2022 年 12 月,发布 VirtualLab Fusion 2023.1 �eveGCV�;@ VirtualLab Fusion 2023新版本更新内容(三) V"":_�`1VW 2023.1版本新特性一览 Z-�[�nHS�f DF �D5">g@ 基本信息 LL�3R�C6;e
Kp,}7%hDw!
 �k�1;,�eB�
�k�1;,�eB�  �<j�d�S0YT
�<j�d�S0YT VirtualLab Fusion 2023.1新版本
主要更新方向 G"!YV�#"~
 - �bL�
7M5
- �bL�
7M5
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 ?�m-k�pW�8
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: �L8-�����
- 更快的速度 ���[{3WHS.
- 更容易使用 ]P/�eg$u'I
- 融合更多物理光学模型 G#V5E)Dx��
- 更高的透明度 ��5wX��e^G
- 多元的仿真控制选择 7kpCBLM(�}
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 1lRqjnzve&
N{n}]Js1D-
a(CZG��IB
功能概述(以下为更新内容的详细解释和案例展示): x)��<5f|�j
数据视图 K�LBV(�`MS
��/bA�\O
� VLF 2023.1数据视图 Sd�'Meebu� lh�`inAt)" 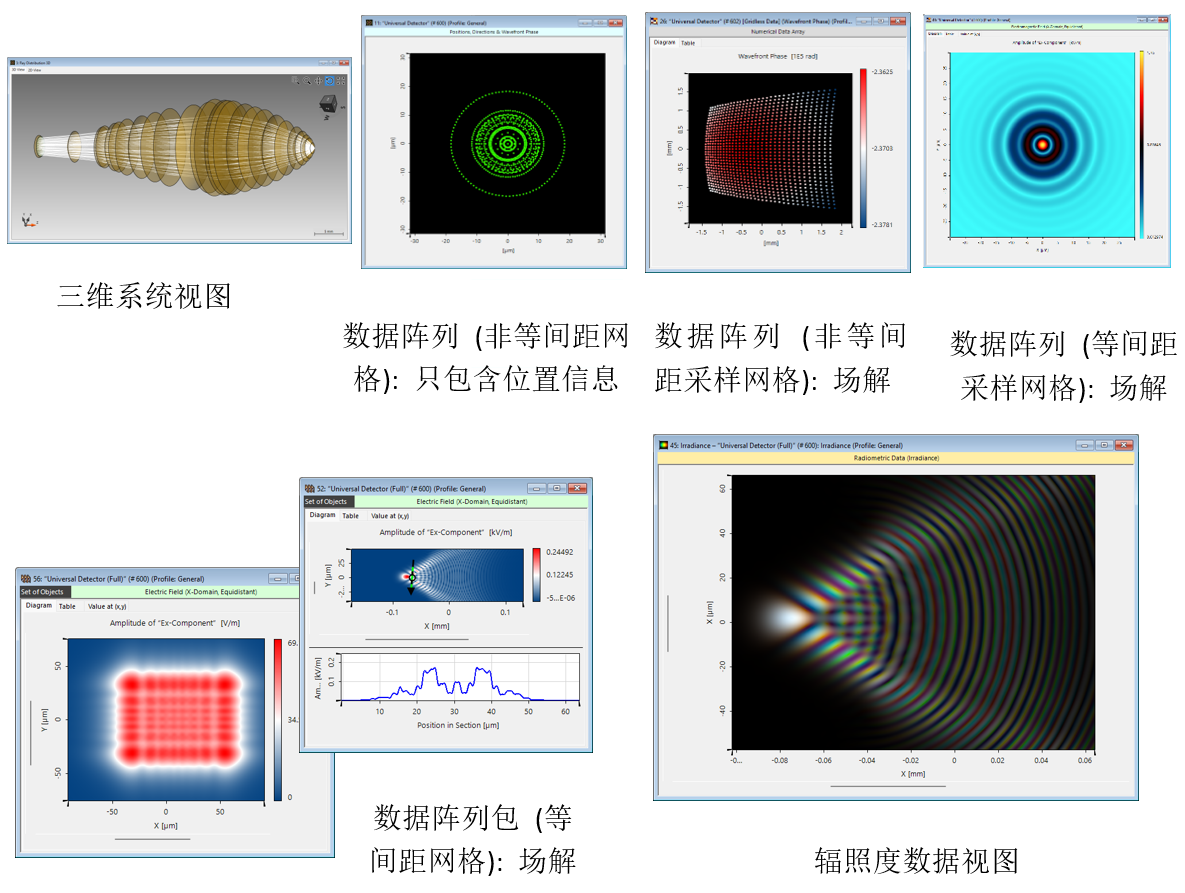 kfb+OE:7�� Gjuc"�JR7 VirtualLab Fusion 2023.1数据查看方式 i gz�ISYC_
kfb+OE:7�� Gjuc"�JR7 VirtualLab Fusion 2023.1数据查看方式 i gz�ISYC_
Y�{y #u�s1
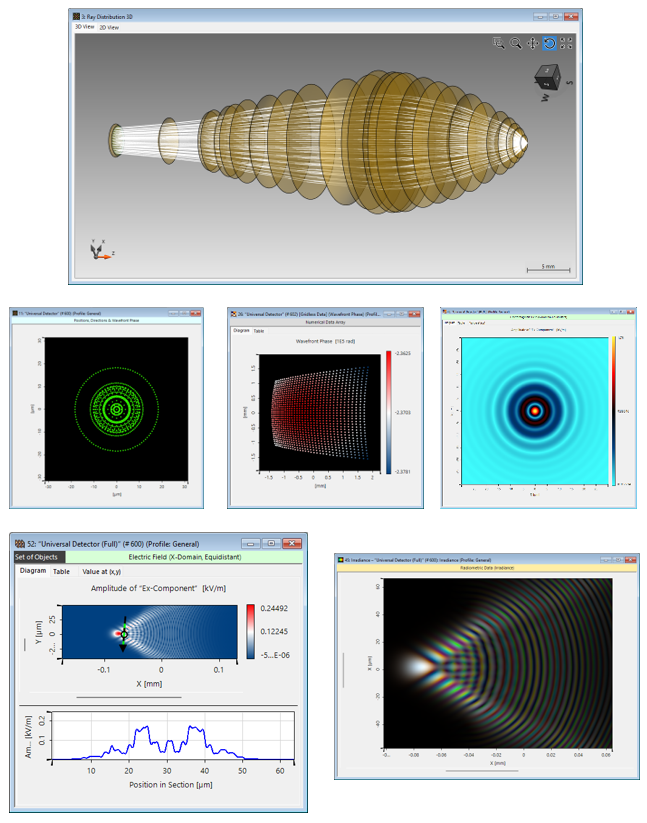 bu"Jb4_a>� �2�c�fzLW( 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 }i_[wq{�E& 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ~D@p��k�>I 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 ���F�= �� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 :�4$�Ex2 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 S8j;oJ2�d
bu"Jb4_a>� �2�c�fzLW( 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 }i_[wq{�E& 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ~D@p��k�>I 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 ���F�= �� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 :�4$�Ex2 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 S8j;oJ2�d
.Ubm�U^�y|
Ne/jv�WW�N
三维系统视图: 新的对话框以及设置选项 ,�u QLXF2�
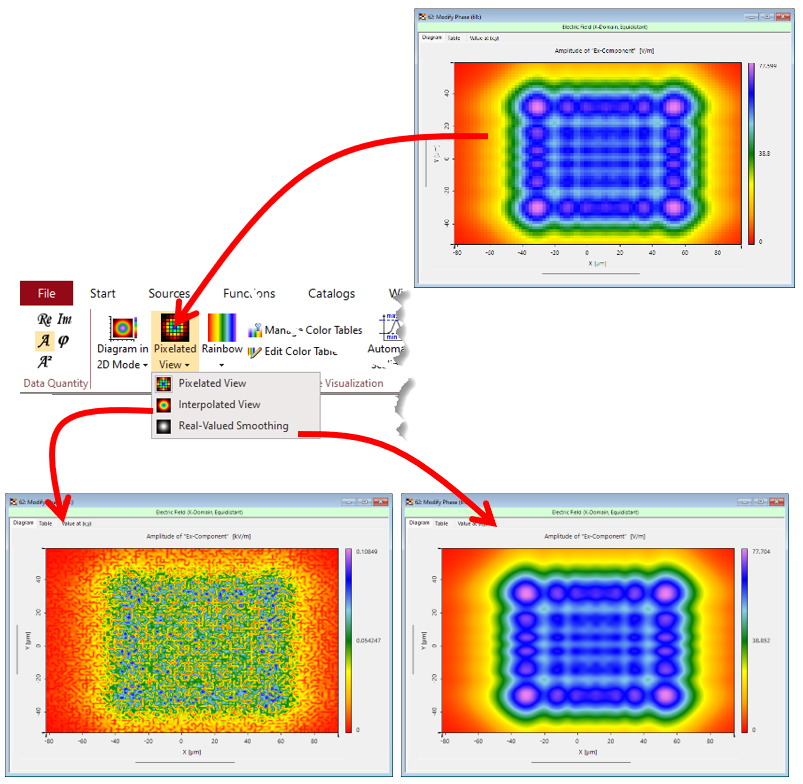
��W.p�->,N 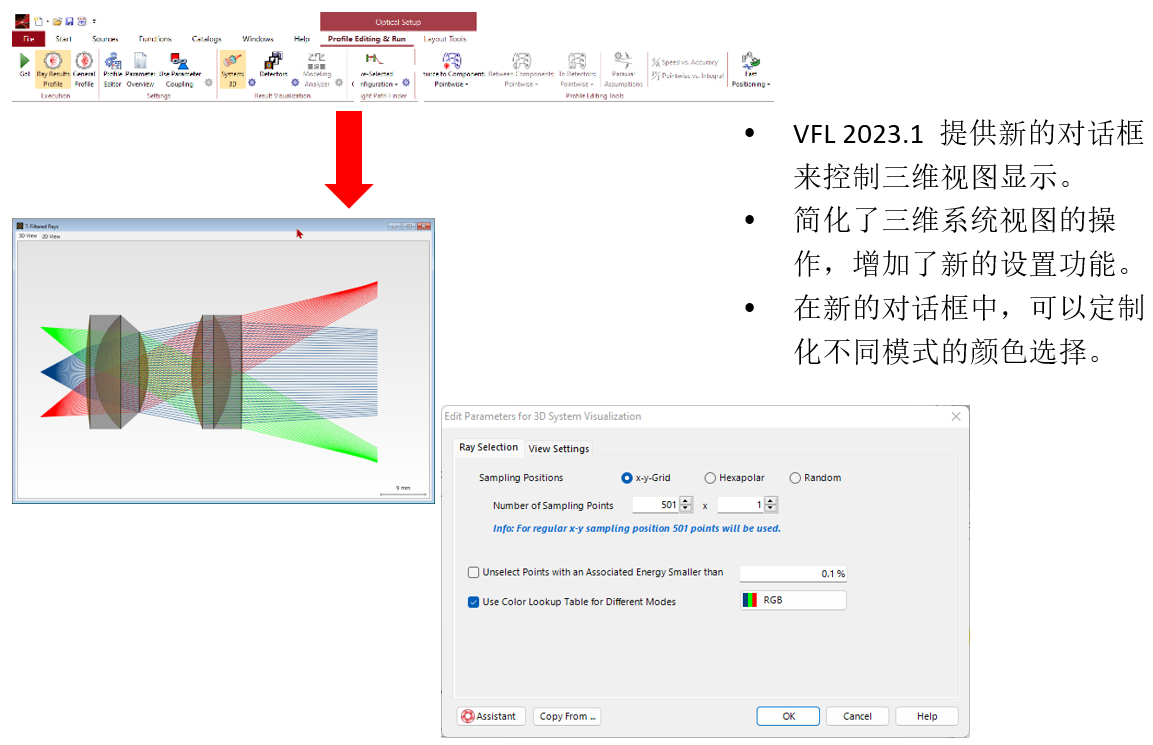 %o<�&O(�Y 2a*1q#MpAt 数据阵列视图: 像素数据(Pixelated Data)平滑 ]!H*oP8�a* %kD WU�JZ • 探测器中的像素越少,探测器评估速度更快。 �KmV#%�
d� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 Y>�!9P\X�e • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 W#'c�6Hq2c 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �Y5L�ESZWo
%o<�&O(�Y 2a*1q#MpAt 数据阵列视图: 像素数据(Pixelated Data)平滑 ]!H*oP8�a* %kD WU�JZ • 探测器中的像素越少,探测器评估速度更快。 �KmV#%�
d� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 Y>�!9P\X�e • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 W#'c�6Hq2c 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �Y5L�ESZWo
{neE�(0c
 O�B3AZ�H�$
O�B3AZ�H�$
L.(�T�"`-i
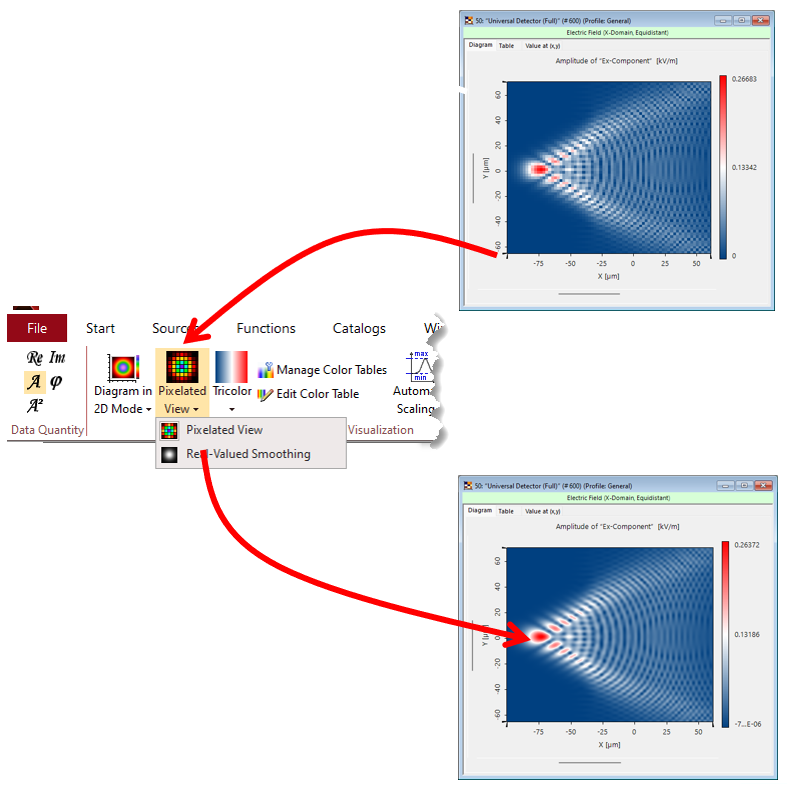
数据阵列视图: 像素数据(Pixelated Data)光滑化 `<����y�[V
`(aU��_r=�
(�]j*�)~=V
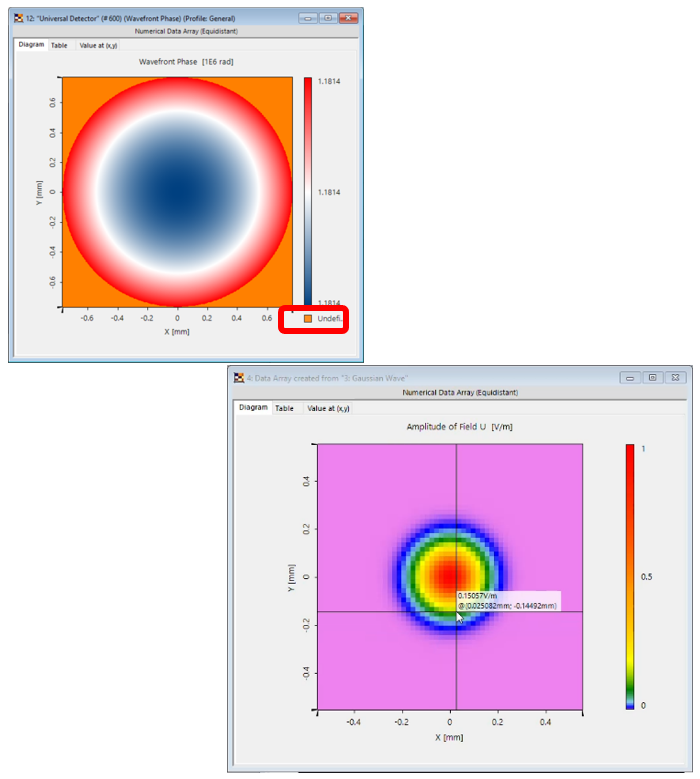
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 uR)i�tm�c?
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 3�hR�7 .�/
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 qM@][]j:��
@Fk�N�T~OZ
 ,)��V*�xpp
,)��V*�xpp
���IgE���g
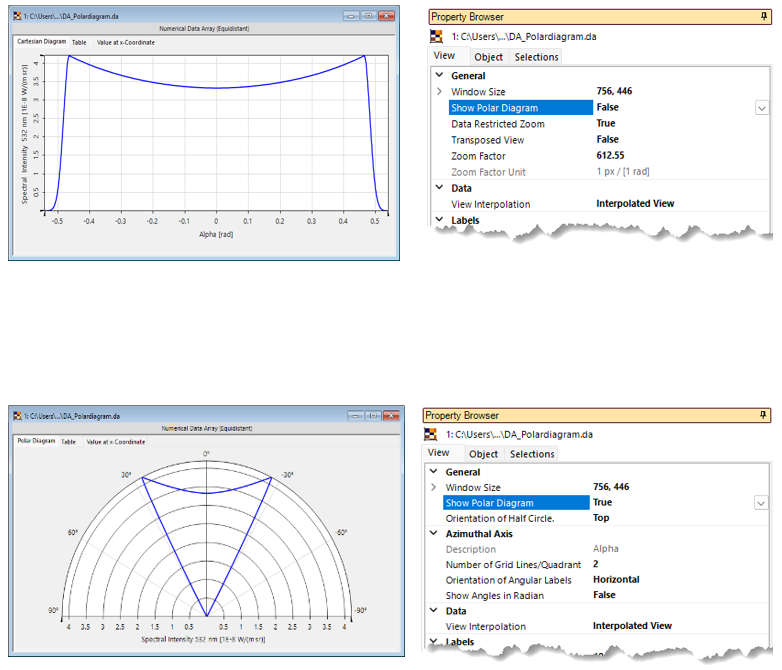
数据阵列视图: 极坐标图(Plolar Diagram) .^#��{�rk
aGp�� <%d • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 8s�8q`_.)( • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 3f�'s>+,#% • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 �3leg,q�d� • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 #f�.@XIt'�
)ACa�0V>*p
 .5�L/����<
.5�L/����<
u�!g=>zEu
数据阵列视图:找寻以及点的标识 �8q7K�qYu�
c%pW�'�UE&
O~��d!*�A
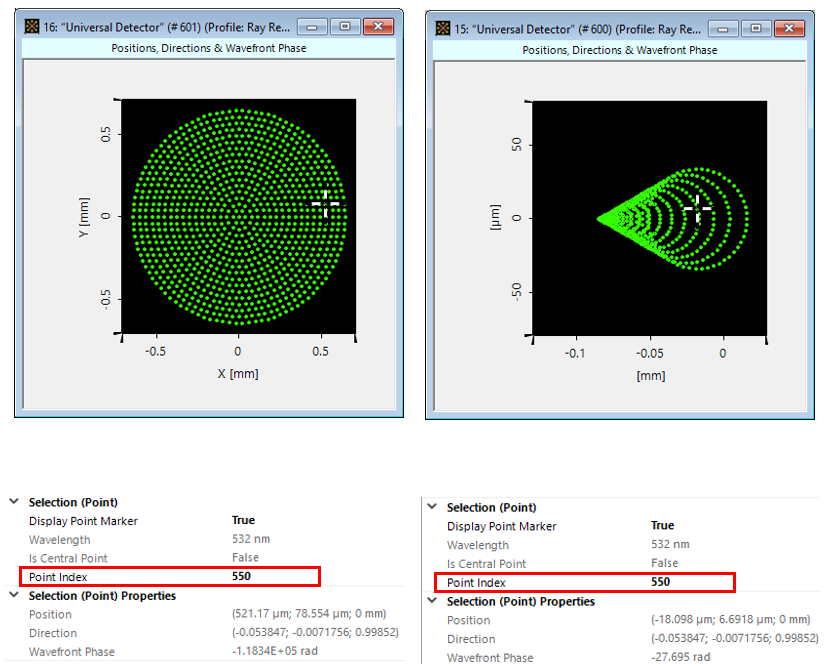
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 ~2@�U�85"o
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 T'X�A�cH��
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 f]T1:�N*t�
G+[>o�r��}
 R ;5w*e}?5
R ;5w*e}?5
\+G�XU�nkj 导出图像的概览 ~\<�ZWU<BE #�2yOqUO\� �B>X+��eK�
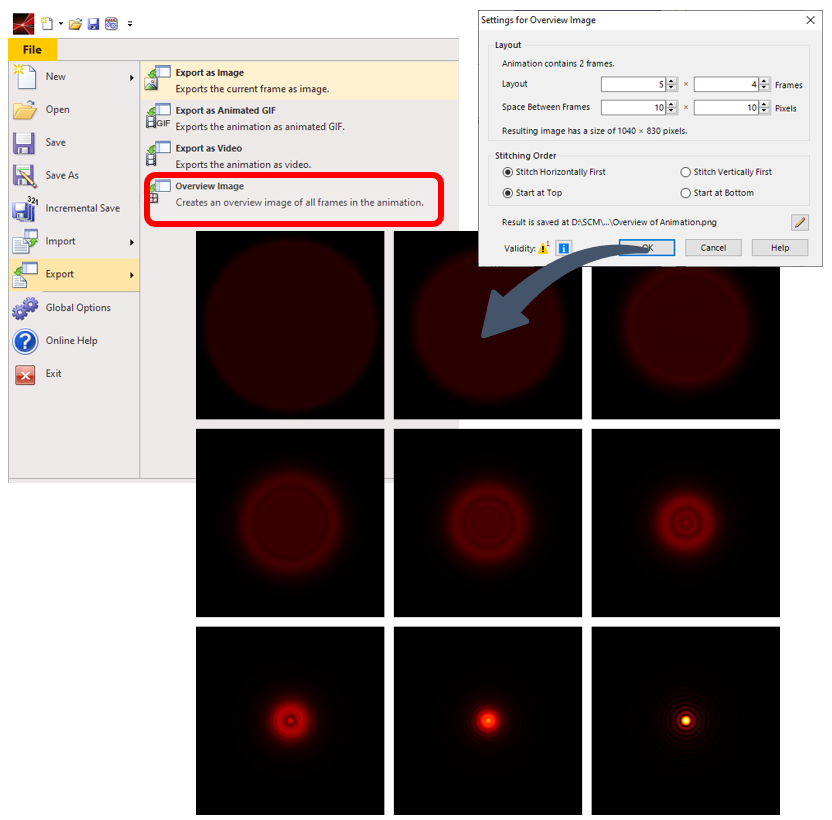
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 ���T<zonx1
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 MBcOIy[&A�
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 g/z9bOgIX� 1:Y�D�N.*
 U
YUI��p�e
U
YUI��p�e
�Zpb�3>0<R
数据阵列视图: 更多的新功能 4)Pt�]#T�i
q(.%f��3�(
EUu�M�S�Dp
• VFL2023.1可以对未定义区域填充不同的颜色。 �$��6!`���
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 }WI24|`zM
.�e.vh:S�z
 I4|p;\`fK�
I4|p;\`fK�
�9U�}E�VpD
Graphics Add-ons提供更多数据视图选择 �r@%3�2��h m$LZ3=v�%8 =Bo0O���ei
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 )CR8-z��1`
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 qWE�"vI22M
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。
L$�jyeFB5 ,7%�(Jj$
^  vy|}\%*r�~ fE7WLV2�I> pNiqb+^�nz Graphics Add-ons提供更多视图选择 :L`z~�/�6� 2DV�{�g�F�
vy|}\%*r�~ fE7WLV2�I> pNiqb+^�nz Graphics Add-ons提供更多视图选择 :L`z~�/�6� 2DV�{�g�F� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
gP1$�#K�gU • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
3&' STPpW� • 图像组件提供了多样化的配置选项。
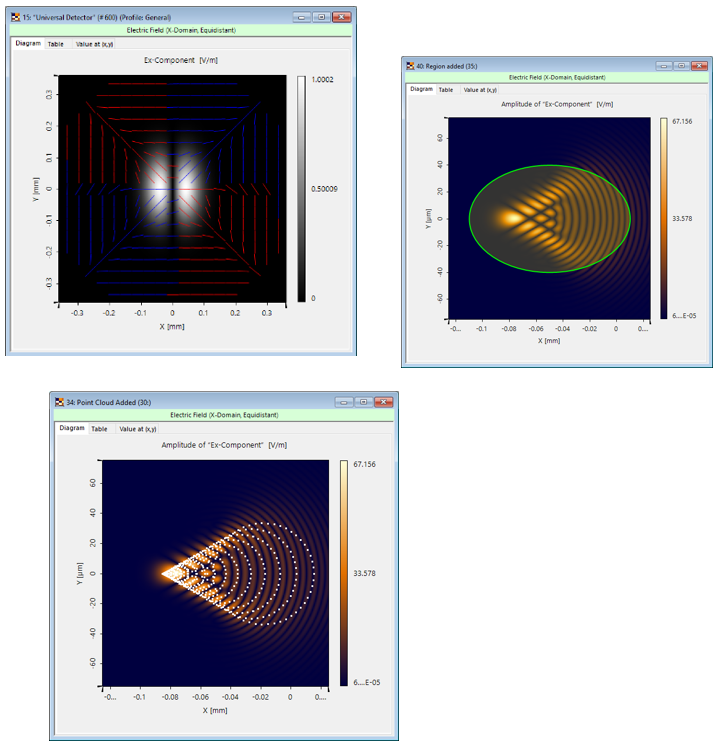
Z,i�kl�B�- v?LJ_>hw*T 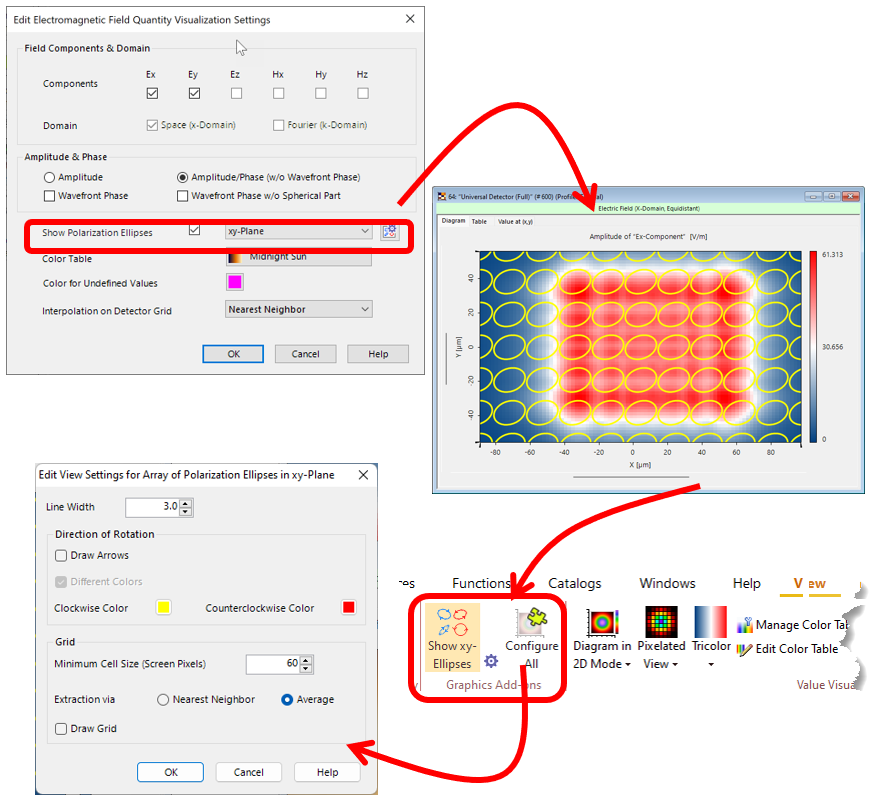 K=(&iq!V�O a}>��GQu*y M$&>"%��Oi Graphics Add-ons: 增加了 Point cloud 功能 ?�N|PgNu X fs)O7x-�B( R*yB�);�p
K=(&iq!V�O a}>��GQu*y M$&>"%��Oi Graphics Add-ons: 增加了 Point cloud 功能 ?�N|PgNu X fs)O7x-�B( R*yB�);�p • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
?��,���%N? 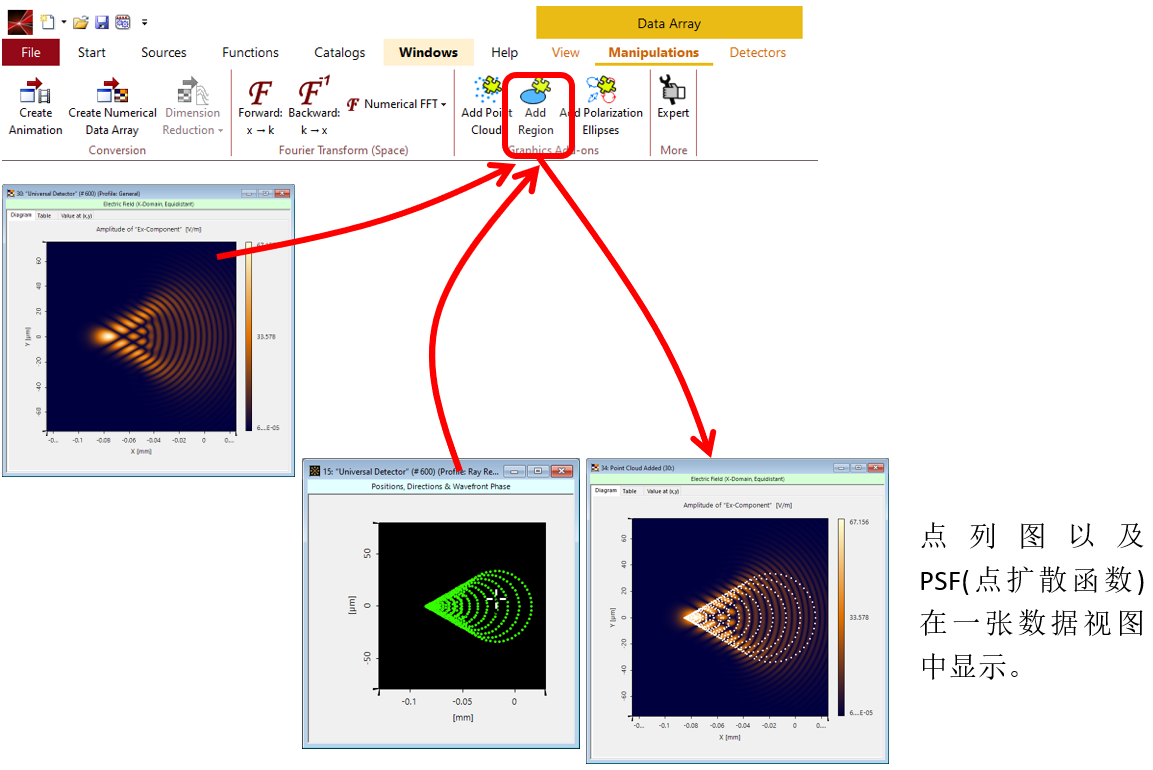 !�h4�So�4p �b/5~�VY*T VirtualLab中的区域 (Regions) UVI=&y]c,p Y�hsb�$w�u .FMF0r�>l
!�h4�So�4p �b/5~�VY*T VirtualLab中的区域 (Regions) UVI=&y]c,p Y�hsb�$w�u .FMF0r�>l
• 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
_v�$mGZpGY 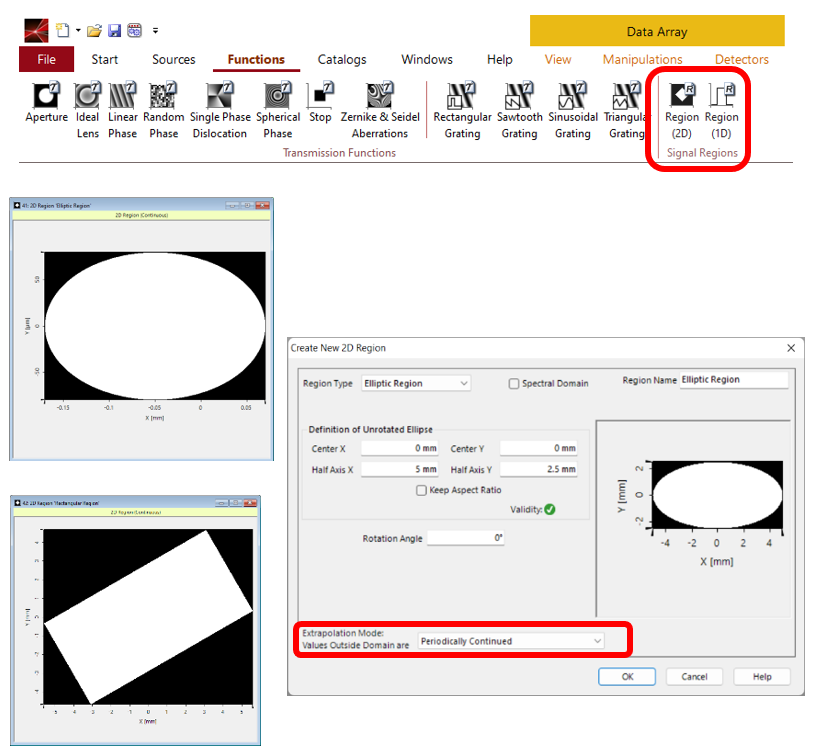 7��L<oWAq� k�2+Z7#2�n �A,=l9hE'� Graphics Add-ons: 添加区域(Add Region) QM���_~w�\ *@B�Bl�kcx fV5#k@,"�)
7��L<oWAq� k�2+Z7#2�n �A,=l9hE'� Graphics Add-ons: 添加区域(Add Region) QM���_~w�\ *@B�Bl�kcx fV5#k@,"�) • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
QiR�zA4-zq 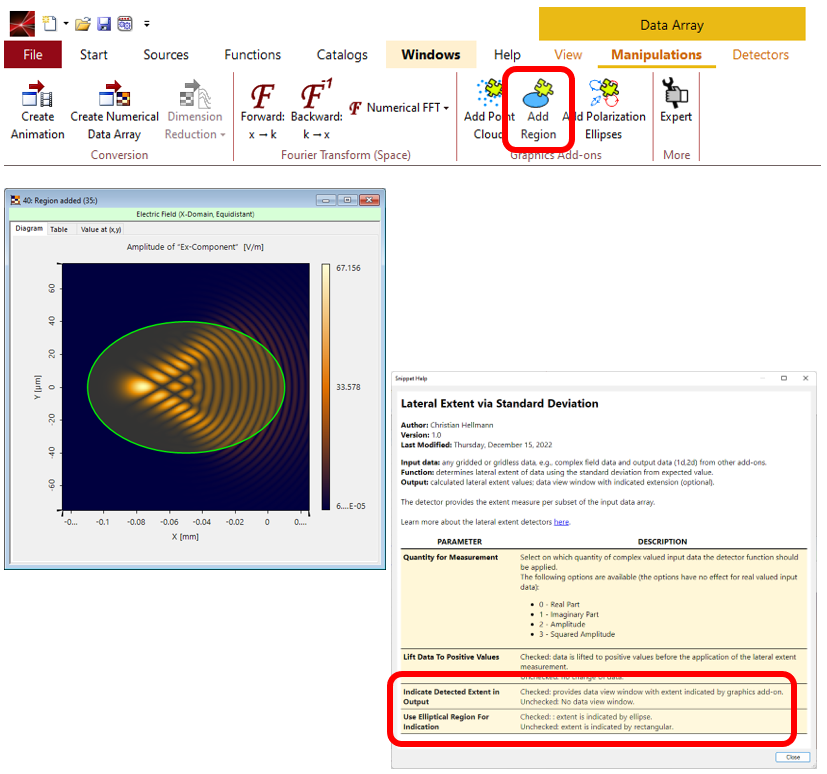 Bf*
�F�^�� ���X@D��3�
Bf*
�F�^�� ���X@D��3� 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
�Ys3C'G�c� ���bg=`
� Graphics Add-ons: 添加区域(Add Region) ;zJ_apZ:{� <s{�/k��a3 zY�s? �w�= • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
CN�N?8/u!@
?P�Qi�V�L 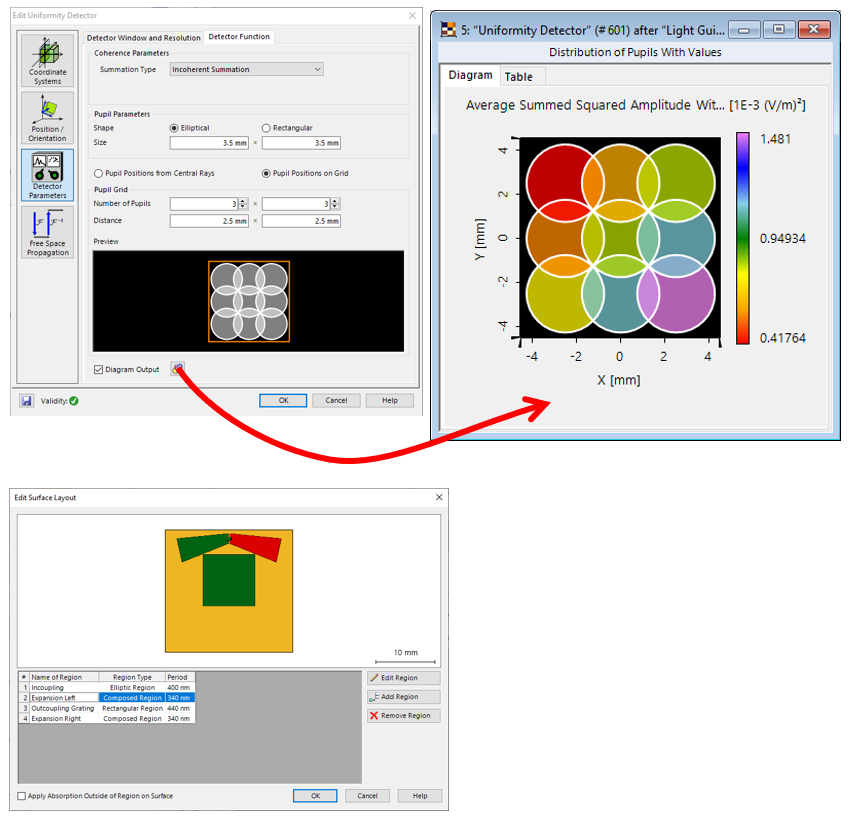 ePY� K^�D�
ePY� K^�D� • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 ?4�1�| e+p �g,W#3b6>j �0WPxzm�Y� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
}`g*p�p�*� • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
0yZw`|Z�h[ 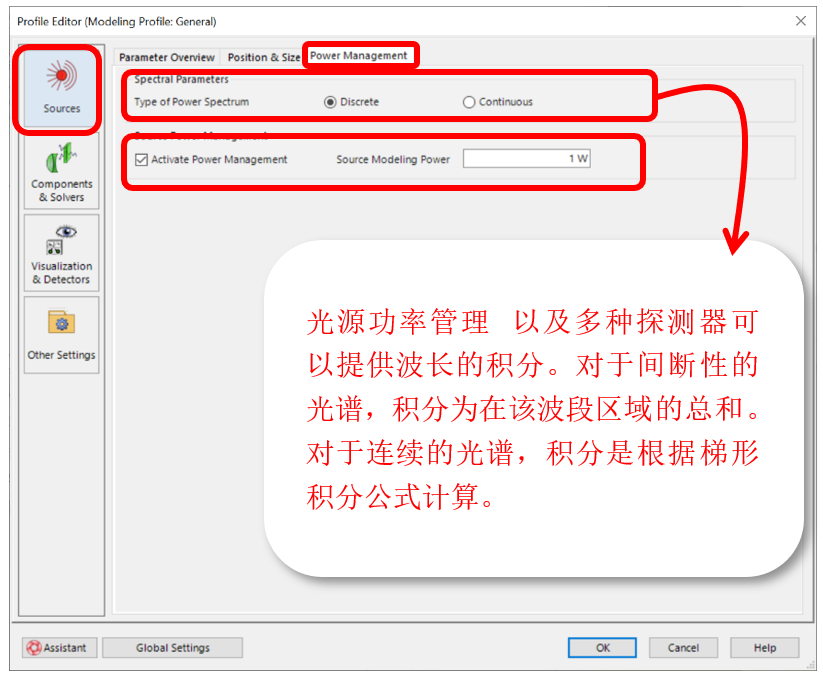 Uis�
P
8/k
Uis�
P
8/k • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
Rd!.8�K[�� 1. 针对给定光源参数,进行光源功率的评估。
$fn��^�i.� 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
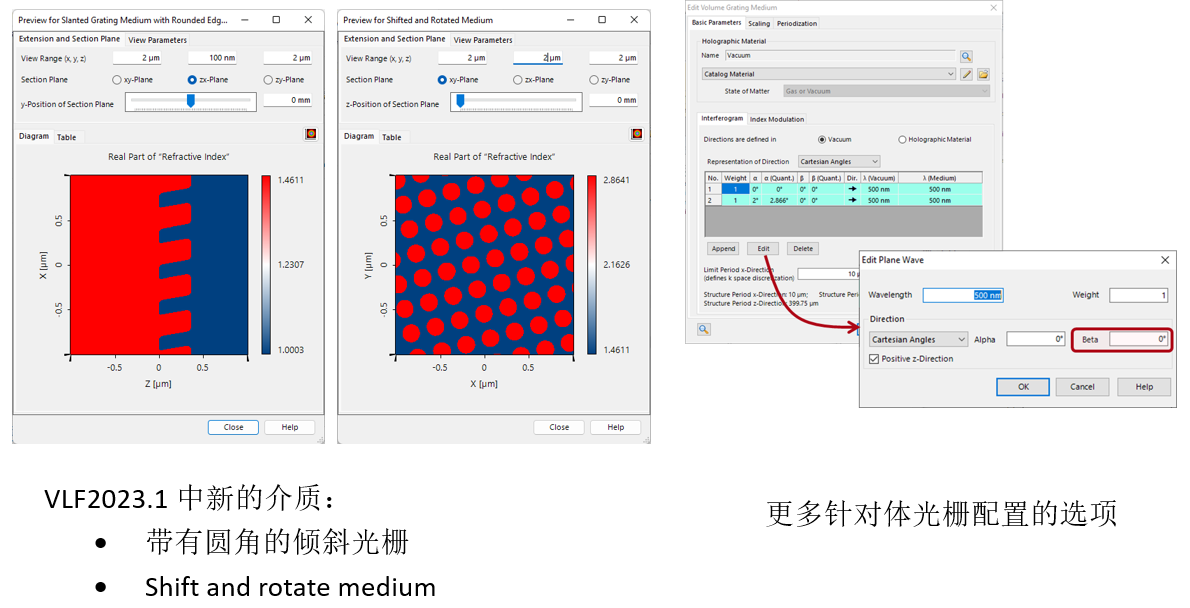
V('b|gsEo ~G�$OY�9UC 组件 \C6m.%%={R 组件(Component)新的特征 G^OSXf5��� JH5])i���0 xAO�]u�[�J • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
�nb�R�g<�@ 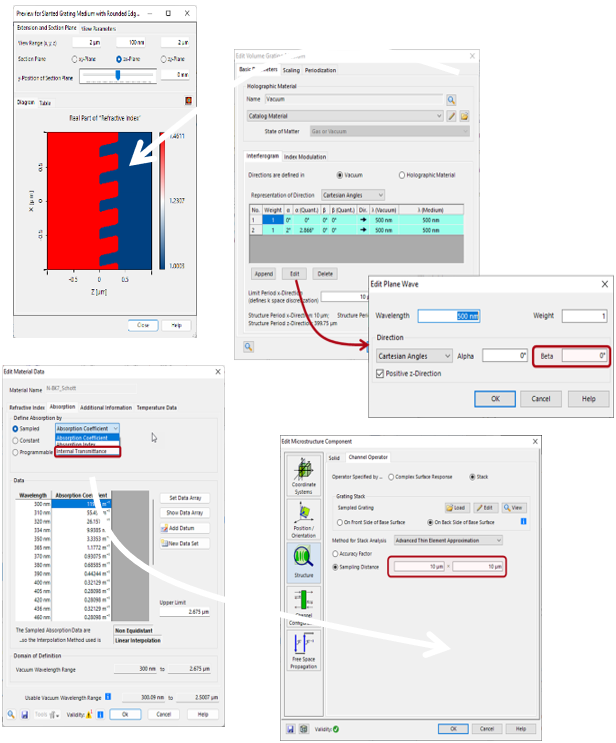 �\G"/My�i q�>X�:z0�H 组件(Component)新的特征 V��,�"'k<y
�\G"/My�i q�>X�:z0�H 组件(Component)新的特征 V��,�"'k<y
�}hf�*Jw�
 s1FBz)yCY=
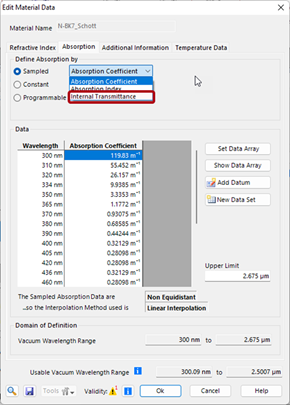
s1FBz)yCY= 吸收特性可以用采样数据定义吸收率以及透过率。
y7Ub~q���U ^�4�9�moC- 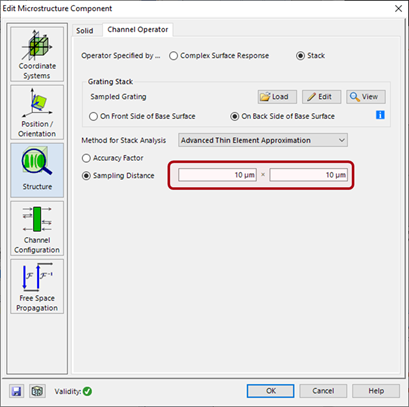 �A�y`a>:p Nl8C�ctrf�
�A�y`a>:p Nl8C�ctrf� 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
t.TQ@c+,J QRj�t.Ry�| 组件(Component)新的特征 ��iU�Kj:q:
W�T)�")0)[
 2u:���j6ic �M#p,Z�� F 组件(Component)新的特征
z�he�5i;M
2u:���j6ic �M#p,Z�� F 组件(Component)新的特征
z�he�5i;M
g:)v�th�Os
 /l`X��J�s� j
AE0$u�~. 组件(Component)新的特征 %q�HT!a�P
/l`X��J�s� j
AE0$u�~. 组件(Component)新的特征 %q�HT!a�P
5 6R�,�+sN
 Rj�u8%F�RO #(H_���w�4 !R�D,:�\5V
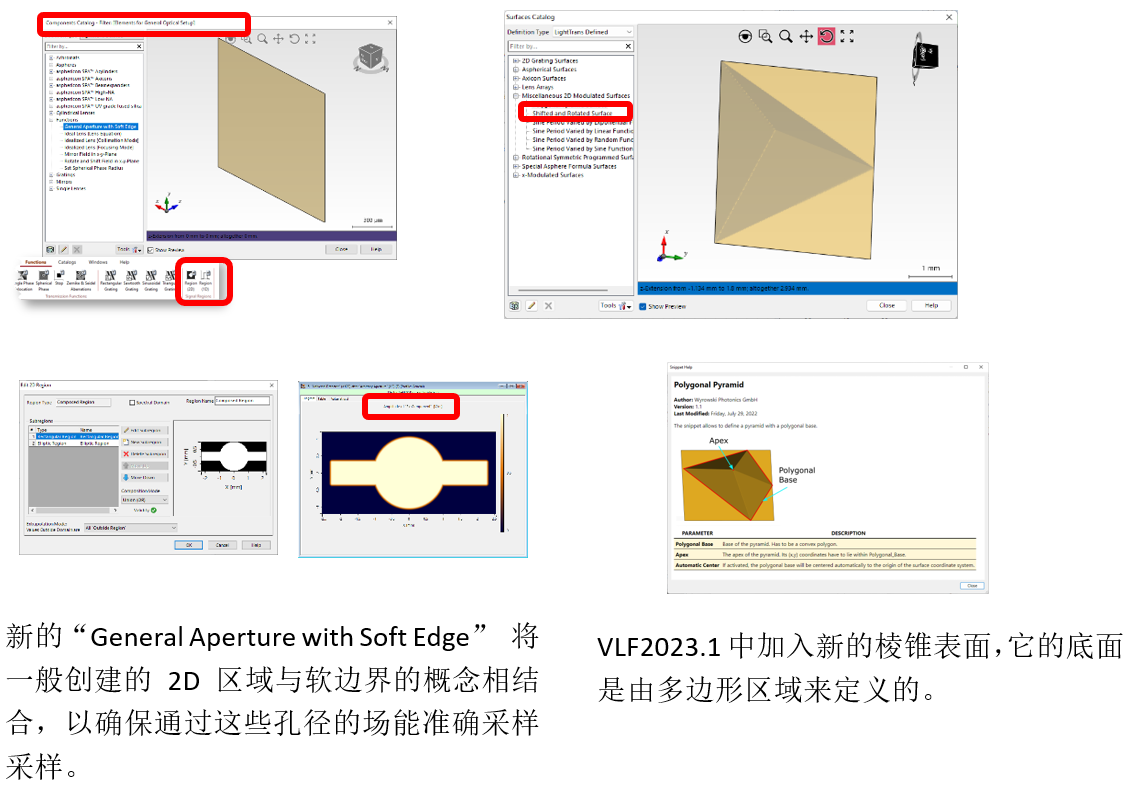
Rj�u8%F�RO #(H_���w�4 !R�D,:�\5V 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
L�KZI@�i)� 处理日志 &|4Uo5qS=Z t<7WM�'2<y 扩充版的处理日志 d7P @_j�O6 "10VN*)J}� w~��&�]gyf • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
�*X #�e�� 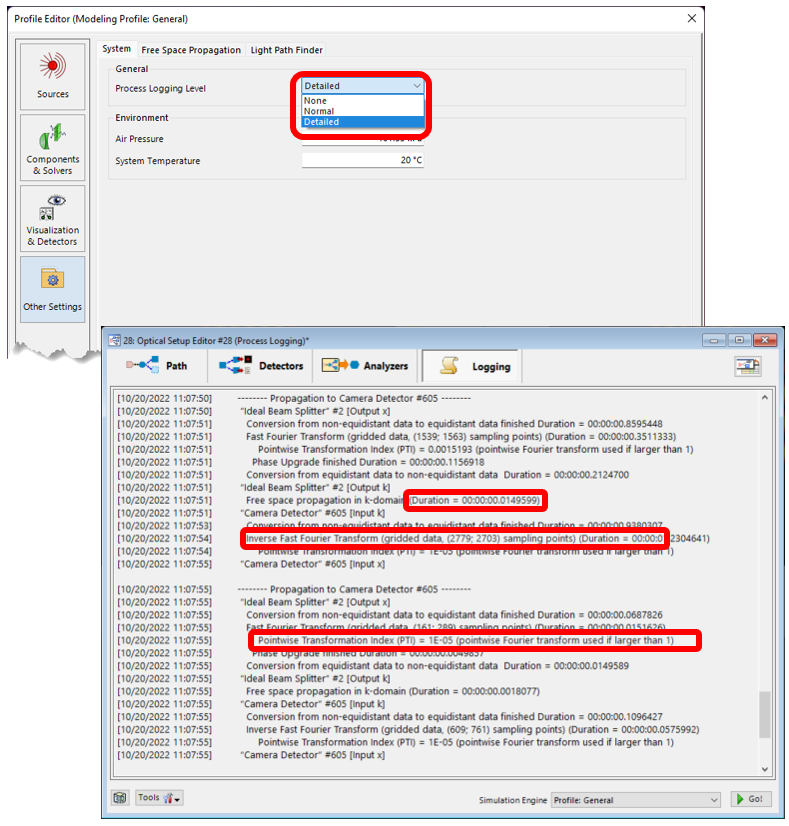 m0,9yY::wj �MD�)"r>k� 系统仿真分析 �O+$70���� �LA+MX��0*
m0,9yY::wj �MD�)"r>k� 系统仿真分析 �O+$70���� �LA+MX��0* • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
$Da^z[�8�e 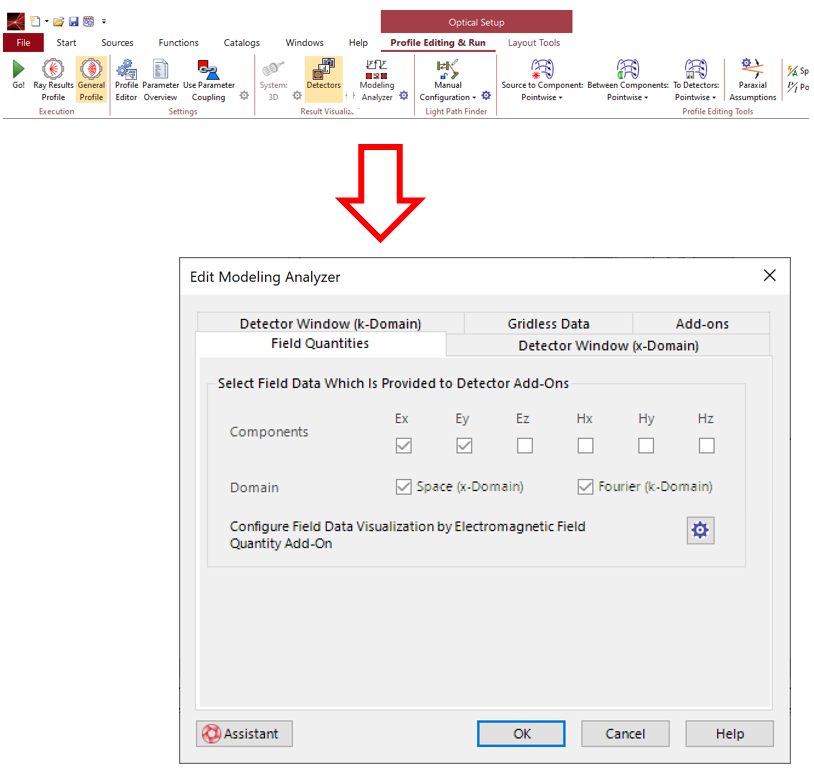 @FV;5�M:I� yd~fC�:_ ] 专家模式(Expert Modus) �{;E/l(HNI -(.7/G'Vk> 专家模式中的数据阵列’Manipulations’ 12�a #�]�E �[
lW
"��M !;gk��e,fB
@FV;5�M:I� yd~fC�:_ ] 专家模式(Expert Modus) �{;E/l(HNI -(.7/G'Vk> 专家模式中的数据阵列’Manipulations’ 12�a #�]�E �[
lW
"��M !;gk��e,fB • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
��o;mIu#u� 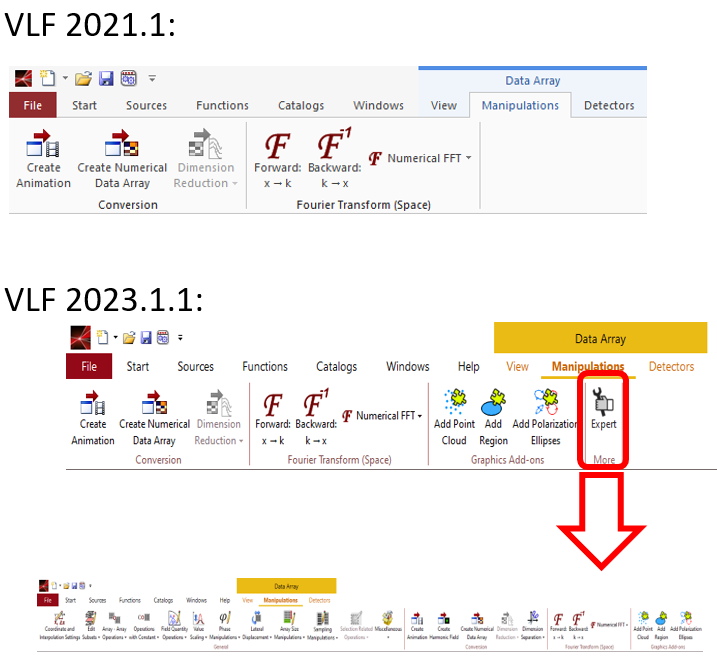 �Q(6(Scp�{ t["Df;�"O 微小的改进帮助:新的计算器 j1��<1D@UO m�=}X$QF`^ \sd��"iMEi
�Q(6(Scp�{ t["Df;�"O 微小的改进帮助:新的计算器 j1��<1D@UO m�=}X$QF`^ \sd��"iMEi • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
q@�9�i3*q; 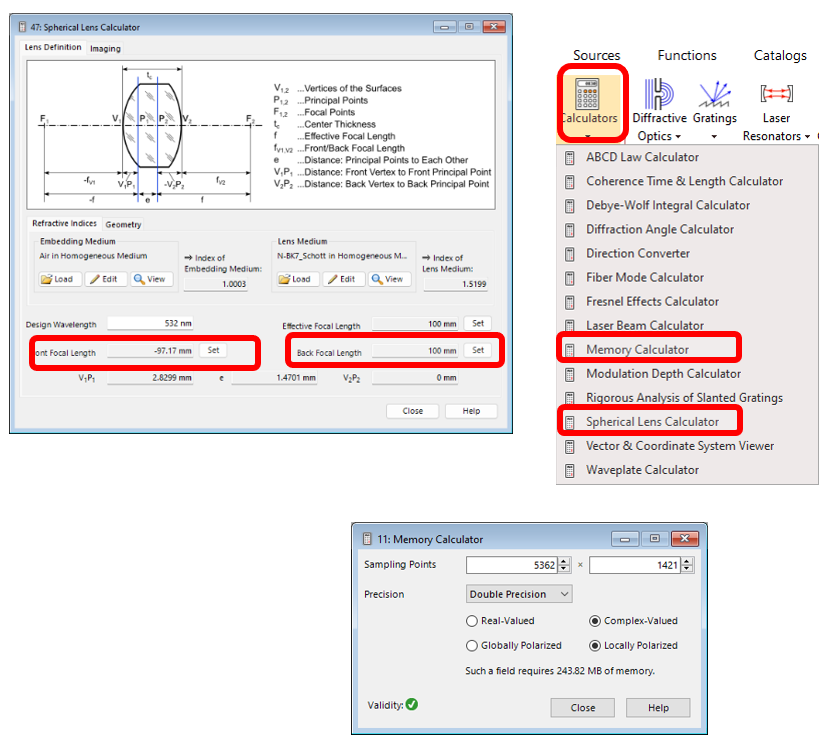 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



