2022 年 12 月,发布 VirtualLab Fusion 2023.1 Ya!P��V&"Z VirtualLab Fusion 2023新版本更新内容(三) g+�?2@L�$L 2023.1版本新特性一览 �"2 :zWh7| ��t7�,$u- 基本信息 �Dg}EI^ �d
f*p=�j(sF�
 oc[z� dI�k
oc[z� dI�k  t=�jG�$��A
t=�jG�$��A VirtualLab Fusion 2023.1新版本
主要更新方向 D^f�;X.Qm�
 7[0CV�W�s,
7[0CV�W�s,
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 v��RDs~'f�
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: �(�iJ�
�/�
- 更快的速度 DH�4IF i�>
- 更容易使用 �b�P�V;"
- 融合更多物理光学模型 g�ebL6oc%�
- 更高的透明度 J'�k^(Z�Z�
- 多元的仿真控制选择 8u1?\SYnb
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 T!^v^m@>y�
WKw�YSbs(
�w"�)�m]LV
功能概述(以下为更新内容的详细解释和案例展示): 4�C�*�0MV
数据视图 \zO�sq5��}
N-45LS��@ VLF 2023.1数据视图 ,&Vi��r�)S z�$M-U��xY 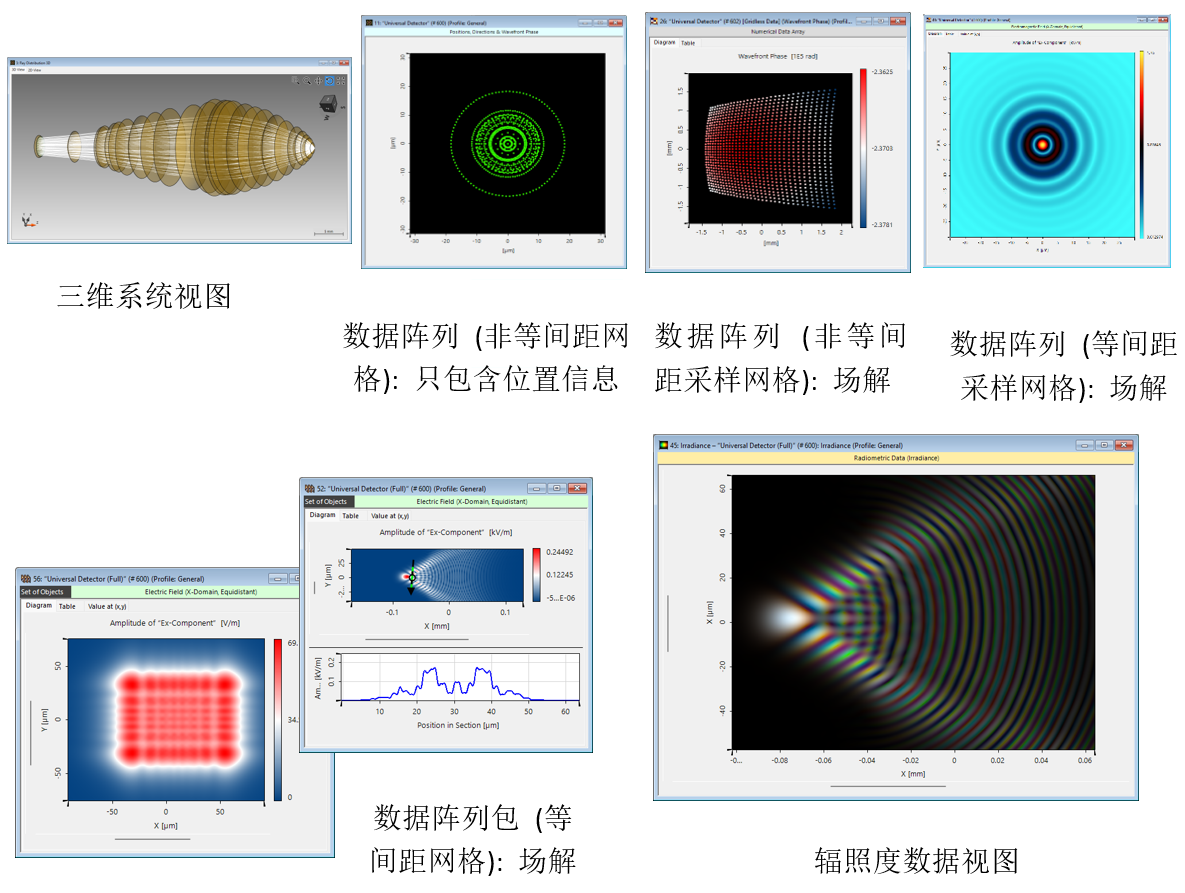 joNV�4v"=` ��g?cxq�C< VirtualLab Fusion 2023.1数据查看方式 �E;q+�u[$�
joNV�4v"=` ��g?cxq�C< VirtualLab Fusion 2023.1数据查看方式 �E;q+�u[$�
��q &S@�\b
 ��6
�tB\X^ C��3
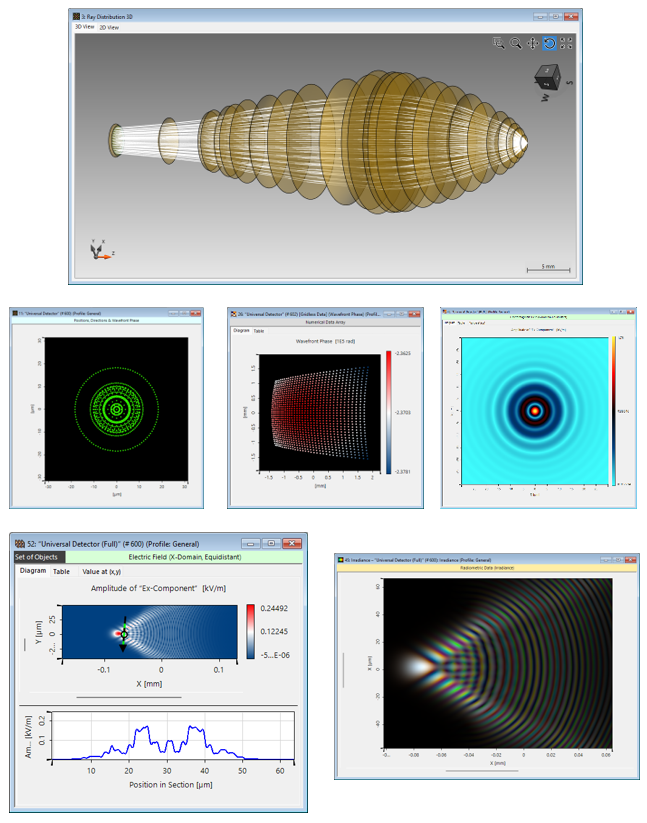
Bo�H& 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 `v'y�G�sIV 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ���Il#��ST 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 Xxj<Ai���2 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 �SN[ar��&I 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 TJZ�ar�Nc$
��6
�tB\X^ C��3
Bo�H& 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 `v'y�G�sIV 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 ���Il#��ST 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 Xxj<Ai���2 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 �SN[ar��&I 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 TJZ�ar�Nc$
HC6v#-( `{
`�L!L=.}4�
三维系统视图: 新的对话框以及设置选项 Zvr�a� >�%
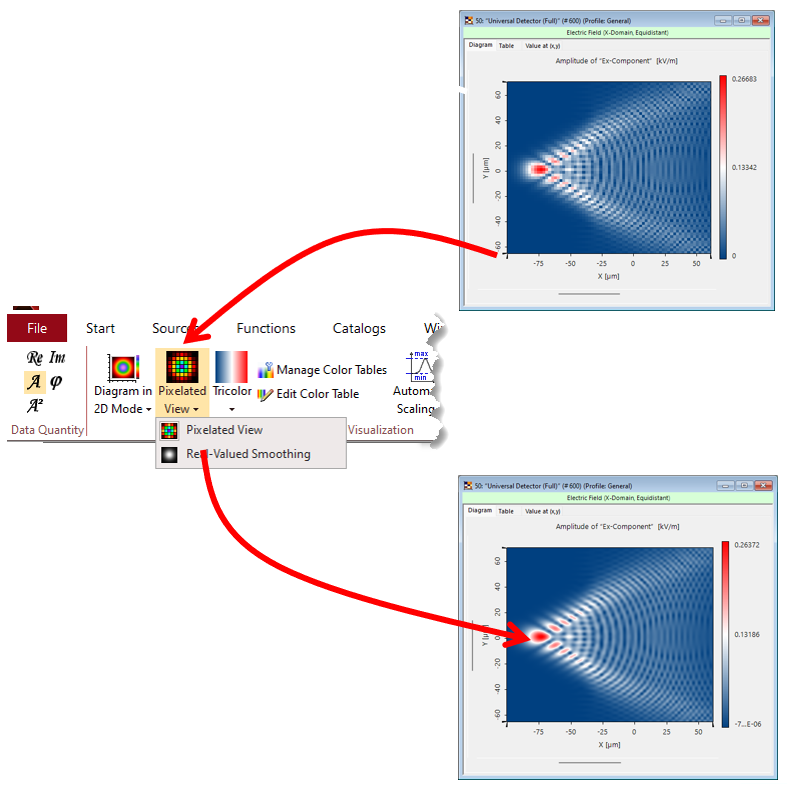
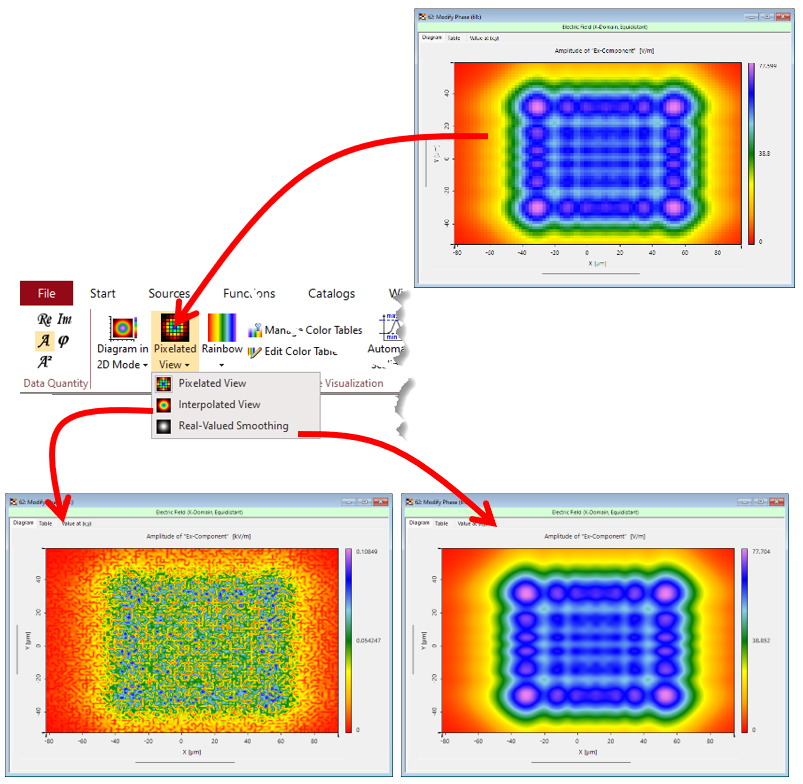
Qc�jsQTAbk 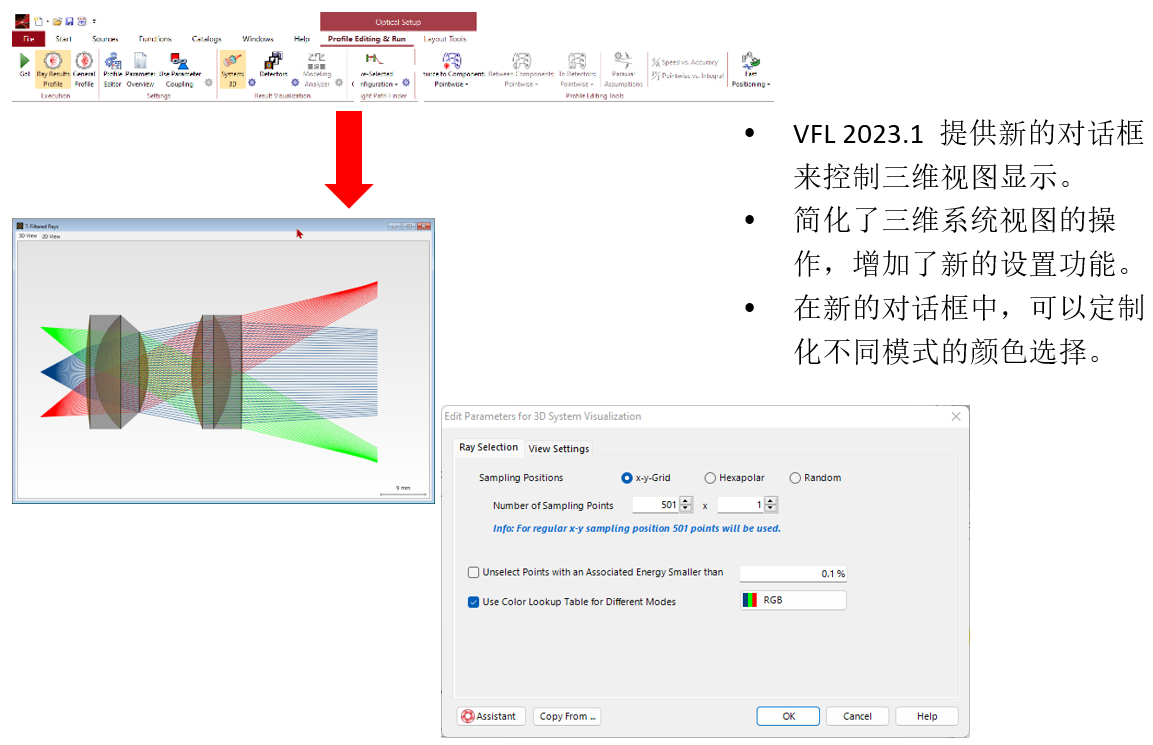 �$0+&xJVn {Eq��x�'j� 数据阵列视图: 像素数据(Pixelated Data)平滑 D'^UZZlI^I � �D�@]/%; • 探测器中的像素越少,探测器评估速度更快。 "�EE��(O9q • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 |C0���!mU� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 �EZ�T� 8^m 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 9 aK�U}�y�
�$0+&xJVn {Eq��x�'j� 数据阵列视图: 像素数据(Pixelated Data)平滑 D'^UZZlI^I � �D�@]/%; • 探测器中的像素越少,探测器评估速度更快。 "�EE��(O9q • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 |C0���!mU� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 �EZ�T� 8^m 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 9 aK�U}�y�
J5z\e@?.0\
 Mq#�Hi9SKY
Mq#�Hi9SKY
Y3��-f68*(
数据阵列视图: 像素数据(Pixelated Data)光滑化 a :cfr*IsK
B���H}M]<5
~&"'>�C�#�
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �Z&7Yl(��|
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 5@p��LGMHT
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 �Z�o�Ck]hk
aN!��,�\D�
 �C 7YS>?^]
�C 7YS>?^]
�Vo|[Z)MO`
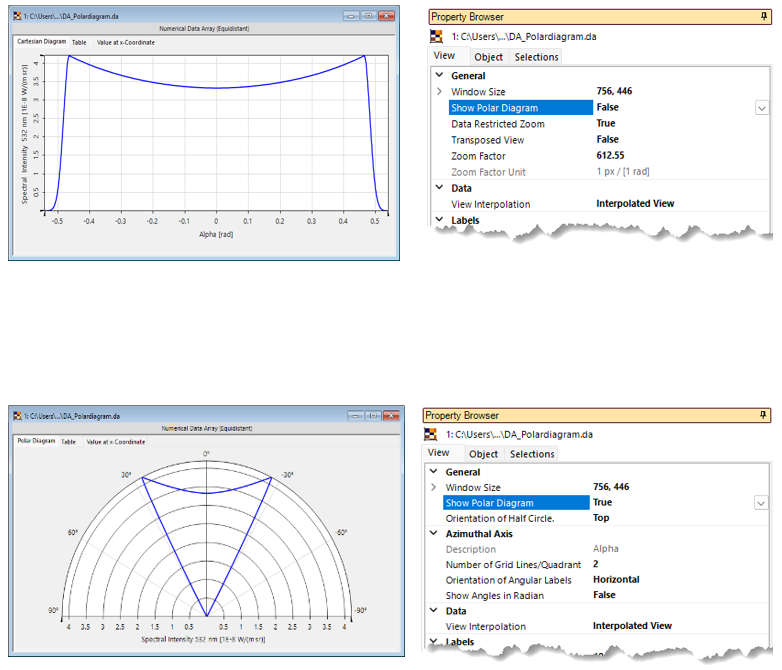
数据阵列视图: 极坐标图(Plolar Diagram) ��;hh�.w??
<U��TO\�w% • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 ~4xn�^��.w • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 '�?LqVzZI� • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 +k0UVZZX? • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 r"t,/@�`n�
c6iFha;d�b
 �_��x$�\�E
�_��x$�\�E
VZ7E#z+nM#
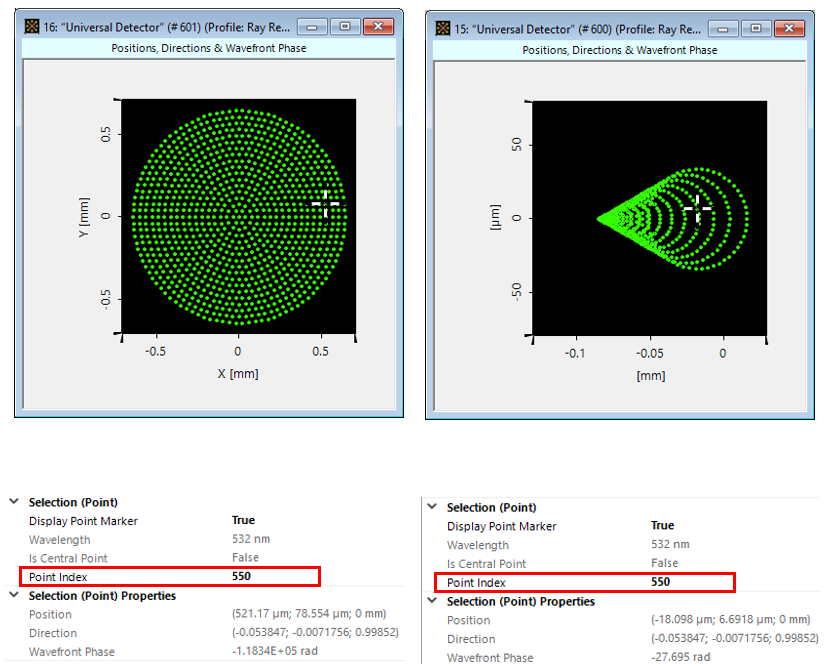
数据阵列视图:找寻以及点的标识 1@F>E;YjL=
� �l�sgZ�
�zz8NB�O�
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 u(PUbxJ�
V
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 /J�(~N�GT�
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 }Nma %6PfV
o>�&�-B.zq
 ^b^�buCYw
^b^�buCYw
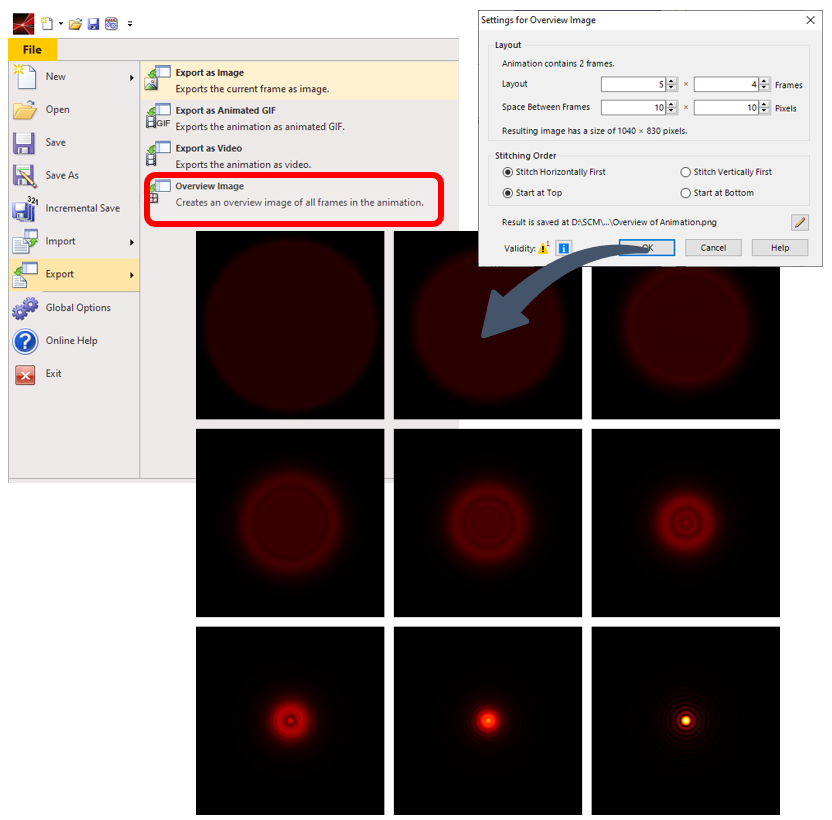
�PWO5�R�]� 导出图像的概览 k7(lw�EgNG Ds{DVdqA$c �M<�Y{�C�s
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �?=�Ho�U3�
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 Wq?vAnLb�k
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 ,L-V?�B(UQ zy|�h1�.gd
 Z�!4�B=?�(
Z�!4�B=?�(
�\VypkbE+
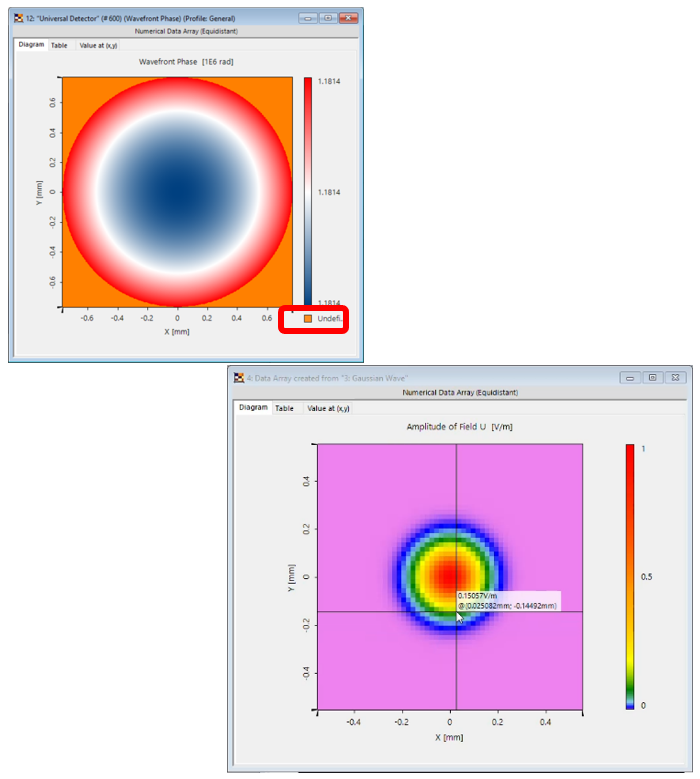
数据阵列视图: 更多的新功能 }C$D-fH8sW
O:8Ne*L`D�
��0W�~��1v
• VFL2023.1可以对未定义区域填充不同的颜色。 Zq:c2/\c�}
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 j�HV)
T�Br
X�+��/^s)�
 �Pj5:=d8z(
�Pj5:=d8z(
4E$d"D5]>p
Graphics Add-ons提供更多数据视图选择 `1#Z9&b��O '��]Z%6_WF �7�Jpq7;��
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 s%A?B��8,�
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 162�Dj�$�
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 cs�[n�FfM� `�H9�!Z$7G 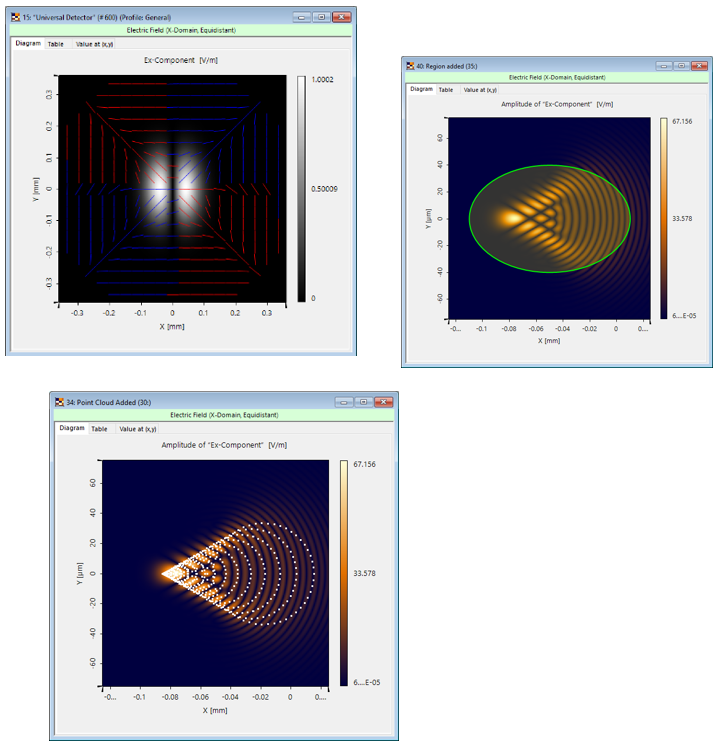 3ik~PgGoKQ �cqcH�1aSv ~b%�dBn]n> Graphics Add-ons提供更多视图选择 zXkq2\�GHA ��F|��P?|�
3ik~PgGoKQ �cqcH�1aSv ~b%�dBn]n> Graphics Add-ons提供更多视图选择 zXkq2\�GHA ��F|��P?|� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
l�bh�7`xCR • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
H;+98AIy`� • 图像组件提供了多样化的配置选项。
��n�-����1 ViUx^e\��� 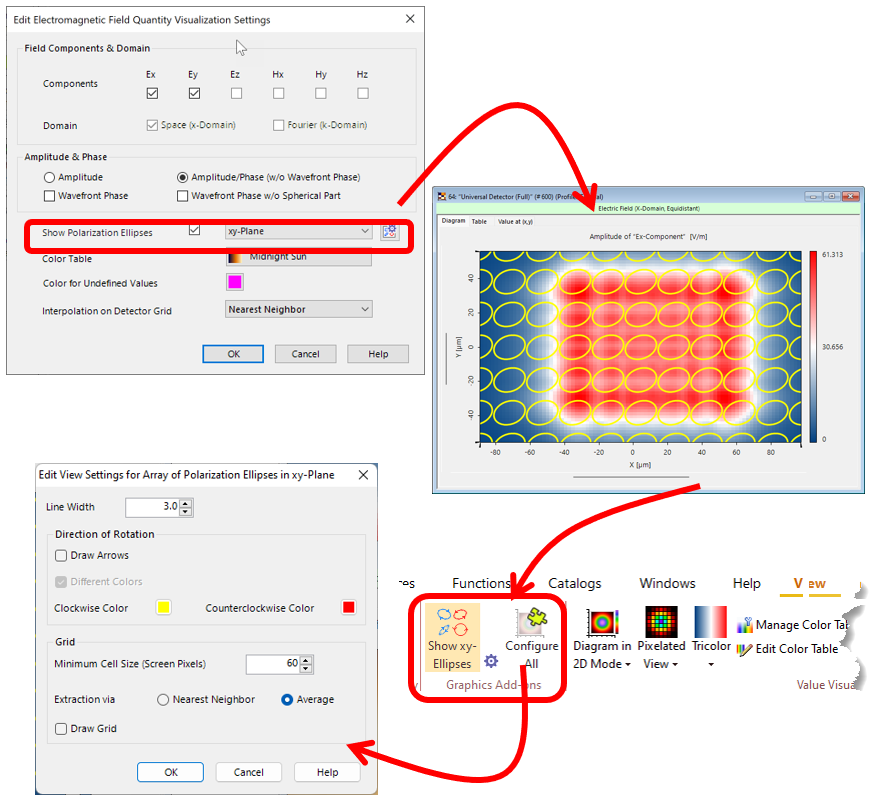 +=*ND<$n/E u_b�6u@r7 4~�h��P25q Graphics Add-ons: 增加了 Point cloud 功能 )r(e�\_�n� %H3�iX^}�* M7��Y�bRl�
+=*ND<$n/E u_b�6u@r7 4~�h��P25q Graphics Add-ons: 增加了 Point cloud 功能 )r(e�\_�n� %H3�iX^}�* M7��Y�bRl� • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
Un&rP7�0� 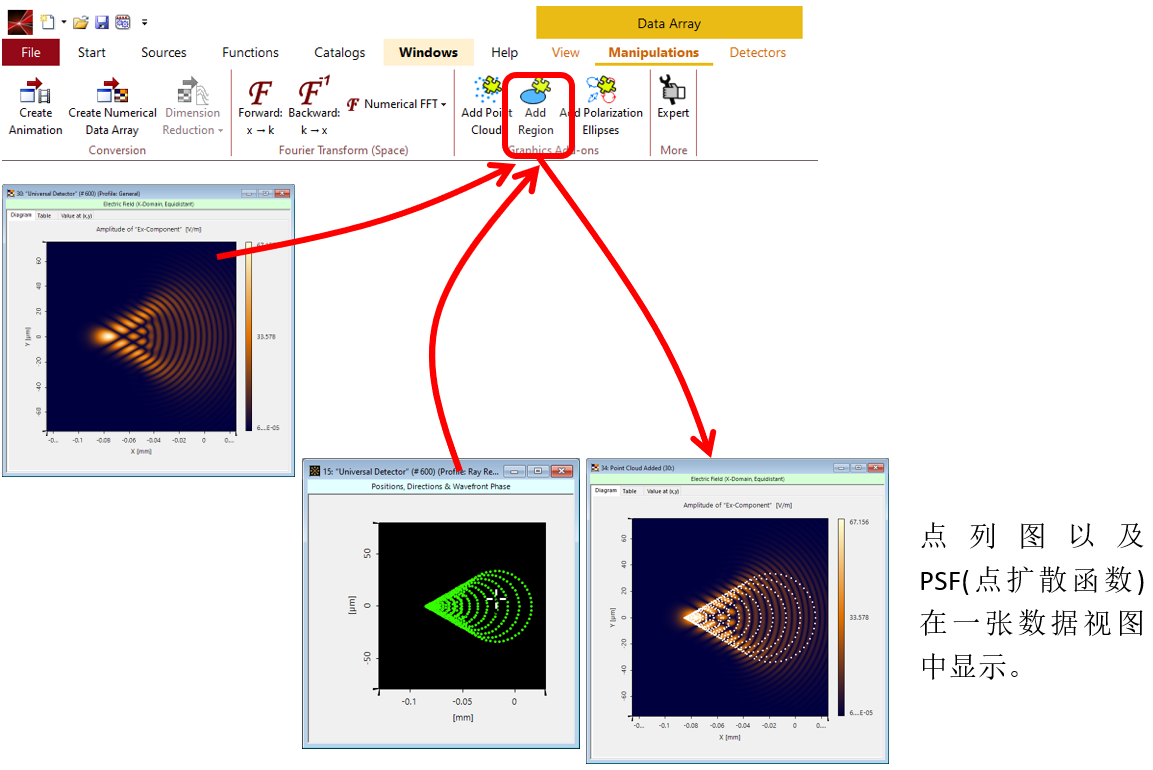 Gsz$�H_ '�}q/;�}ih VirtualLab中的区域 (Regions) )�"6�3g�� Q,�};O�$h� !�[eipOX�
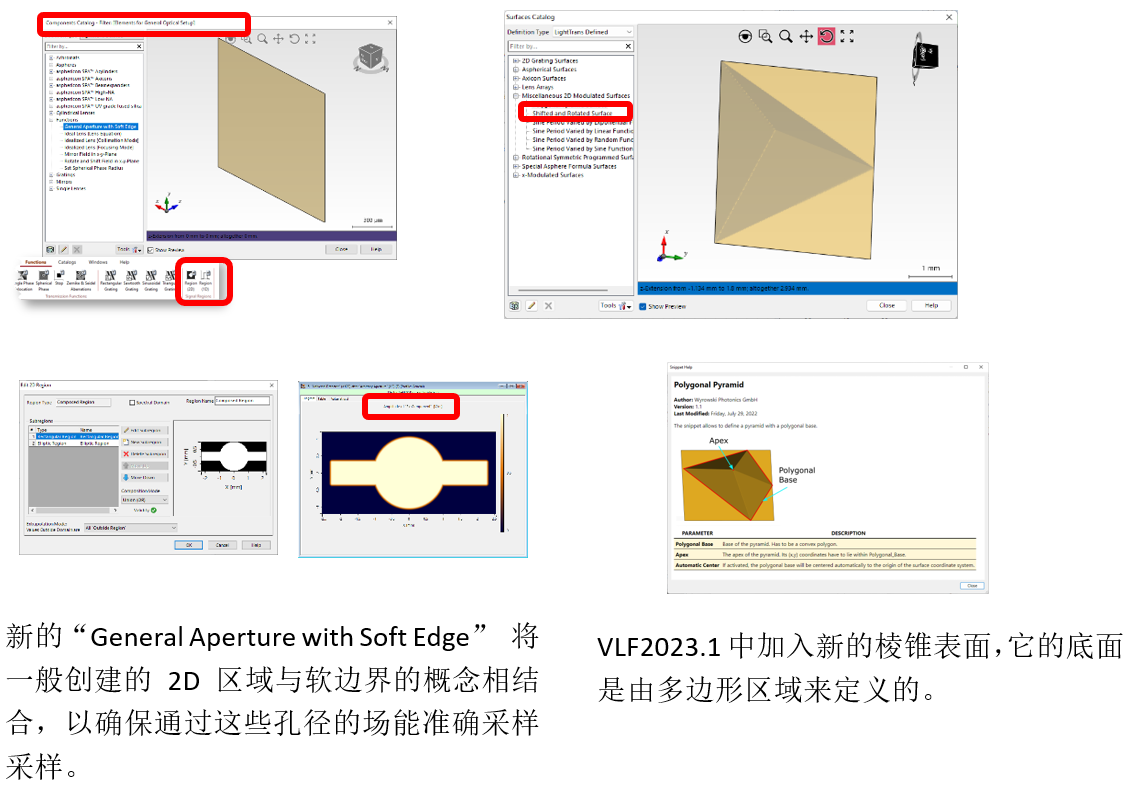
Gsz$�H_ '�}q/;�}ih VirtualLab中的区域 (Regions) )�"6�3g�� Q,�};O�$h� !�[eipOX� • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
7��lr;�S(C 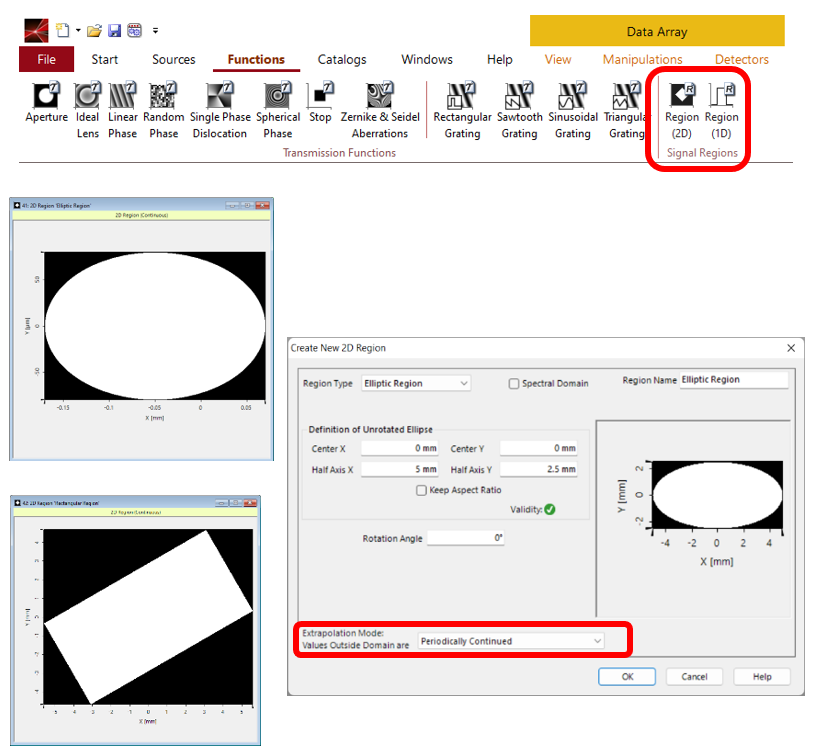 }}Gki�pp�� (R9"0W�eF� �(aB:P03�� Graphics Add-ons: 添加区域(Add Region) Pu�'lp
�O� SjcX�|=�S� :zpT Gk8Z�
}}Gki�pp�� (R9"0W�eF� �(aB:P03�� Graphics Add-ons: 添加区域(Add Region) Pu�'lp
�O� SjcX�|=�S� :zpT Gk8Z� • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
V=Z�%y$1Bc 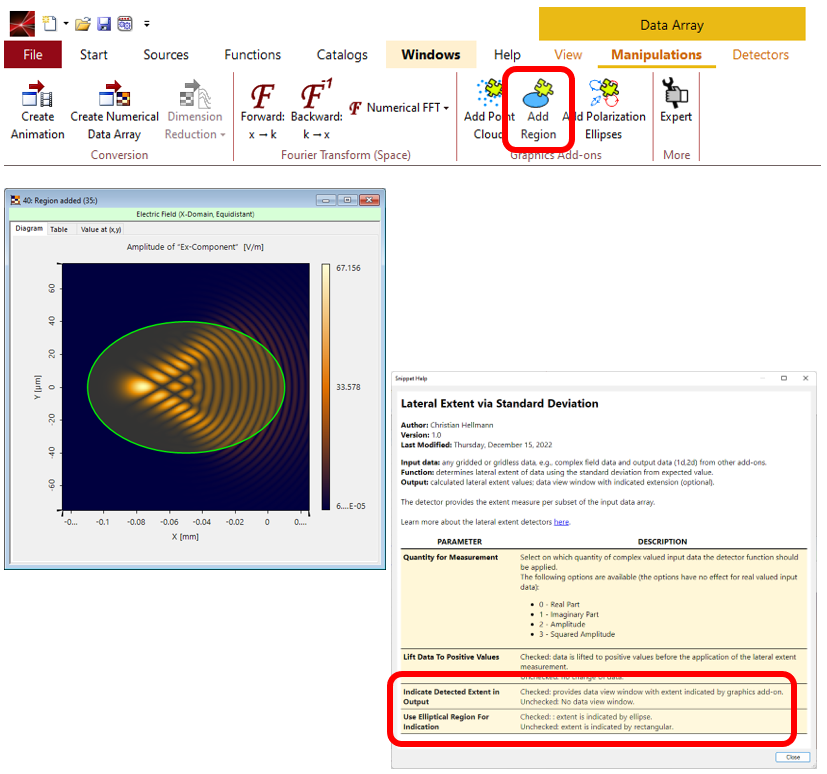 4I.�)>�+8V �]jR-<l8I-
4I.�)>�+8V �]jR-<l8I- 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
HaF&o�oI5+ w*u.z(�:a` Graphics Add-ons: 添加区域(Add Region) 0�QEcJ]Qb8 yP�34�h*0B :\%h�v�>}| • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
C%�/@U�[�; <�t"fL
RX� 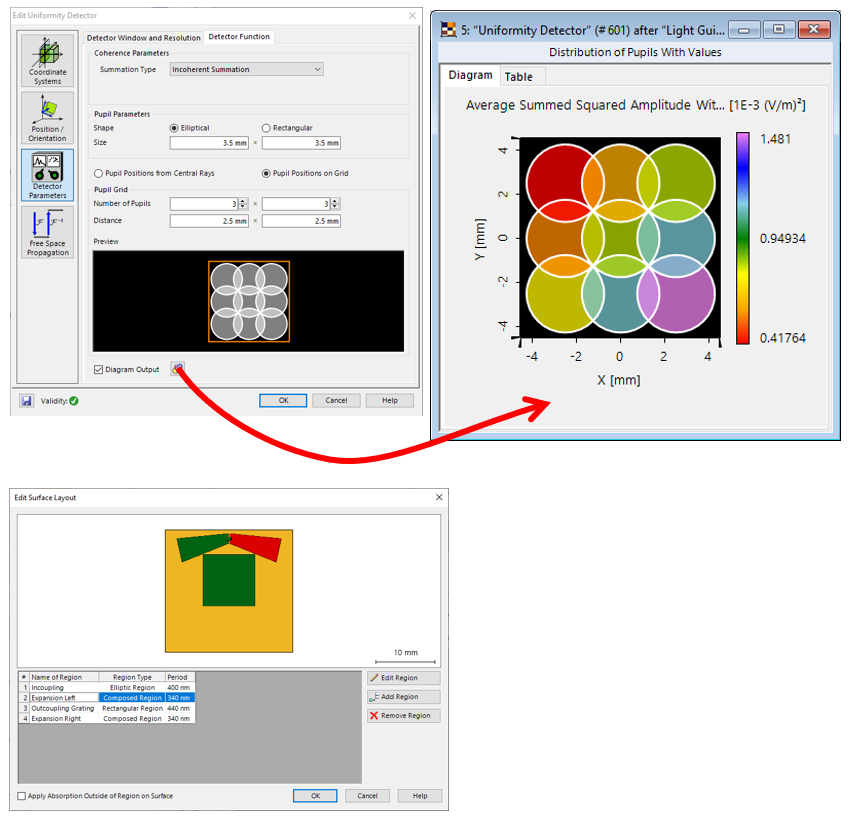 7(H�?�3)%0
7(H�?�3)%0 • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 4�6H�@z�=5 _E�cs��{'k _6]tbn�i?v • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
ZR8y9mx2" • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
]UZP� dw1D 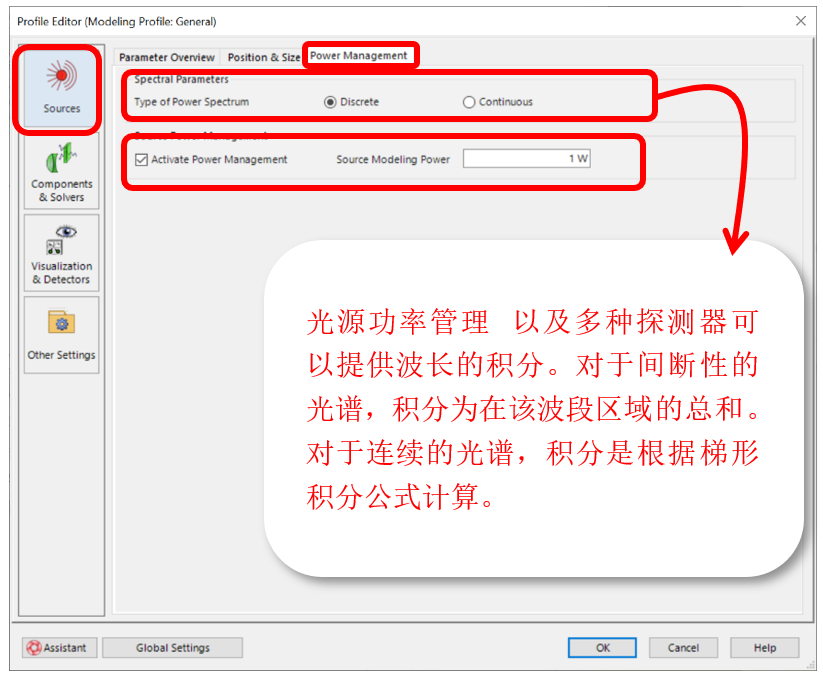 b�Kh}Y`���
b�Kh}Y`��� • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
<�ir�r��.O 1. 针对给定光源参数,进行光源功率的评估。
I}awembw g 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
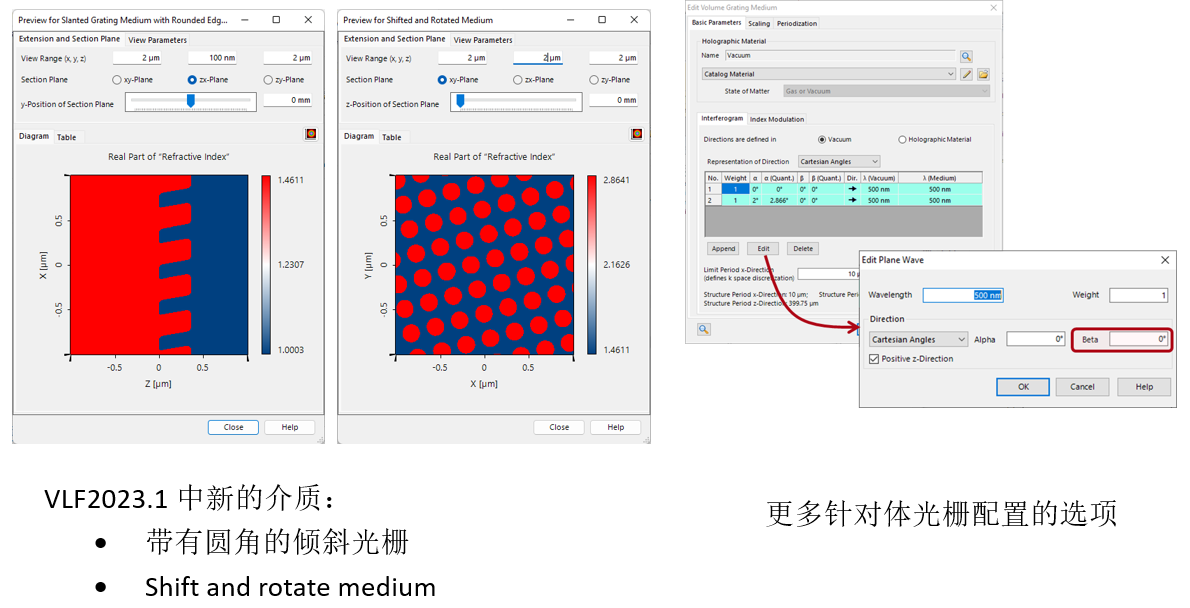
{l\Ep=O vx �GxE`z6�%[ 组件 dx.J��v/Mb 组件(Component)新的特征 t�n�|H~iF{ X�od/GY��G �TnuA uui* • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
V0_�^==V�s 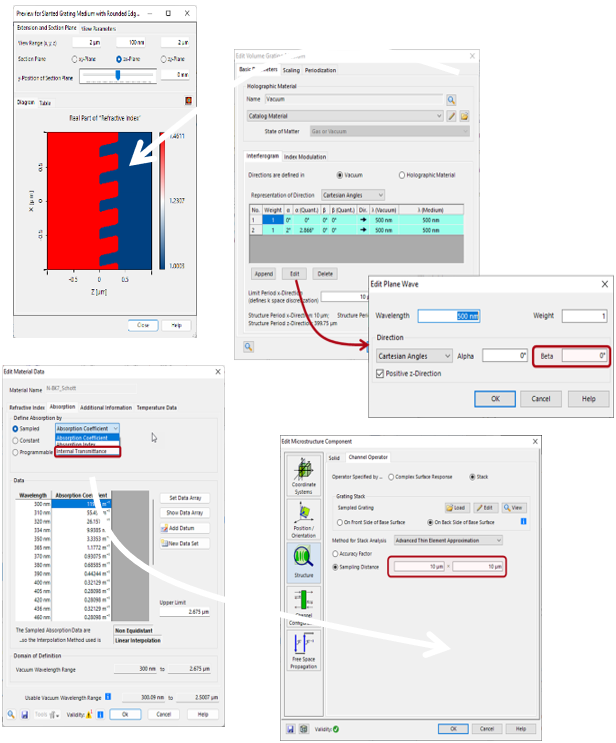 �Ol;"}3*Z* �,,?�X�Gx� 组件(Component)新的特征 &C#?&��A�Q
�Ol;"}3*Z* �,,?�X�Gx� 组件(Component)新的特征 &C#?&��A�Q
~b[�5}_L=>
 �D8b9�T.[(
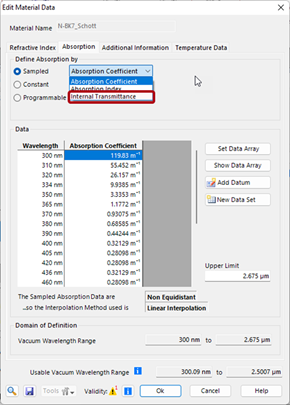
�D8b9�T.[( 吸收特性可以用采样数据定义吸收率以及透过率。
Z������e?H xg;F};}5$
 %V(�U]sb�V i{�r[zA�]$
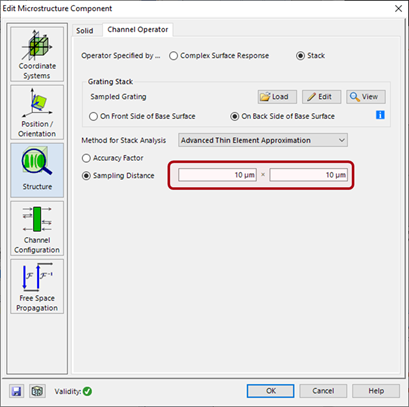
%V(�U]sb�V i{�r[zA�]$ 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
�-Jc�lEp�� <co:z<^lqu 组件(Component)新的特征 |�WgFL�F~k
yEVn�G`
1
 cxIA�I=�JK p;mV?B?oAQ 组件(Component)新的特征 ~S��w���GZ
cxIA�I=�JK p;mV?B?oAQ 组件(Component)新的特征 ~S��w���GZ
�k~JTQh*,w
 e_Fo��N�T� mlz|KI~\F; 组件(Component)新的特征 NkAu<>
G _
e_Fo��N�T� mlz|KI~\F; 组件(Component)新的特征 NkAu<>
G _
�=
jT�C+0u
 fyq�%-Tj� l?H�C-_Pbh 1WI^R�lWd(
fyq�%-Tj� l?H�C-_Pbh 1WI^R�lWd( 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
_i�u^VK,}� 处理日志 V@`%k��]�k /K<>Oy�R�? 扩充版的处理日志 ) Lo�h�B,? (Y"./BD�Y� d[p�?B-7�% • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
�R�!>�S�N0 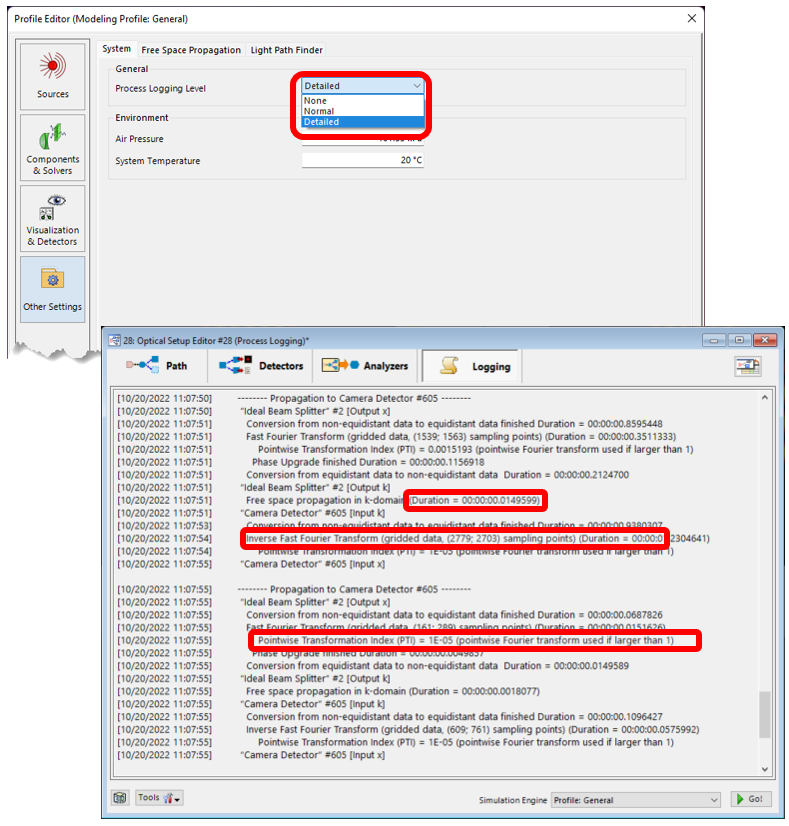 _V3}��F1?W �c7�R6.T�� 系统仿真分析 �rt\.|Hr4s �M2A_T.F=H
_V3}��F1?W �c7�R6.T�� 系统仿真分析 �rt\.|Hr4s �M2A_T.F=H • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
A=n�p�?�wc 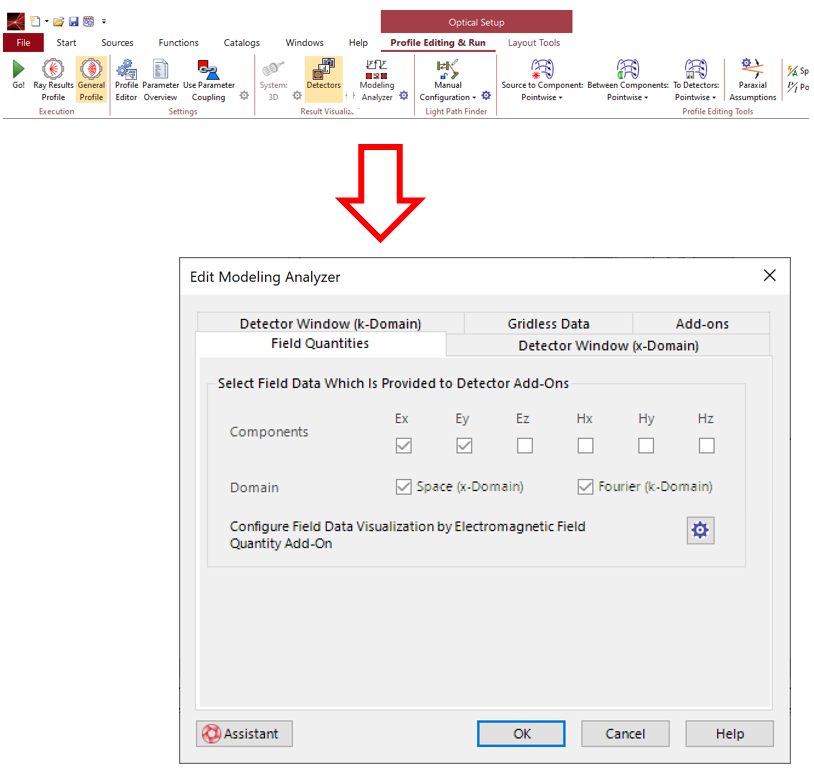 =!��($=��9 ^�KQZ;�[B� 专家模式(Expert Modus) }�50s\H._C 5+/XO>P1m| 专家模式中的数据阵列’Manipulations’ 0� R�>!jw� ��6�Zv-k�G mC'<O�v<eJ
=!��($=��9 ^�KQZ;�[B� 专家模式(Expert Modus) }�50s\H._C 5+/XO>P1m| 专家模式中的数据阵列’Manipulations’ 0� R�>!jw� ��6�Zv-k�G mC'<O�v<eJ • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
|gf�G\fL3V 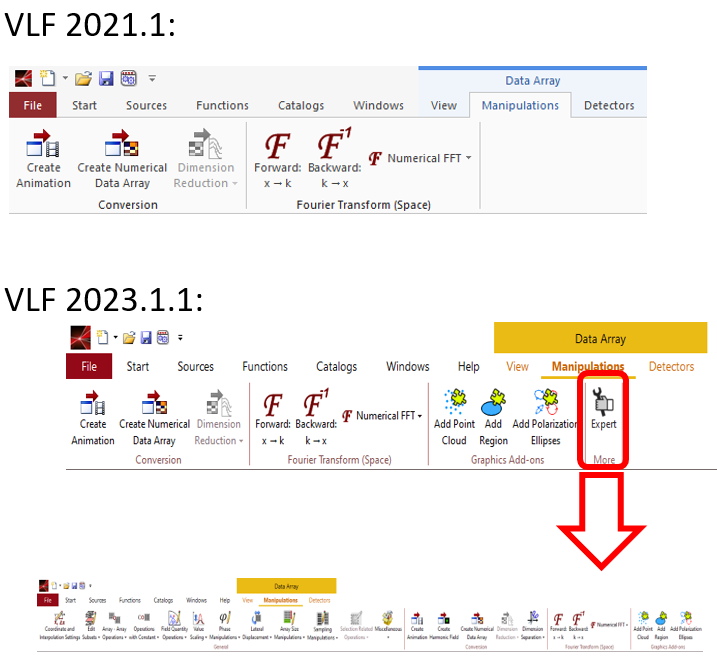 -�hG�LGF?? �>�{"E~�U� 微小的改进帮助:新的计算器 :�7s���2M� ��V�rJf� g I8���\R7s3
-�hG�LGF?? �>�{"E~�U� 微小的改进帮助:新的计算器 :�7s���2M� ��V�rJf� g I8���\R7s3 • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
'.7E�R��� 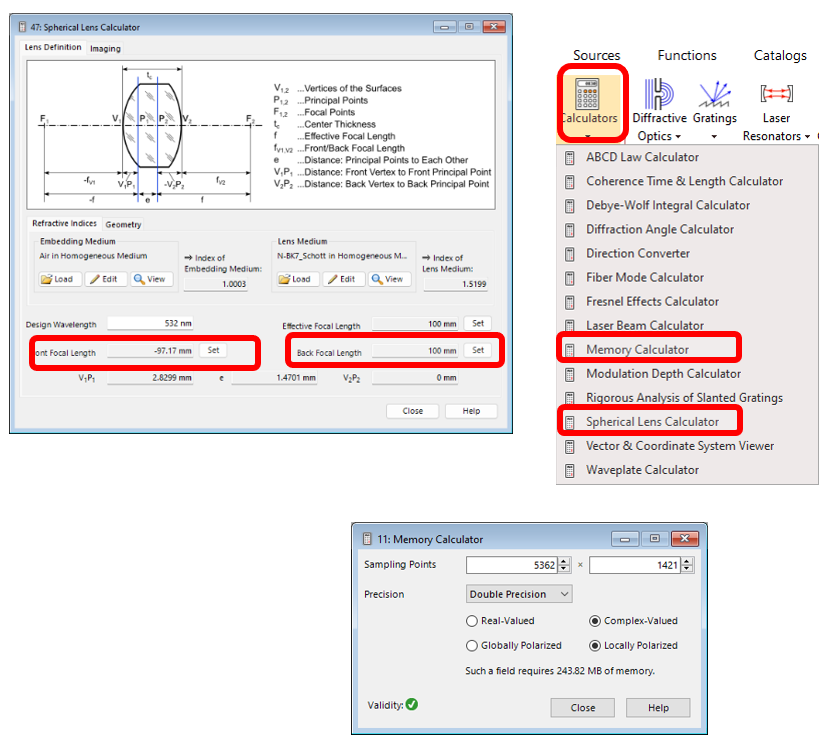 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



