2022 年 12 月,发布 VirtualLab Fusion 2023.1 � _BC��q9/ VirtualLab Fusion 2023新版本更新内容(三) ��hxw6^�EA 2023.1版本新特性一览 4ZYywD�wn� ZK<c(,o�Z^ 基本信息 e{�^l�D.E
6!=q+sw�/X
 azR�p4�~2?
azR�p4�~2?  �SxkY ;^-U
�SxkY ;^-U VirtualLab Fusion 2023.1新版本
主要更新方向 4��]xD-sc�
 p>+�Q6o9O�
p>+�Q6o9O�
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 ���qmNG|U&
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: v9#F\��F�/
- 更快的速度 %"|W�
qxv
- 更容易使用 �\(z��U��I
- 融合更多物理光学模型 P�M��QlJ&�
- 更高的透明度 u���Oh��
- 多元的仿真控制选择 o,$�K=#I�v
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 �],'"�iVh
�3,I�u�!KB
]7q�|) S\�
功能概述(以下为更新内容的详细解释和案例展示): 3aJY�l3:0B
数据视图 ]v+yeGIK�S
y3P4]s�q�� VLF 2023.1数据视图 X"jtPYCpV{ �0])[\O`�j 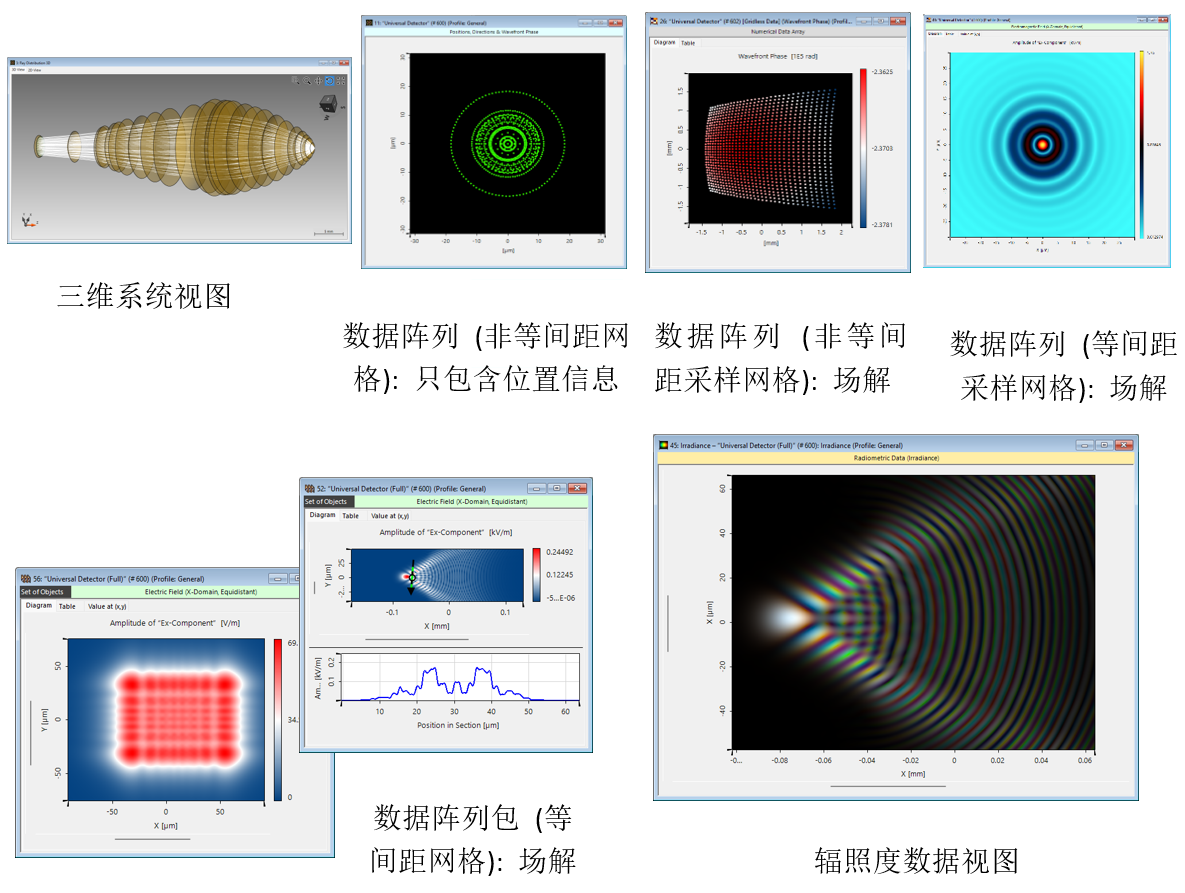 Ma�F4l�FmS /H�djP��xH VirtualLab Fusion 2023.1数据查看方式 I`x[1%y2 F
Ma�F4l�FmS /H�djP��xH VirtualLab Fusion 2023.1数据查看方式 I`x[1%y2 F
"cvhx/�\1#
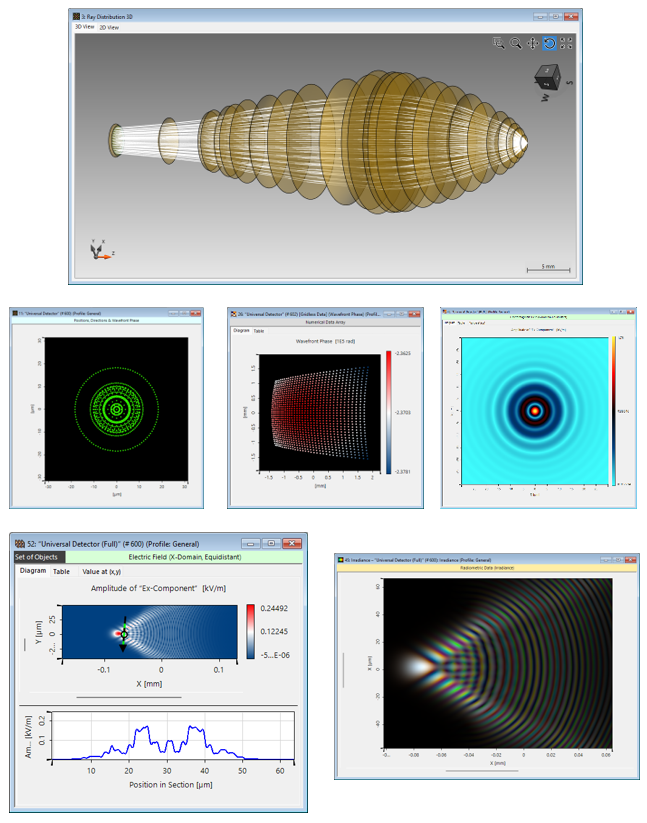 �Kv� �ajk~ ,Z8�)D�C=� 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 �E���+$D$a 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 *�De�'4r 2 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 jZ�iz 0[� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 �w�/9%C(w6 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 j?\z5�i""f
�Kv� �ajk~ ,Z8�)D�C=� 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 �E���+$D$a 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 *�De�'4r 2 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 jZ�iz 0[� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 �w�/9%C(w6 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 j?\z5�i""f
�<driD�'=F
,G[�Y< ~Hy
三维系统视图: 新的对话框以及设置选项 O<MO2U+^�x
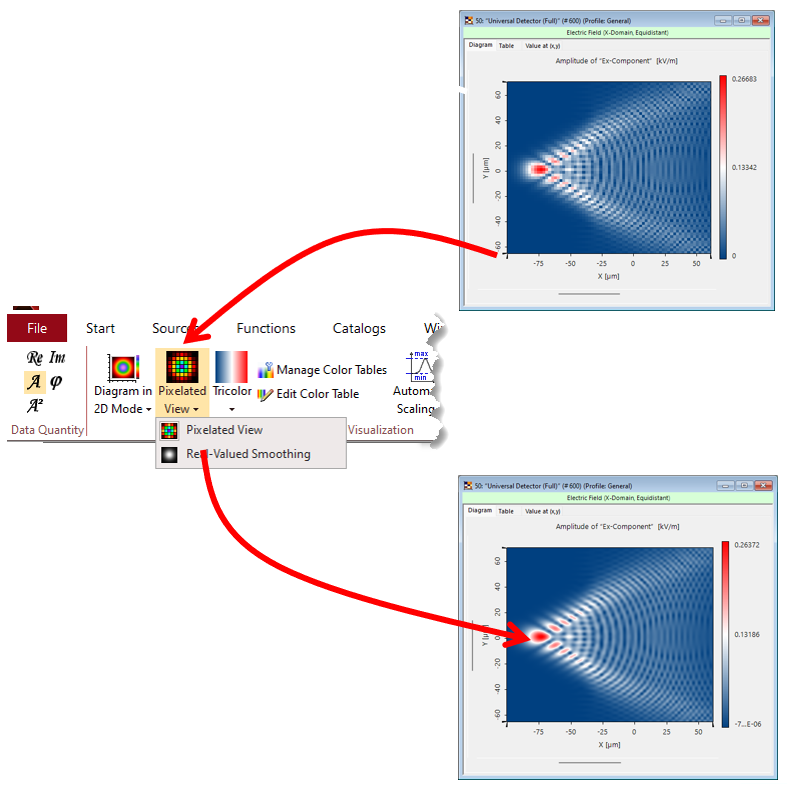
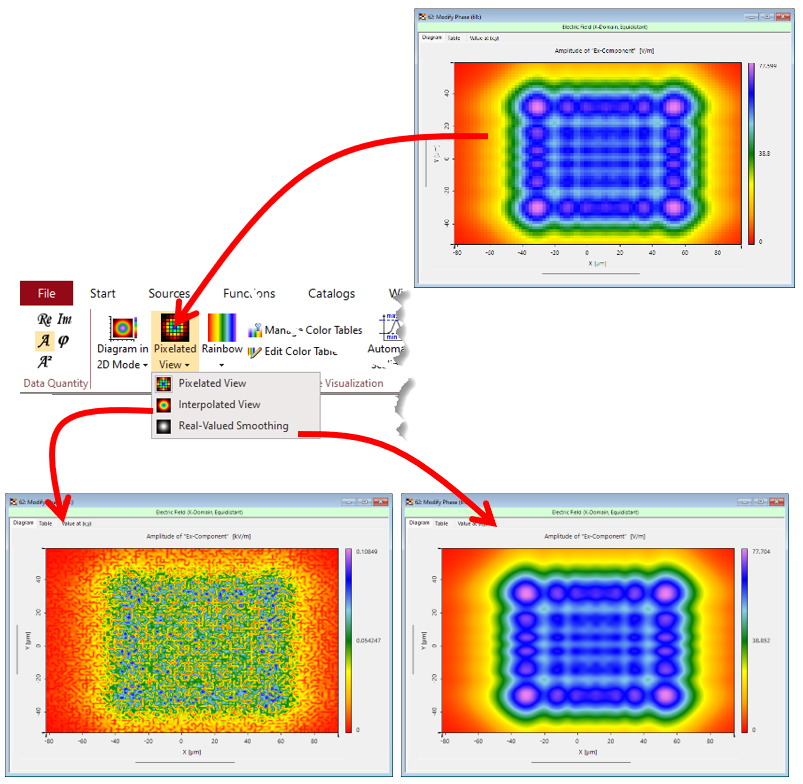
U�e�!��y�K 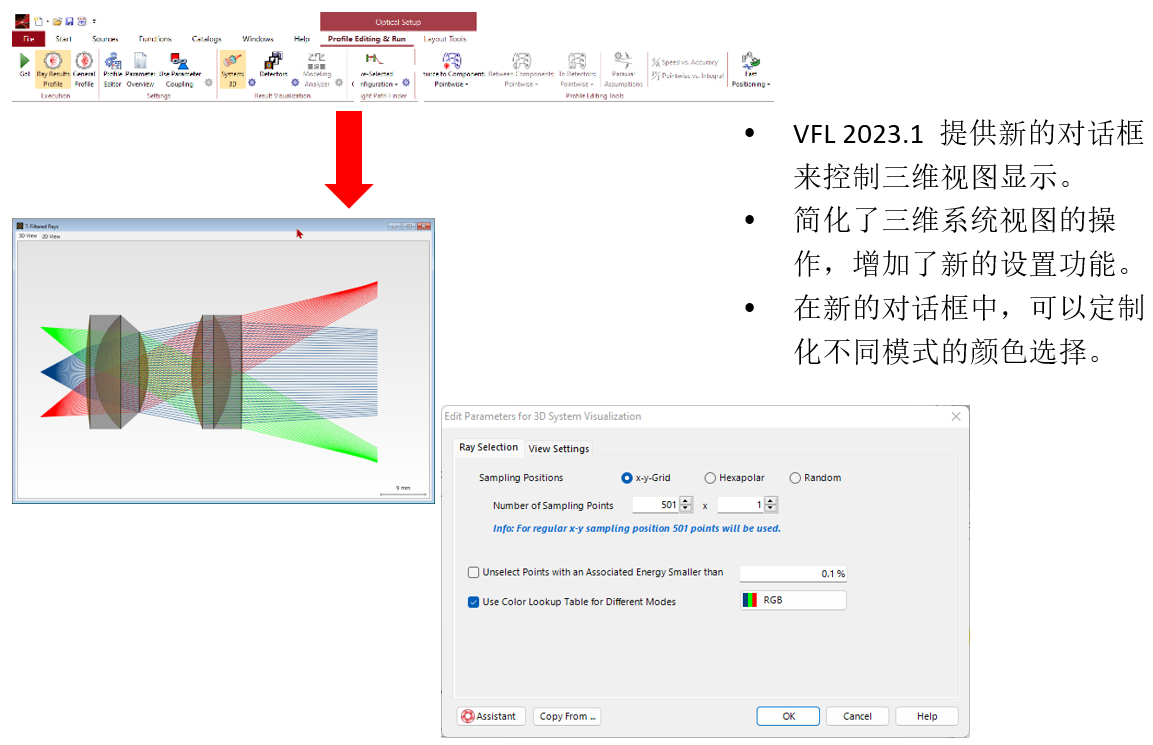 !&5*H��06� T`Gi�M%R;g 数据阵列视图: 像素数据(Pixelated Data)平滑 mri��g�5�{ WYIv&h�<h" • 探测器中的像素越少,探测器评估速度更快。 �wEQZ9��?\ • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 iV!V!0�- @ • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 g�J^taU�E� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 S�F� da?�>
!&5*H��06� T`Gi�M%R;g 数据阵列视图: 像素数据(Pixelated Data)平滑 mri��g�5�{ WYIv&h�<h" • 探测器中的像素越少,探测器评估速度更快。 �wEQZ9��?\ • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 iV!V!0�- @ • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 g�J^taU�E� 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 S�F� da?�>
W�>'(�MB$3
 `��A����-�
`��A����-�
o/&
IT(�v�
数据阵列视图: 像素数据(Pixelated Data)光滑化 }i�^$
l�i@
$oPc,zS-gL
r;���+a%?P
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 (O&���HCT|
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 8is��QL���
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 R*2F)e�\|�
ex66GJQ�e1
 l�b�C,*�U^
l�b�C,*�U^
�!'�B�='].
数据阵列视图: 极坐标图(Plolar Diagram) �R@�U4Ae{+
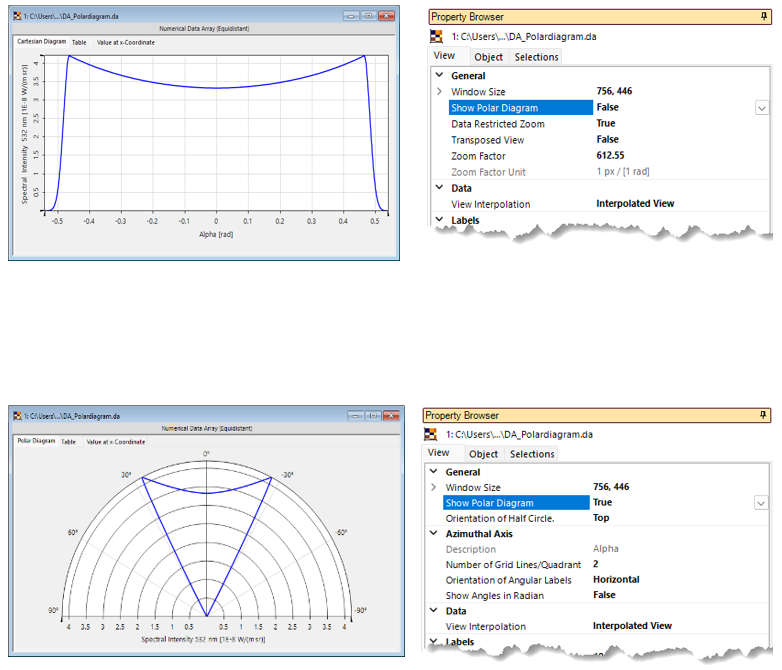
|������/�n • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 g{f7�} gTG • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 u��Q�7lC�~ • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 ? 51i0~O=� • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 �6h0}�Z��M
Q 9E�.AN�
 Qj�$w��7*U
Qj�$w��7*U
<(H<*X�f9�
数据阵列视图:找寻以及点的标识 e0j4t-�lL�
�N|�3#pHm@
E'NS$�,h��
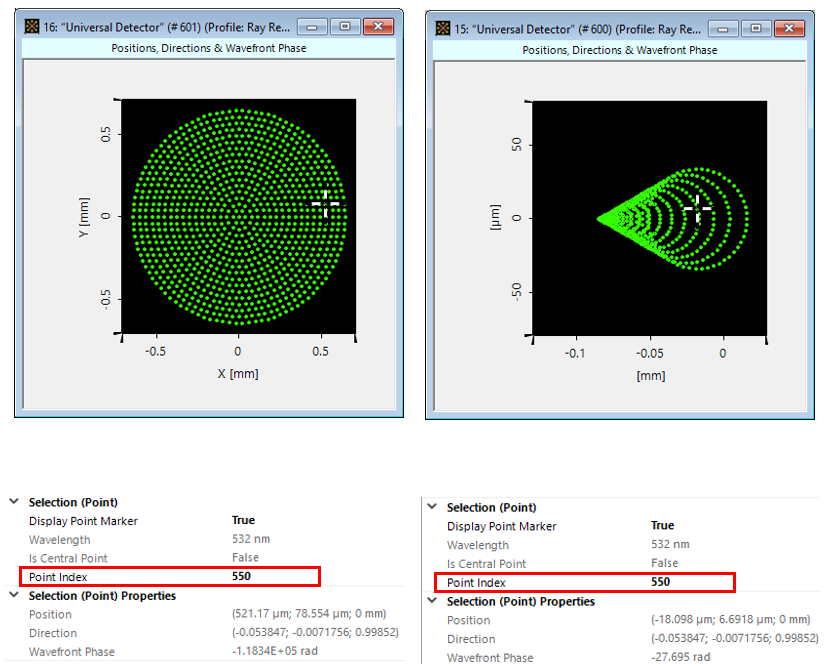
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 C~C`�K�%7�
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 Av�4(=}M}@
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 �cI���cu=U
^;tB,�7:*V
 ���|�dDKO�
���|�dDKO�
�oxdX2"WwU 导出图像的概览 Nr).*]g@�~ LF#[$
so{i ��) �TRU�x
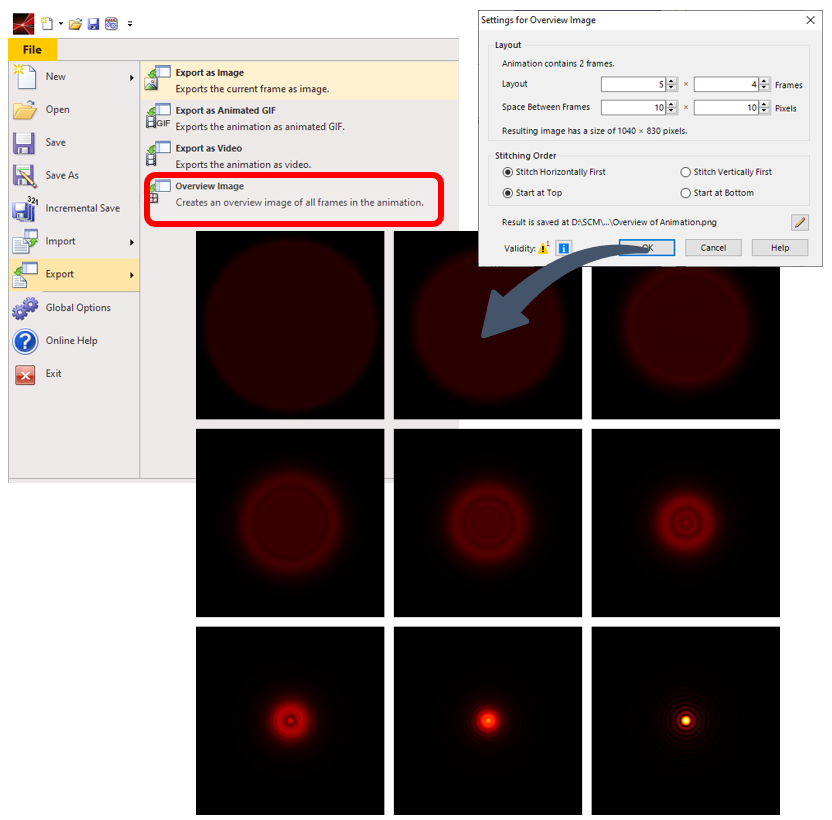
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �5"X@�<;H%
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 h@�o�6=d=4
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 {'�z�$5<|� �^A�i�QNL}
 *z.r�OY=
8
*z.r�OY=
8
\jmZ�t*��c
数据阵列视图: 更多的新功能 ` ��U-�vXP
@;N(3| �n7
;cZp$�
xb3
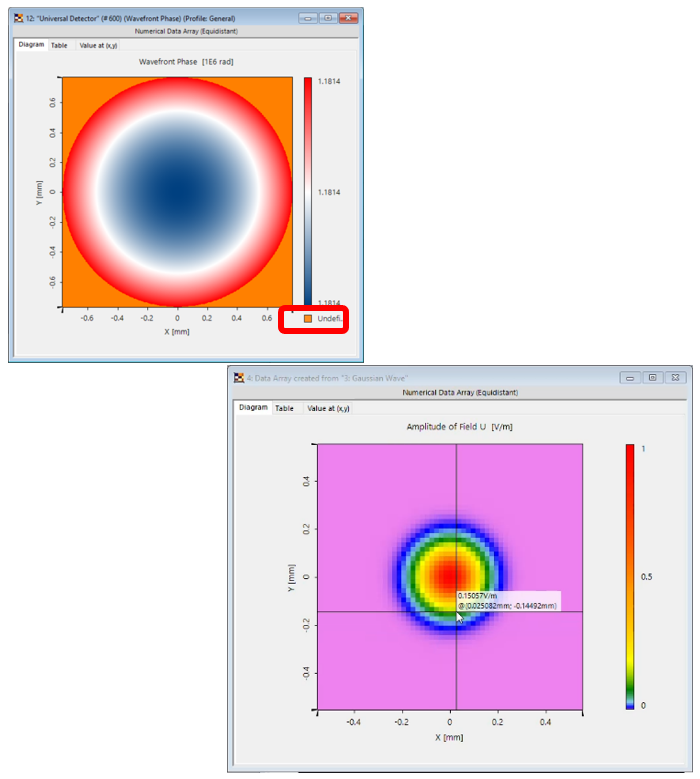
• VFL2023.1可以对未定义区域填充不同的颜色。 w�'E�?�L`c
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 #�=;��vg��
/)k��x�`G_
 E�V�C]�B}
E�V�C]�B}
�B�<�H�N$/
Graphics Add-ons提供更多数据视图选择 [rL 8�L6,! B^/k�`h6J� *aFY+�.;U`
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 =LGSywWM�9
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 gXM+N�(M-�
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 E+L�QyvF�[ uGm?e]7Hx< 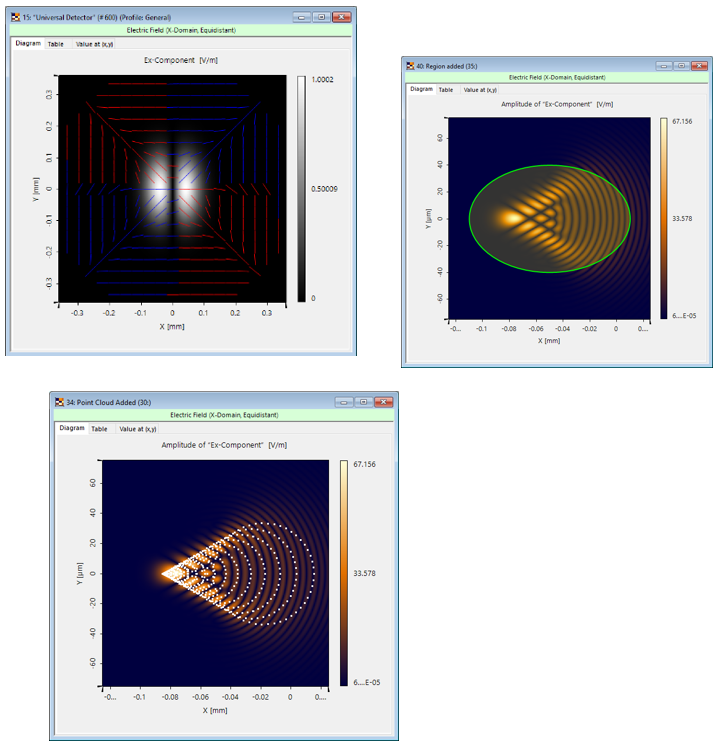 ?%Ww3cU+J� �UE�hFI�d c{K�J�NH%7 Graphics Add-ons提供更多视图选择 (E,Ibz2G:e s`0IyQX�VU
?%Ww3cU+J� �UE�hFI�d c{K�J�NH%7 Graphics Add-ons提供更多视图选择 (E,Ibz2G:e s`0IyQX�VU • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
$R���NHRA. • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
\ 9iiS(�e� • 图像组件提供了多样化的配置选项。
�*��N�}$~N y7%SHYC p[ 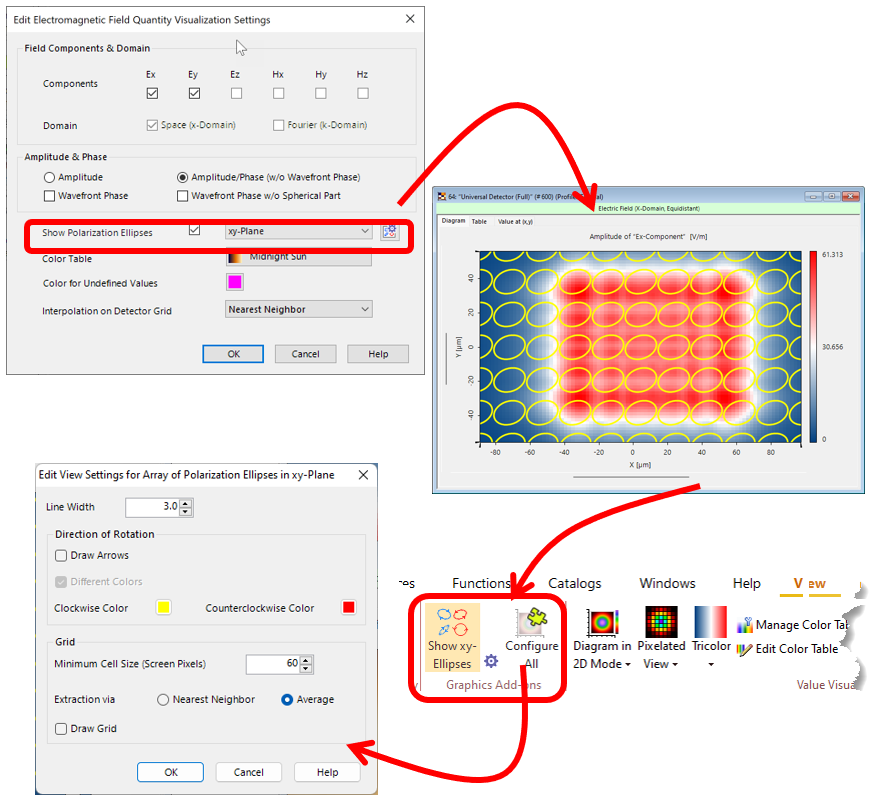 h+�A+>kC5� ~(7c�t�*U~ ST;o�^�\B� Graphics Add-ons: 增加了 Point cloud 功能 B2'TRXIm1U �0L1sF'Z�N Yl:�[b{�Py
h+�A+>kC5� ~(7c�t�*U~ ST;o�^�\B� Graphics Add-ons: 增加了 Point cloud 功能 B2'TRXIm1U �0L1sF'Z�N Yl:�[b{�Py • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
�YDj5�+'�y 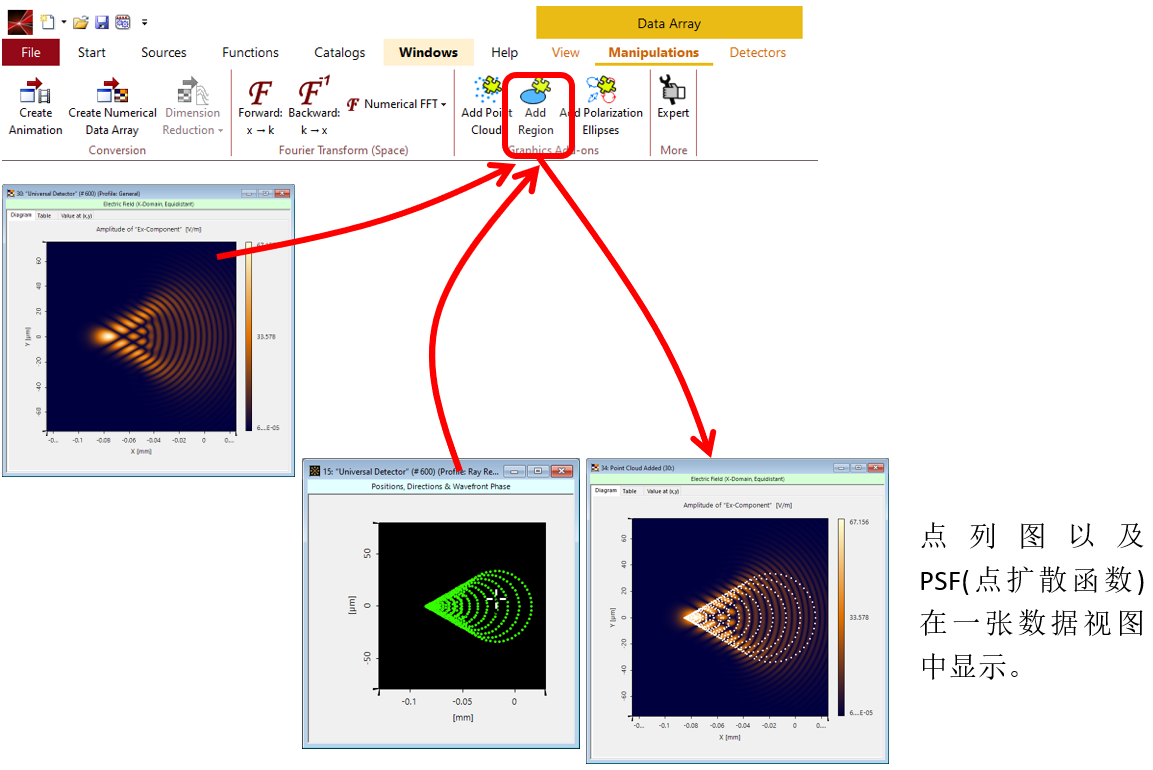 �= �^Vp� \ �iz��{�TSU VirtualLab中的区域 (Regions) os��&FrtDg lI+�^�}�-< �+!!G0Z�j/
�= �^Vp� \ �iz��{�TSU VirtualLab中的区域 (Regions) os��&FrtDg lI+�^�}�-< �+!!G0Z�j/ • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
.N@+�M��s3 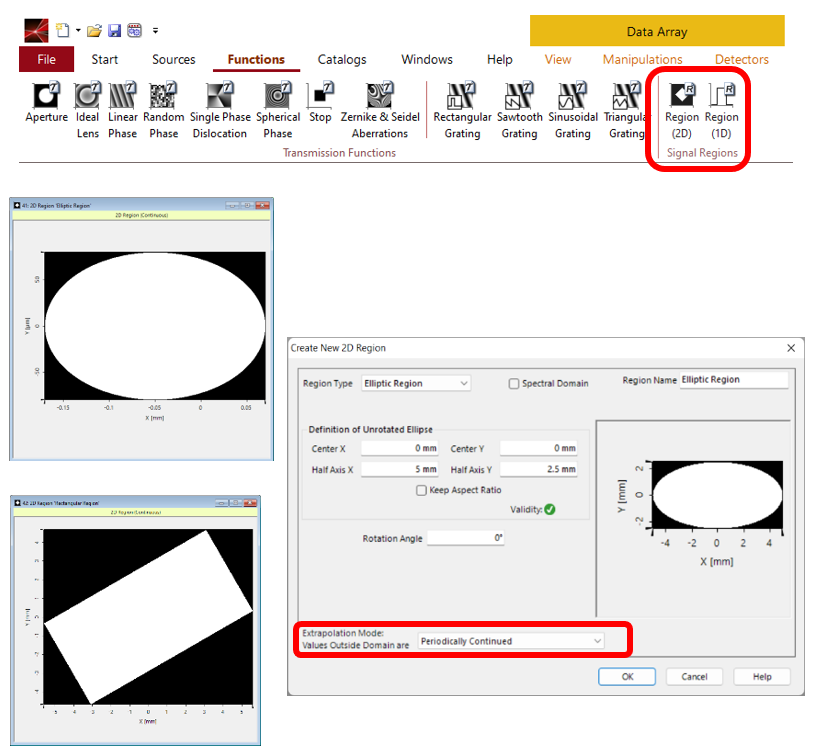 TbN�{e�x* SynRi/BRmw /wl]���kGF Graphics Add-ons: 添加区域(Add Region) x�5V))~Ou� q��vK�/}�� �+8�x_f0�<
TbN�{e�x* SynRi/BRmw /wl]���kGF Graphics Add-ons: 添加区域(Add Region) x�5V))~Ou� q��vK�/}�� �+8�x_f0�< • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
-sZb+2�tDa 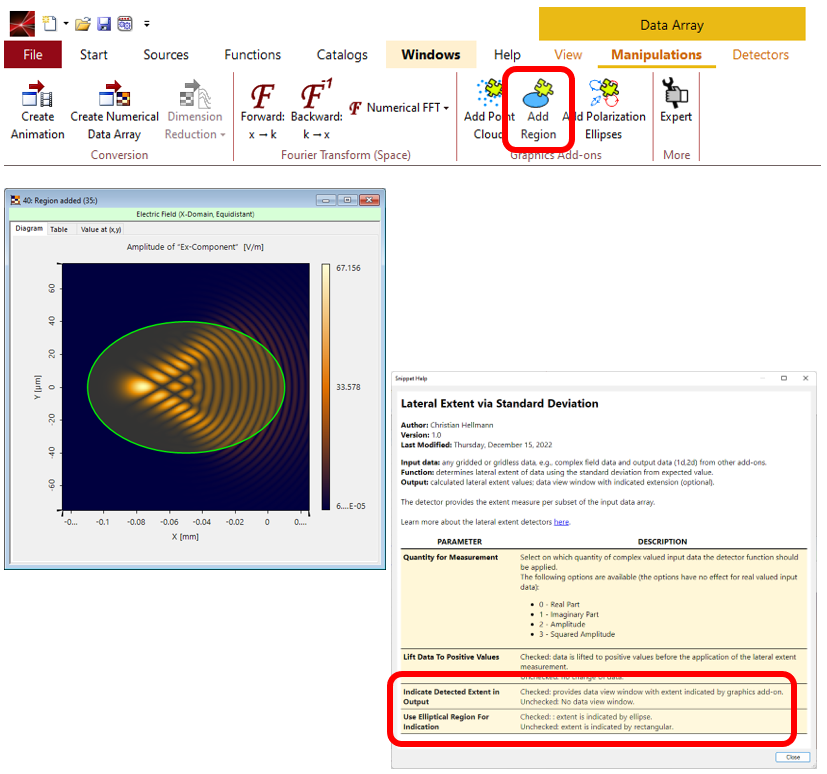 P�=6d<no&< I%GQ3�D�"=
P�=6d<no&< I%GQ3�D�"= 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
�9 wbQ$>G9 ZS;V�?�]\( Graphics Add-ons: 添加区域(Add Region) C/#p�K2xY �RqP_^tB�� yU��4mS;GX • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
�tf|;�'Nc6 �F|qM��o| 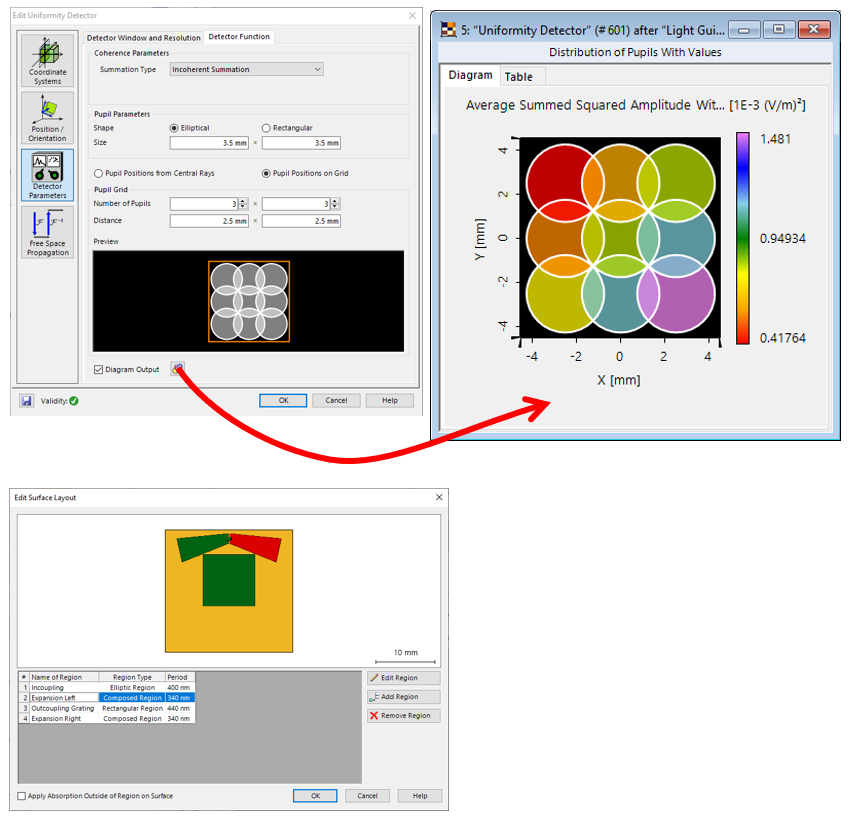 �0�@{0#W3R
�0�@{0#W3R • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 NQX?&9L`r &R?to>xr�\ =QbOv��Iq� • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
���f�1��+� • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
`]]��<�.>R 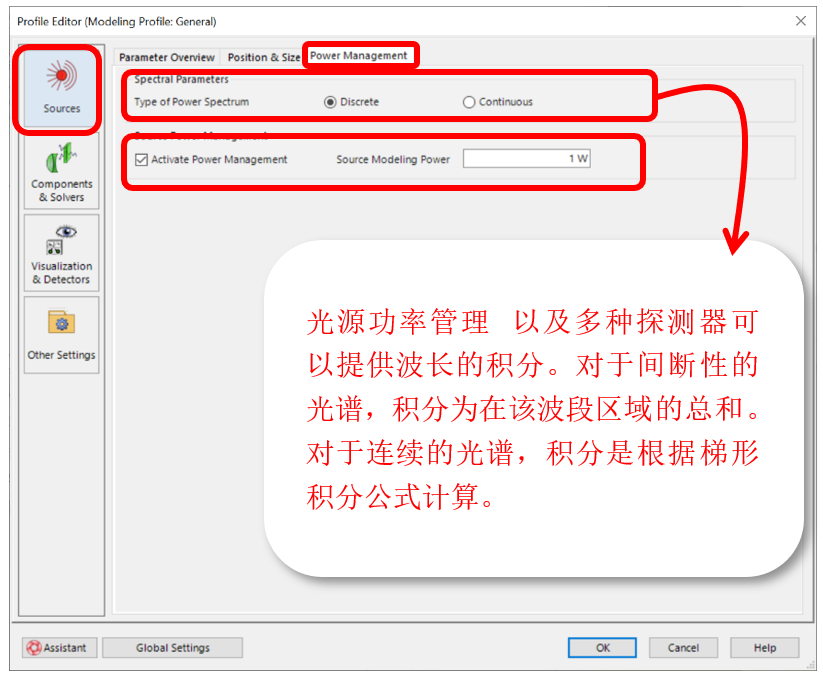 !{+�.)%d'g
!{+�.)%d'g • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
c@"F�V�,L> 1. 针对给定光源参数,进行光源功率的评估。
�
��s2wDJ| 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
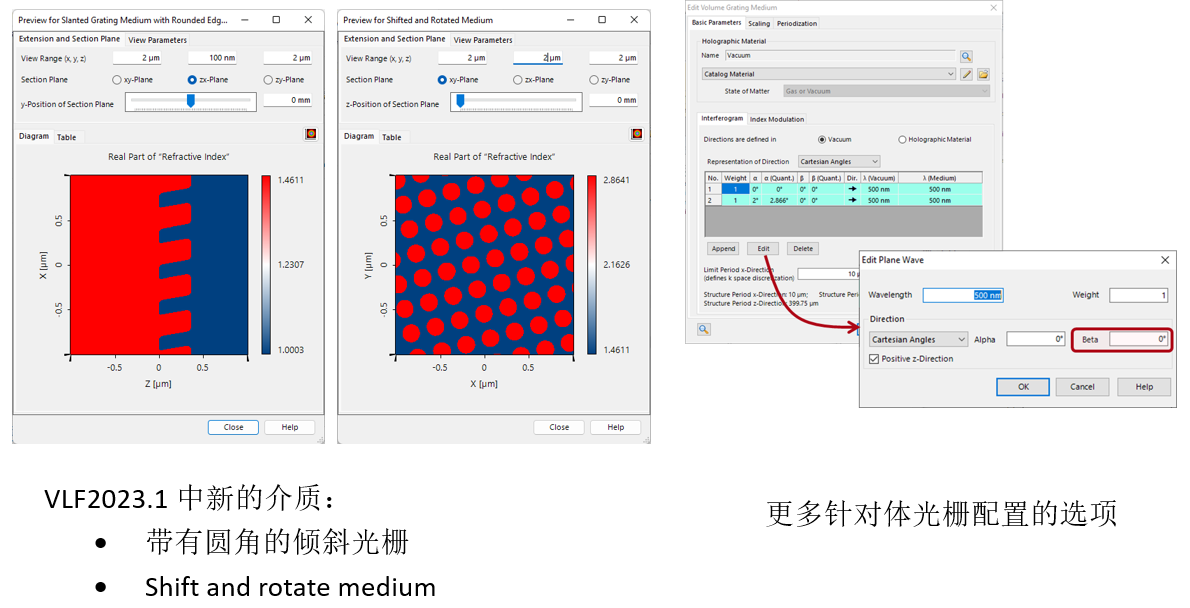
c$^v~l��QS W5= j&�&|! 组件 ;�1�{=t!z= 组件(Component)新的特征 5J|��S�6x\ *hJ�WuMfY, 80'@+A��D� • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
~cfX�EjE6� 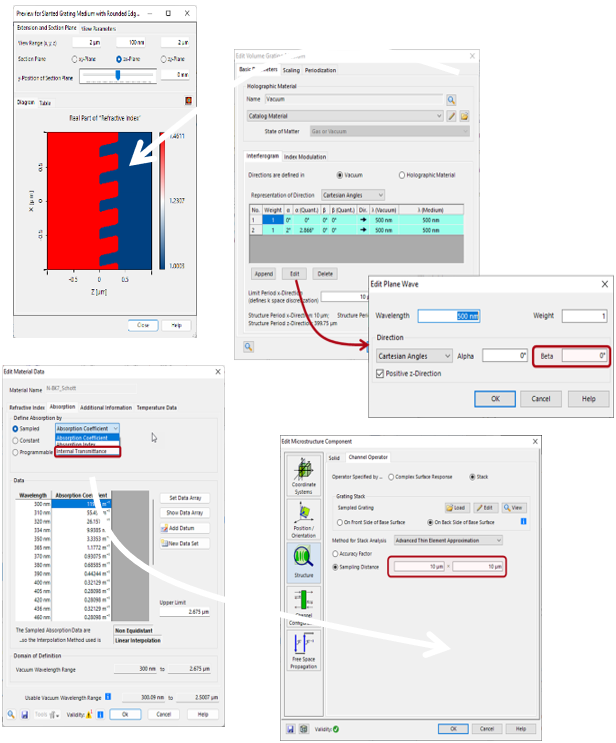 l>`66~+s,` }LKD9U5;8 组件(Component)新的特征 FQ1B�%u|��
l>`66~+s,` }LKD9U5;8 组件(Component)新的特征 FQ1B�%u|��
a:�`<=^:4,
 �m��H�0OW�
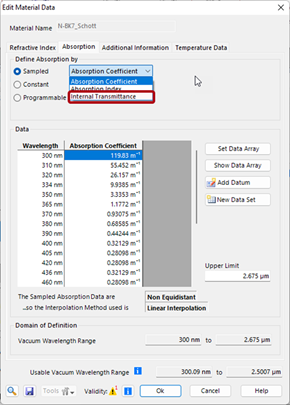
�m��H�0OW� 吸收特性可以用采样数据定义吸收率以及透过率。
O-K*->5�S� ipg�`8�*My 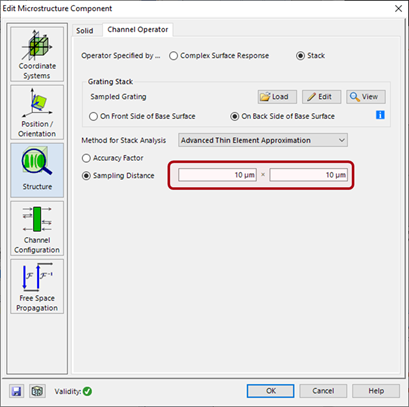 0Xw>_#Y/xS .UQ|k�,,�t
0Xw>_#Y/xS .UQ|k�,,�t 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
�cNx�xX!P/ ge�.>�#1f} 组件(Component)新的特征 \k��`9s�
q
6$=>c��k�P
 ~;H,cPvrEg czpu^BT;;T 组件(Component)新的特征 <��F�BB�R2
~;H,cPvrEg czpu^BT;;T 组件(Component)新的特征 <��F�BB�R2
8.N`^Nj 1
 ?��[�m�1?� , QWu�s"5H 组件(Component)新的特征 ��6kLy!�QS
?��[�m�1?� , QWu�s"5H 组件(Component)新的特征 ��6kLy!�QS
��.m�l\z5�
 oYT�LC@98} ".$k�OH_�: �gh\u@�#$8
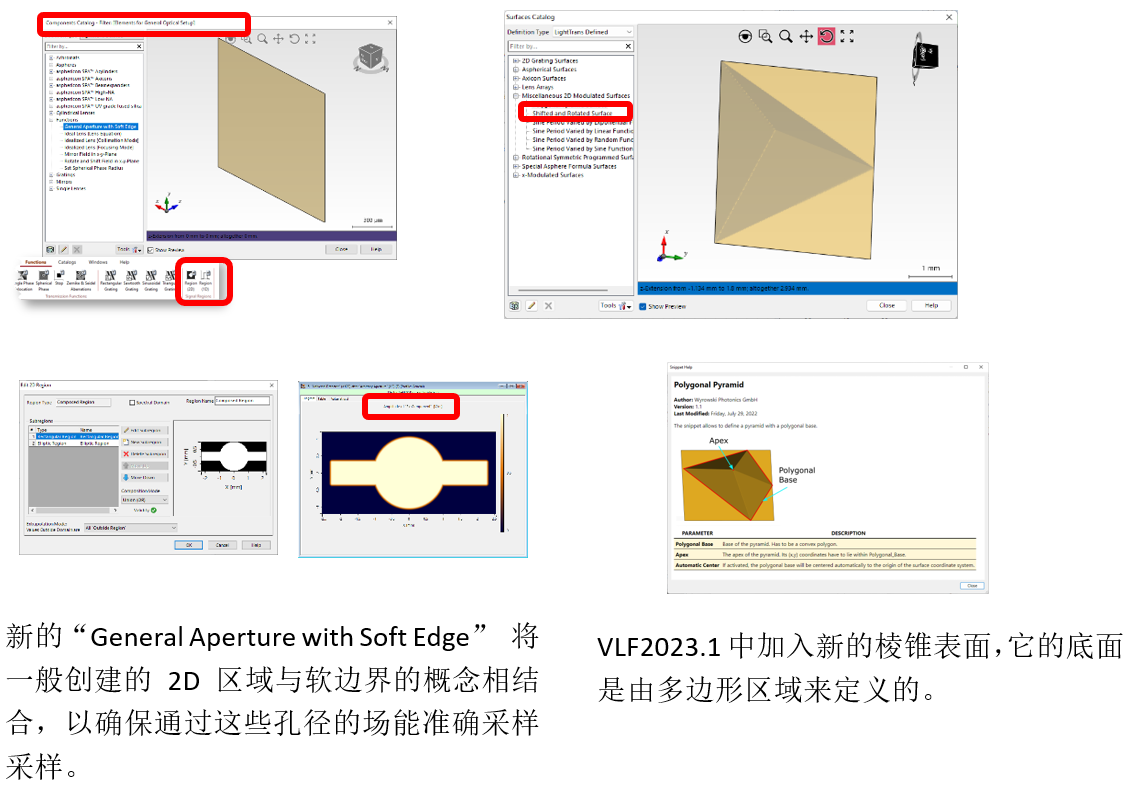
oYT�LC@98} ".$k�OH_�: �gh\u@�#$8 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
�T�K[[6IB� 处理日志 +y8Y@e��}> �Y6H?ZO�q 扩充版的处理日志 ~jzLw@"~$^ l!Xj UnRF a��^�@.C�5 • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
\G�>�C{�v; 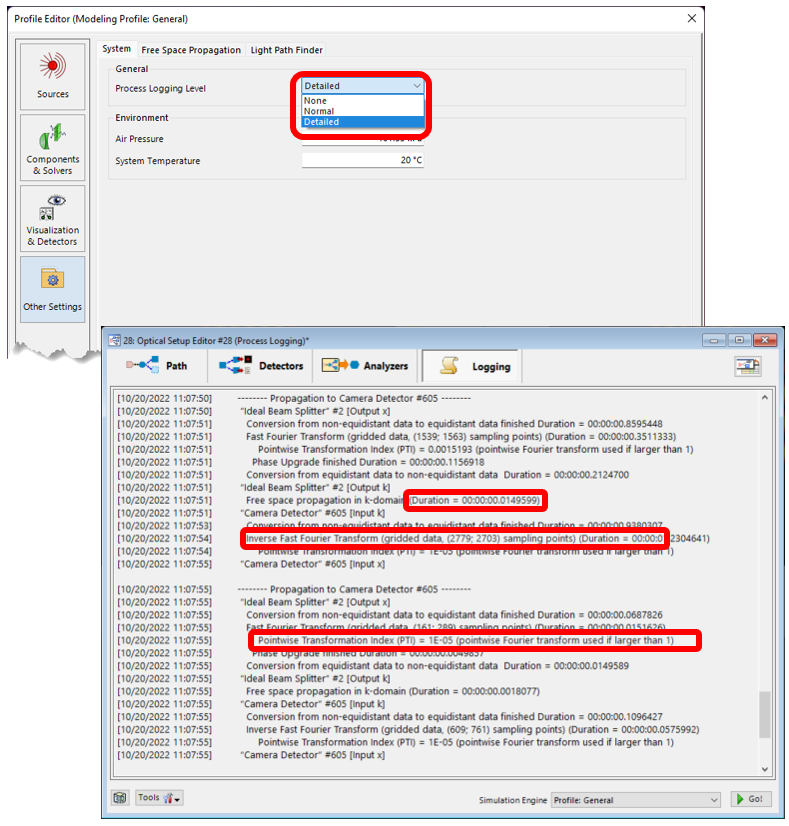 �Z�_4�%�Oi 9�N)I\lc�Y 系统仿真分析 N��{�Z��+� UhL1Y
NF�_
�Z�_4�%�Oi 9�N)I\lc�Y 系统仿真分析 N��{�Z��+� UhL1Y
NF�_ • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
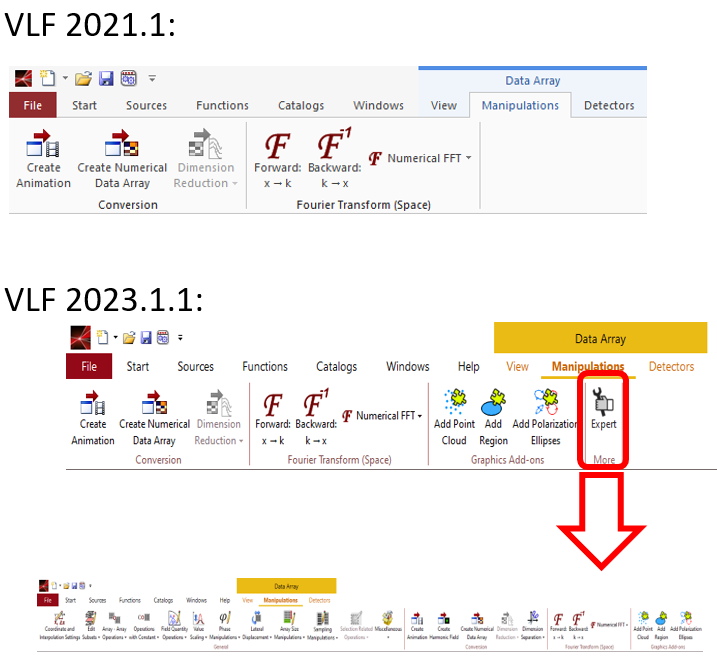
�tP*K�t'4W 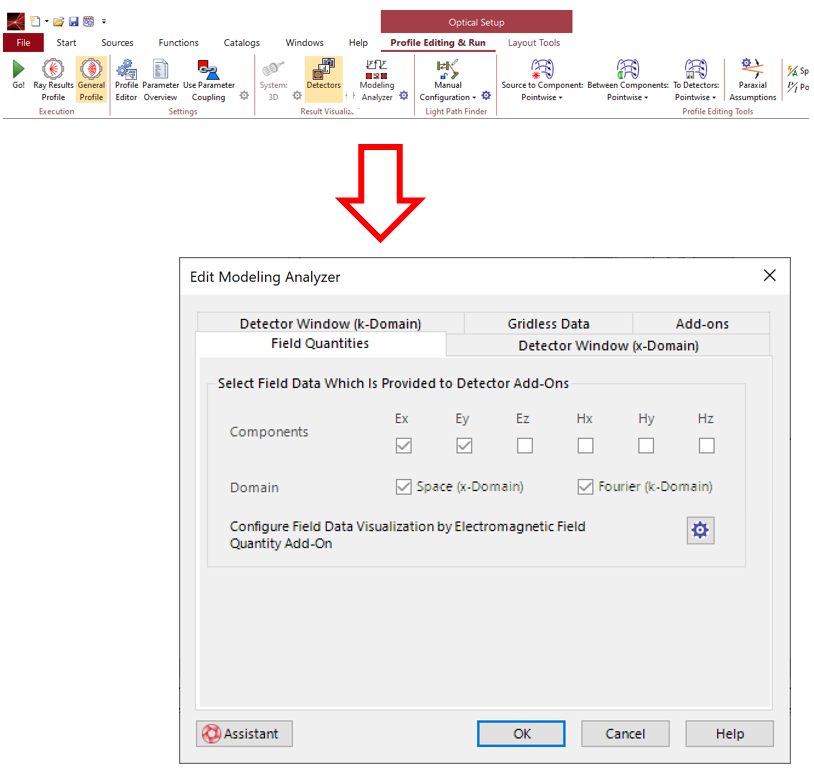 G��d��NhEv :�i?6#_2IC 专家模式(Expert Modus) [�~
�2�m*Q ��-d#08�\� 专家模式中的数据阵列’Manipulations’ XX�%K_p`&Z �h�k:>*�B} g�DLS)�4^w
G��d��NhEv :�i?6#_2IC 专家模式(Expert Modus) [�~
�2�m*Q ��-d#08�\� 专家模式中的数据阵列’Manipulations’ XX�%K_p`&Z �h�k:>*�B} g�DLS)�4^w • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
g�=X�y{Vm
 �*8?2+�)5" M.}J �SDt� 微小的改进帮助:新的计算器 P�658
XKE� Y�* rujn{ i]�?
Eq?k�
�*8?2+�)5" M.}J �SDt� 微小的改进帮助:新的计算器 P�658
XKE� Y�* rujn{ i]�?
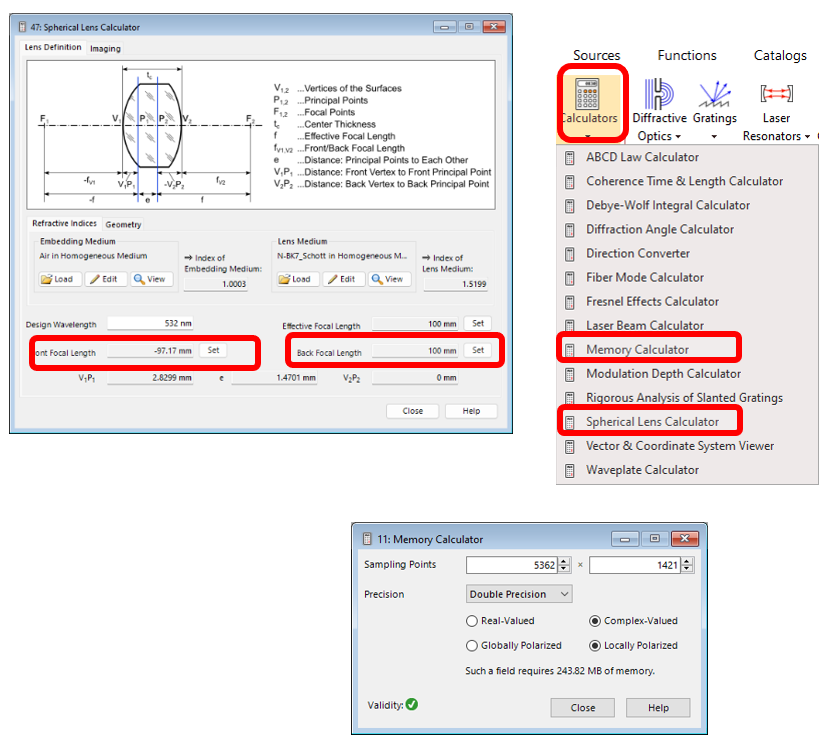
Eq?k� • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
�>| ,�`�E
 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



