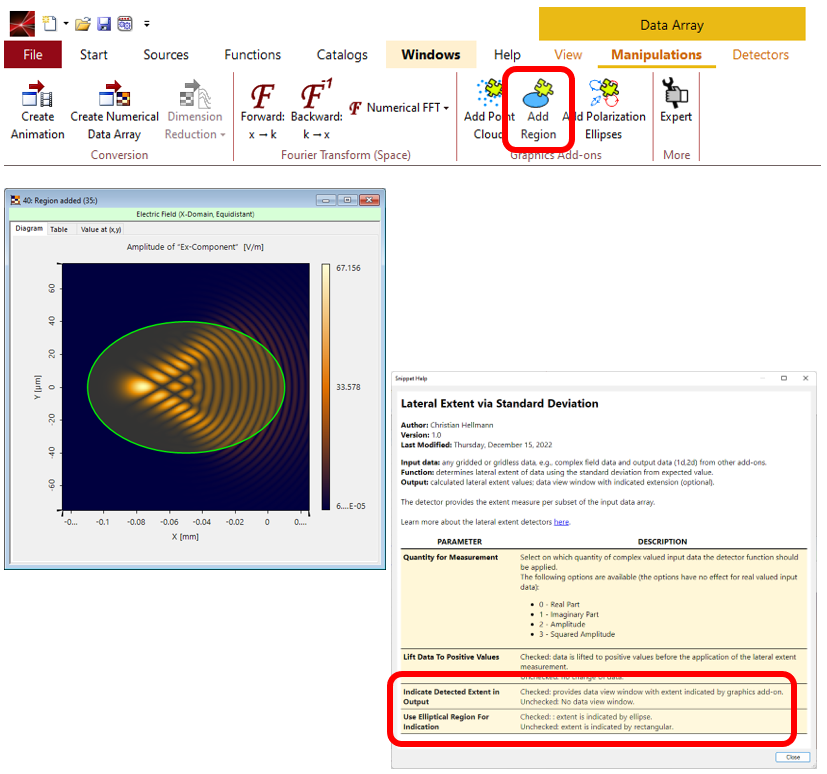 �UYLI�>XSd %-1-J<<J
q
�UYLI�>XSd %-1-J<<J
q 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
WW�z�ns[$f 2o}FB�\4^i Graphics Add-ons: 添加区域(Add Region) `{;&Q�cg6m ZP�FT�Nwf�
K~�N[^p�F • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
W u{��n�C �mjc:0�hH� 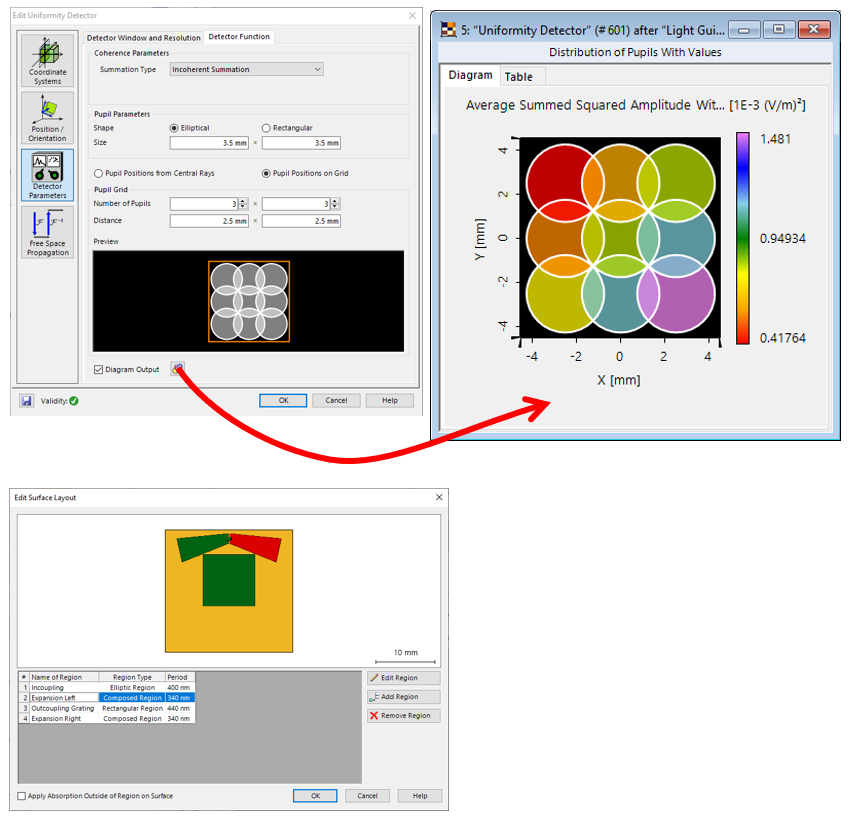 J~�6*d,Ry`
J~�6*d,Ry` • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 G7xjW�6^�T !y0
O['7�� !I$RE?7eY� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
dRC+|^�rSC • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
��'S>�Jps@ 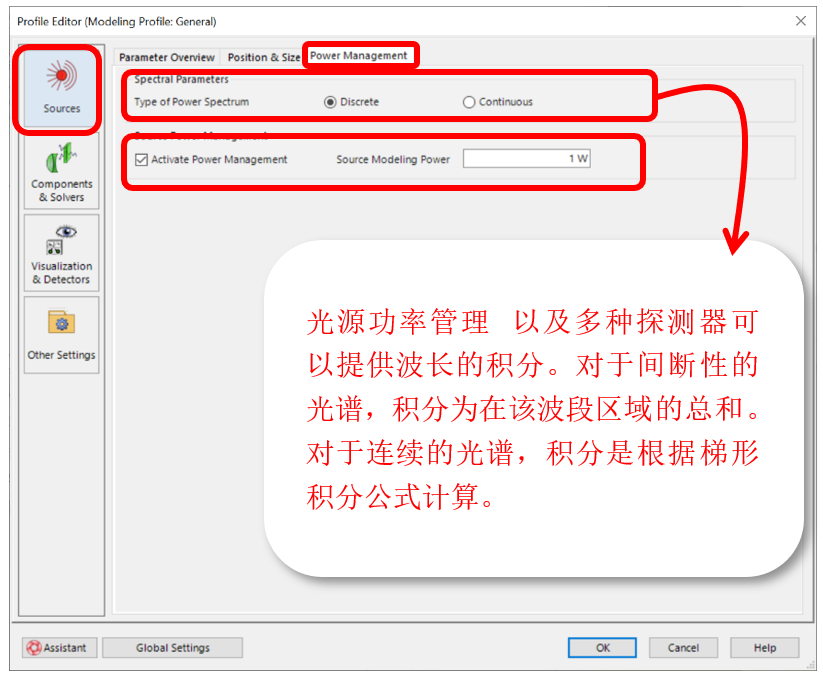 !9Ni[8&Fg0
!9Ni[8&Fg0 • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
&WS%�sE{p_ 1. 针对给定光源参数,进行光源功率的评估。
< du��M8�� 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
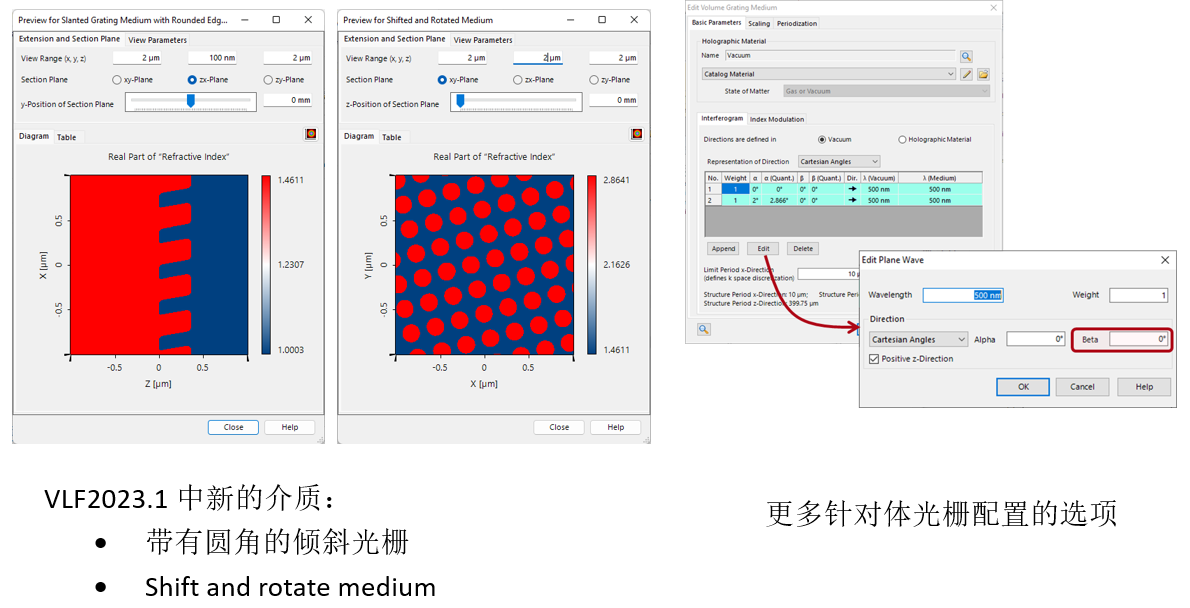
�1��.�CYs< b�&&�'�b�) 组件 breV�TY7 S 组件(Component)新的特征 ~�0:c{�v;4 c��V,URUD� �e�pe}^P�l • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
�]>j�_
Y�, 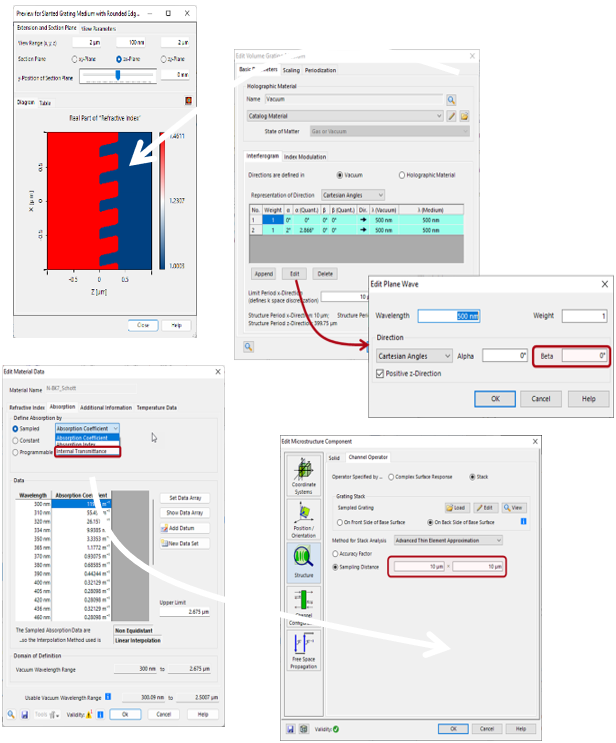 �53��xq%�� cFo�-N�I2� 组件(Component)新的特征 '!GI�:�U+g
�53��xq%�� cFo�-N�I2� 组件(Component)新的特征 '!GI�:�U+g
Wb$bCR�#?<
 }R(�_^�@�]
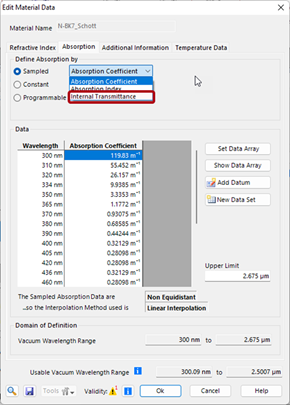
}R(�_^�@�] 吸收特性可以用采样数据定义吸收率以及透过率。
ObnB6S�hKi "[��,��XS` 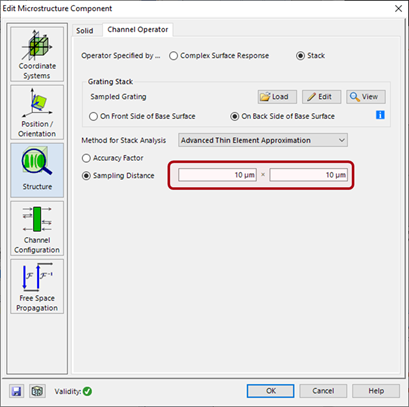 g Q�^]/�X j�e�NEC&�J
g Q�^]/�X j�e�NEC&�J 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
<#Dc(VhT� �^\;5O�(�9 组件(Component)新的特征 �nIT=/{oyi
MR: {�Ps&,
 �p5ihuV,�� $tJ�J�
>"� 组件(Component)新的特征 3._fb�AN%e
�p5ihuV,�� $tJ�J�
>"� 组件(Component)新的特征 3._fb�AN%e
igC��tq!.a
 L �x&ZWF�$ id��dT�. � 组件(Component)新的特征 nz�+KA�\iW
L �x&ZWF�$ id��dT�. � 组件(Component)新的特征 nz�+KA�\iW
�G@2M�&0'
 :7zI!�ed�u .�Dz� /MSl bv��0 %{u&
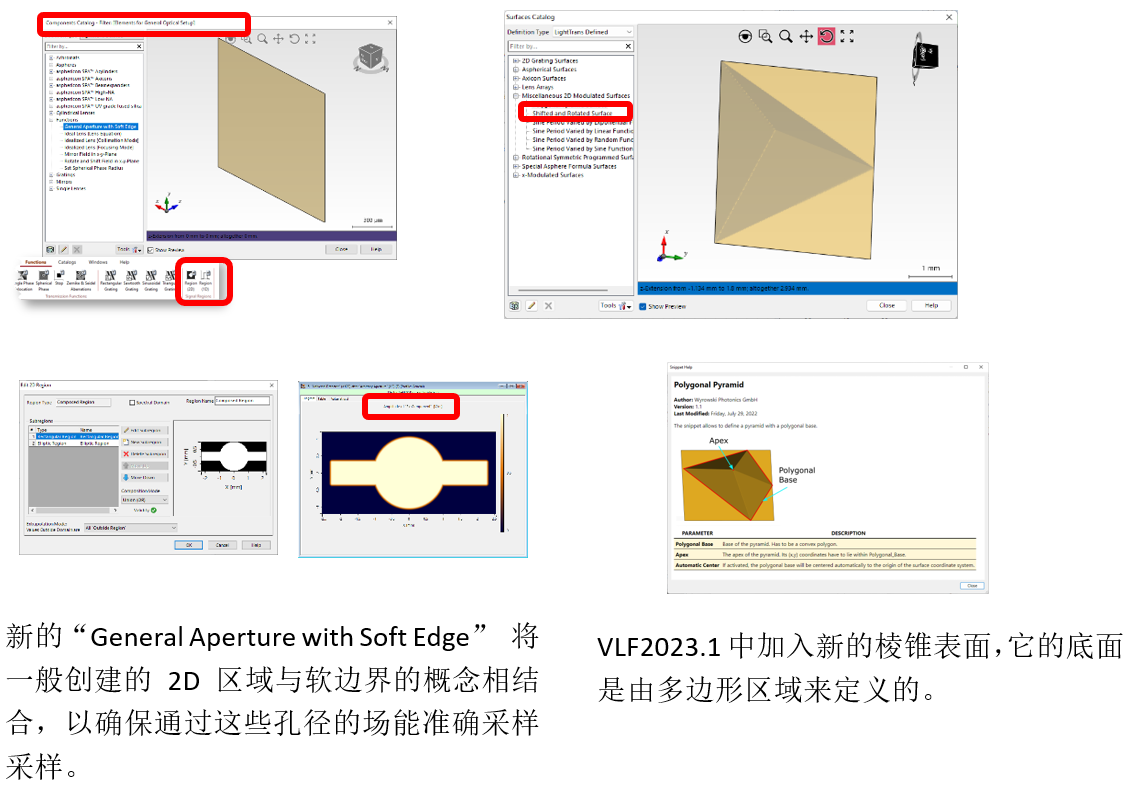
:7zI!�ed�u .�Dz� /MSl bv��0 %{u& 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
x~�.U�,,�1 处理日志 8V=���o%[t 7�y3; �F7V 扩充版的处理日志 _BV:i��:z� �a6OT2B��� ,#��6\:�i� • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
3&�
$E���� 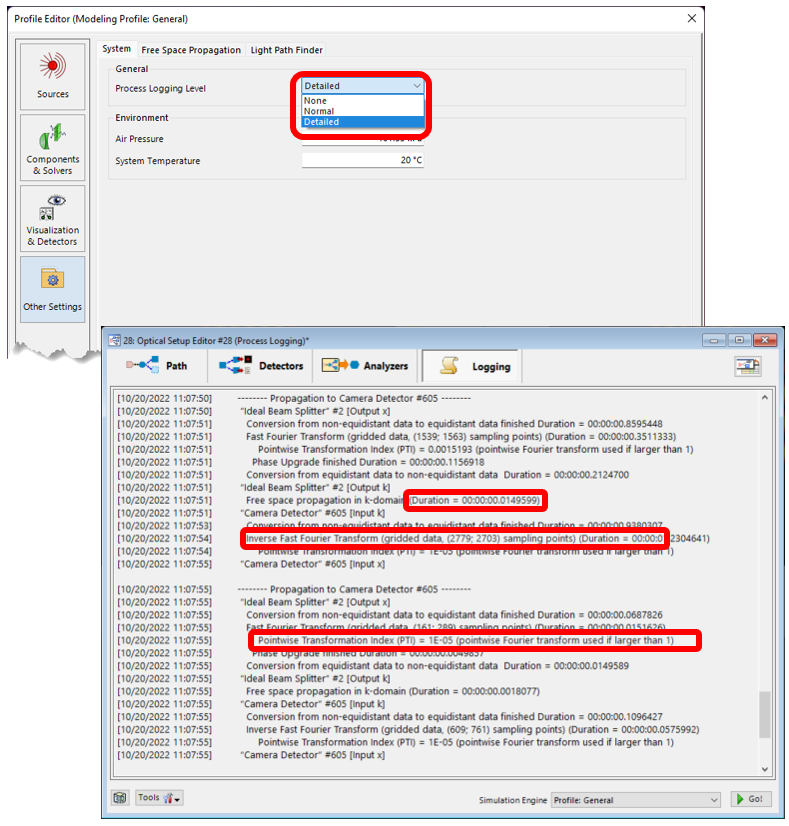 h9mR+ng*oD �AseY�.��0 系统仿真分析 .[�!�
^�L� z m%\L/�BF
h9mR+ng*oD �AseY�.��0 系统仿真分析 .[�!�
^�L� z m%\L/�BF • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
U��;�/� )V 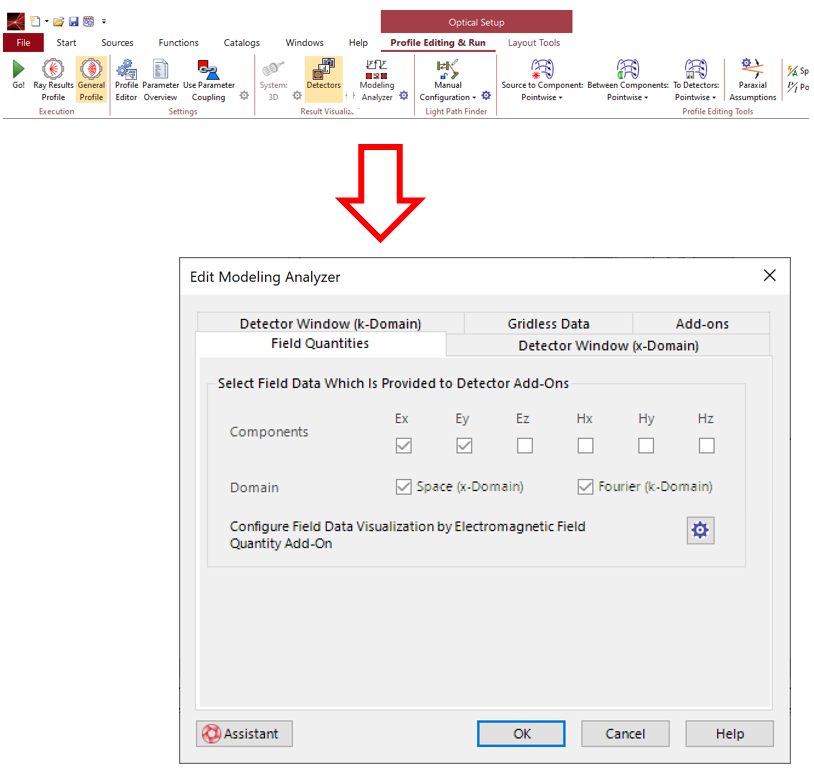 pY�@+.V`�a �W�*2SlS7� 专家模式(Expert Modus) Pa*yo:U'h� ~Q0}>m�,S 专家模式中的数据阵列’Manipulations’ S/|8'�x�{< bYfcn�]N�� Sy�b:i�(�Y
pY�@+.V`�a �W�*2SlS7� 专家模式(Expert Modus) Pa*yo:U'h� ~Q0}>m�,S 专家模式中的数据阵列’Manipulations’ S/|8'�x�{< bYfcn�]N�� Sy�b:i�(�Y • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
Fk�\xq`3'c 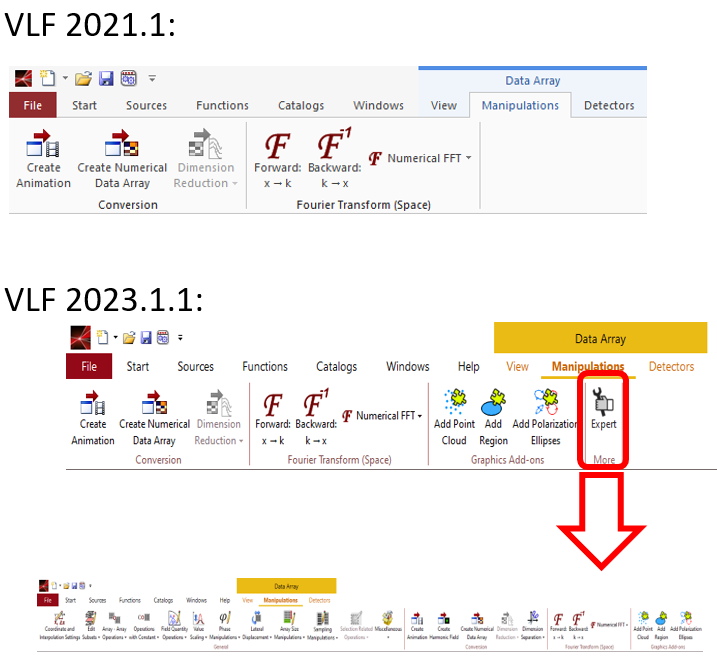 s.U�� p<Rw m,��b<b9�1 微小的改进帮助:新的计算器 /(w5�S',EL �j!l�(ReGb &2D����W
s.U�� p<Rw m,��b<b9�1 微小的改进帮助:新的计算器 /(w5�S',EL �j!l�(ReGb &2D����W • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
U+z&jdnhDR 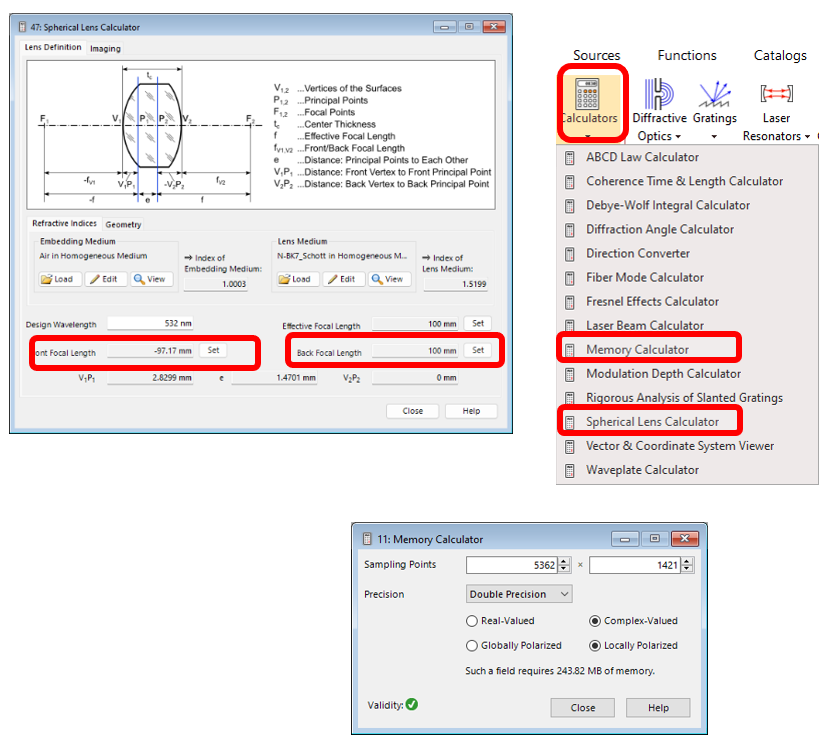 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



