2022 年 12 月,发布 VirtualLab Fusion 2023.1 ���[=1?CD� VirtualLab Fusion 2023新版本更新内容(三) ��3M*[a��~ 2023.1版本新特性一览 �1sLfjH hv Q4��:r�$
& 基本信息 �9k^=m)yS'
o5�x^�"�#�
 g�pvj'Ri7V
g�pvj'Ri7V  ���OYp�8r�
���OYp�8r� VirtualLab Fusion 2023.1新版本
主要更新方向 �:�{u�U�c�
 ujqktrhuLb
ujqktrhuLb
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 !jq6c��ND�
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: H�&�IP>8Dk
- 更快的速度 �2^�M+s\p�
- 更容易使用 �:|N�bk�58
- 融合更多物理光学模型 ^Jc0�c)�*�
- 更高的透明度 �;l?(VqX_E
- 多元的仿真控制选择 &.�4_4"l(
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 Zs|sPa�tV<
�u.Yb#�?��
1��AV�1W_"
功能概述(以下为更新内容的详细解释和案例展示): 6lAo`S\)eX
数据视图 A3p�Q?d[�
1�H
6Wri�k VLF 2023.1数据视图 8HA=O��?Cg �h*Tiv^a�� 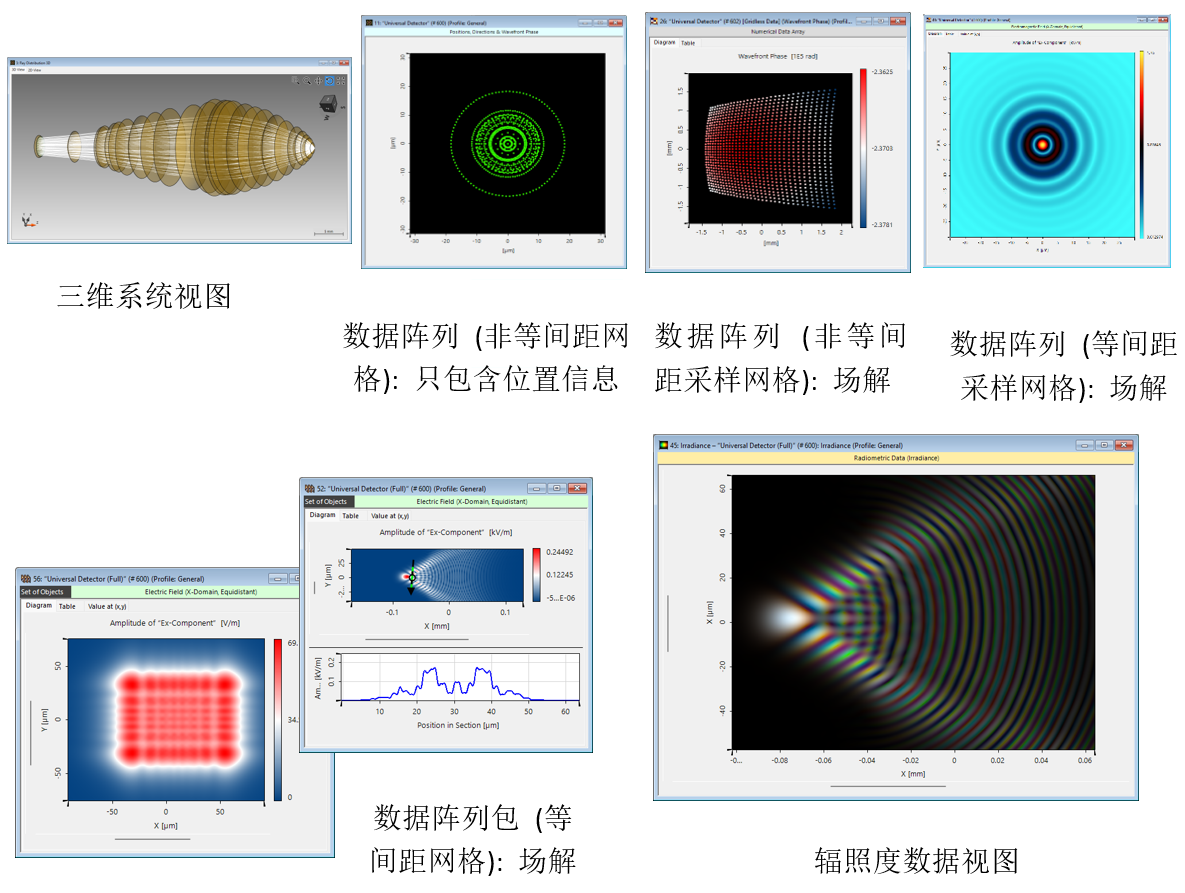 cGp �6�yf� B8Zd�#.6�] VirtualLab Fusion 2023.1数据查看方式 �BVp���.A]
cGp �6�yf� B8Zd�#.6�] VirtualLab Fusion 2023.1数据查看方式 �BVp���.A]
;<<�IXXKU�
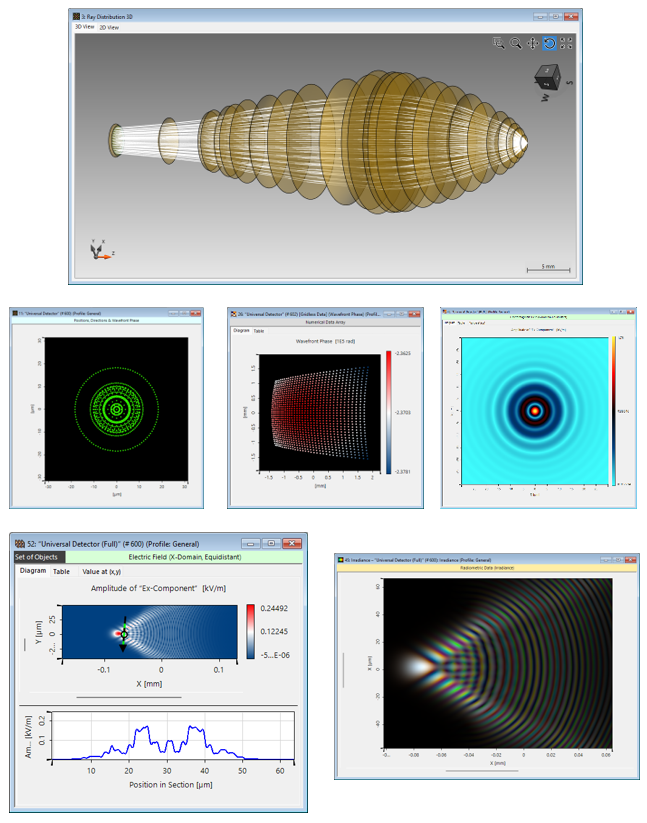 �*�~^^A9C8 K+OU~SED%F 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 6l7�a9I�J� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 �.WE0T|qDX 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 94�@�!.11� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 --��FtFo�� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 6Y�mk�8.PF
�*�~^^A9C8 K+OU~SED%F 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 6l7�a9I�J� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 �.WE0T|qDX 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 94�@�!.11� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 --��FtFo�� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 6Y�mk�8.PF
5&@���U� T
4�34��4PBj
三维系统视图: 新的对话框以及设置选项 p<1�9 Jw<�
hI�{Yg$H�1 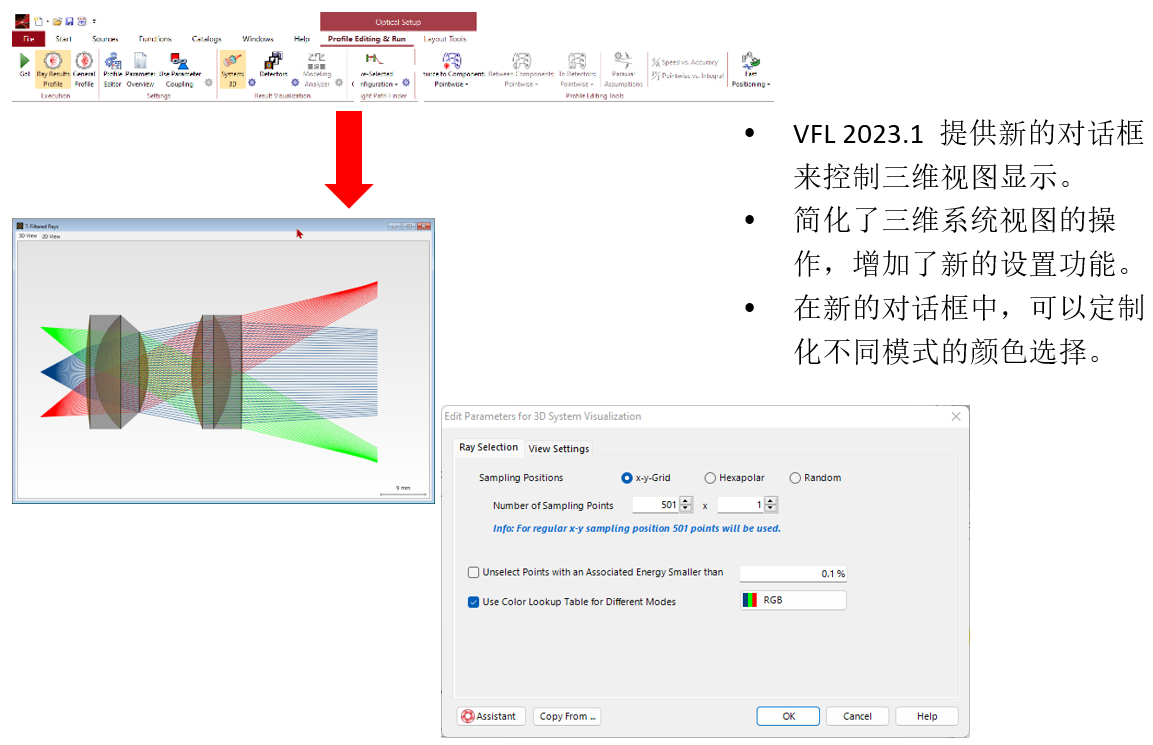 �,�sl.:C�4 Nq�6�CvDXi 数据阵列视图: 像素数据(Pixelated Data)平滑 i�=Qh�X�CM ".<p R}
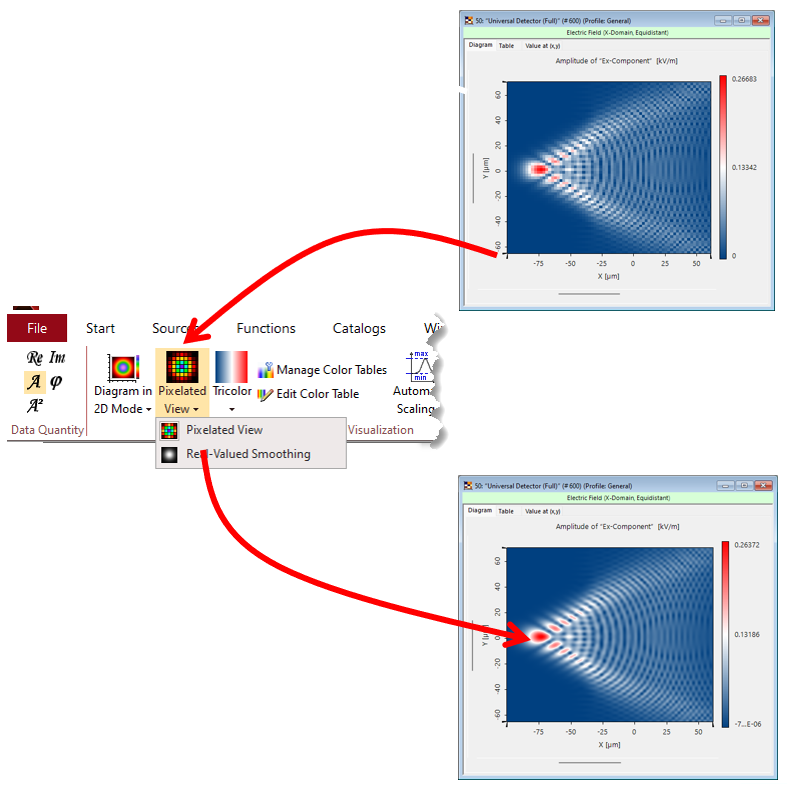
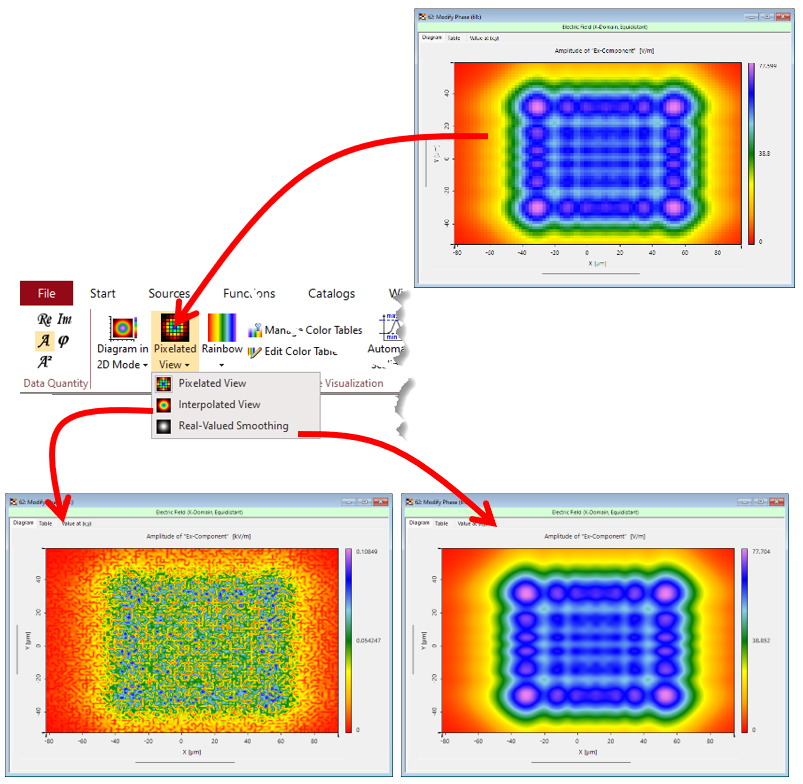
qp • 探测器中的像素越少,探测器评估速度更快。 ���%BLKB%5 • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 >@�u�YleD( • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 �4�]�Kc�eE 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 { r�n~D5�R
�,�sl.:C�4 Nq�6�CvDXi 数据阵列视图: 像素数据(Pixelated Data)平滑 i�=Qh�X�CM ".<p R}
qp • 探测器中的像素越少,探测器评估速度更快。 ���%BLKB%5 • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 >@�u�YleD( • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 �4�]�Kc�eE 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 { r�n~D5�R
oP
0j>i,"&
 �P[i�/�o#�
�P[i�/�o#�
{�H�nOUc\4
数据阵列视图: 像素数据(Pixelated Data)光滑化 CN�YchE�,}
T9?_� `h��
V�= PoQ�9d
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 m
0�P�F�"(
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 �tH(#nx8��
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 '~J6�mo�jE
�;�A!i V�|
 y�Q50�f~�9
y�Q50�f~�9
{!h[�@f4��
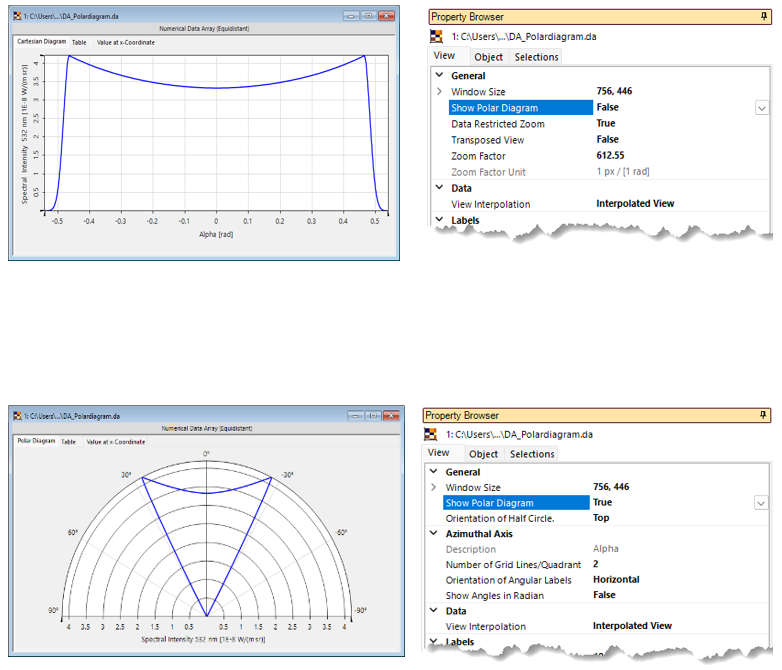
数据阵列视图: 极坐标图(Plolar Diagram) mH� ���.I!
R���A/y�vr • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 g\'84:*�J\ • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 s.�
[${S6O • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 M�sQS{ok�+ • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 B.#�0kj�A}
8t!�"K_Mkx
 ����t��m?
����t��m?
IR�a*�}MJe
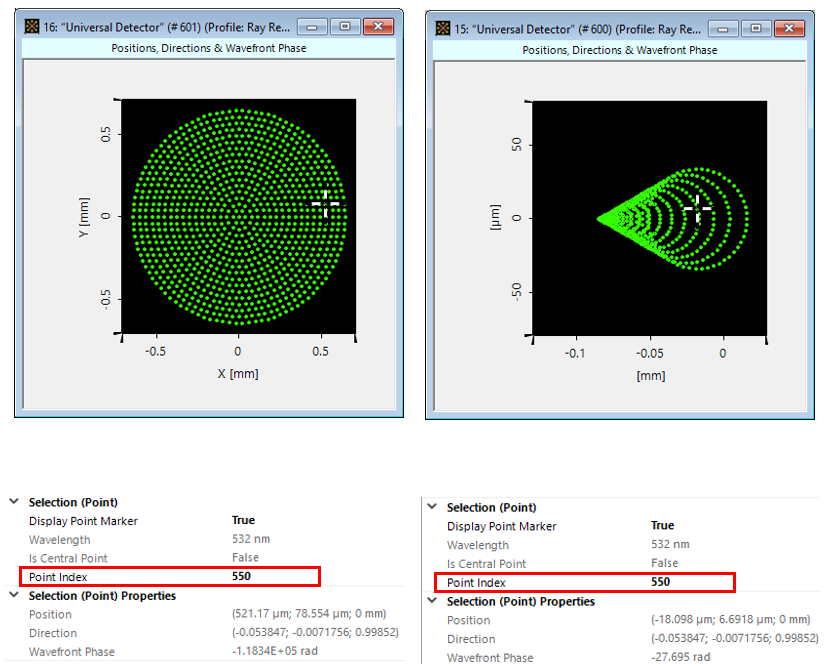
数据阵列视图:找寻以及点的标识 8<!9mgh���
��8�w'��8n
�y�l%�F<�5
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 E@KK\m
�\e
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 �m�(Ynl=c
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 ^pa).B.`T�
my6T��@0R
 �;�@hP*7Lm
�;�@hP*7Lm
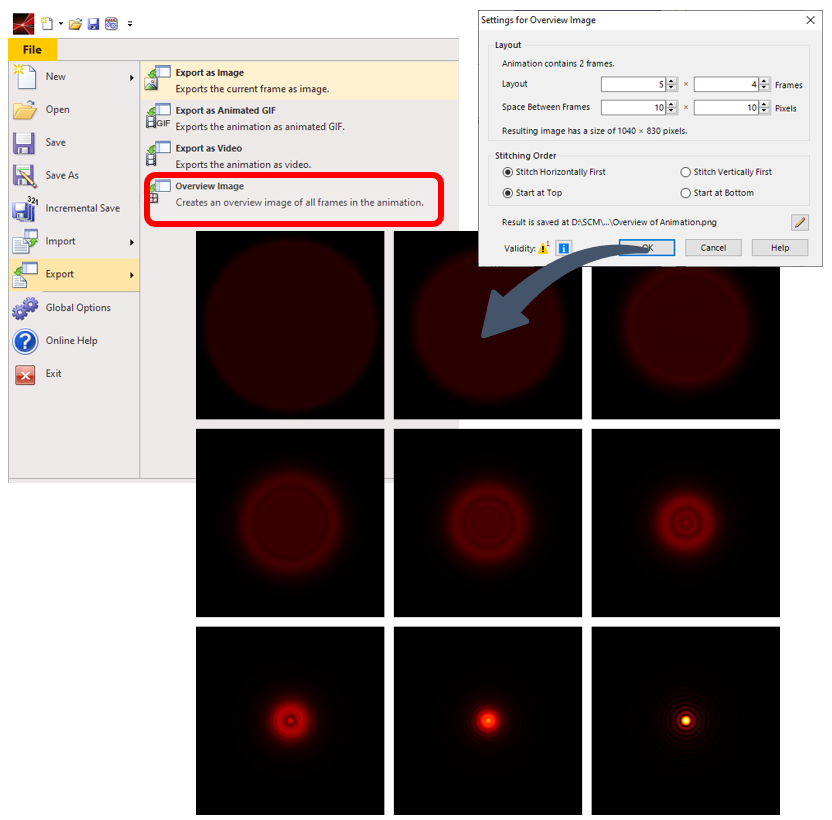
i���,T{SV 导出图像的概览 Rw`s O:eZ� >�0oc=9H8� dD��%��m=x
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 nv]64mL3��
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 GkFNL��M5'
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 B�#yyO>0k] PV29�0��4
 �ntejFy9_�
�ntejFy9_�
i^l;�PvIF
数据阵列视图: 更多的新功能 S\�m]�z�e
�C��2�v7�(
NYeg�,{�q�
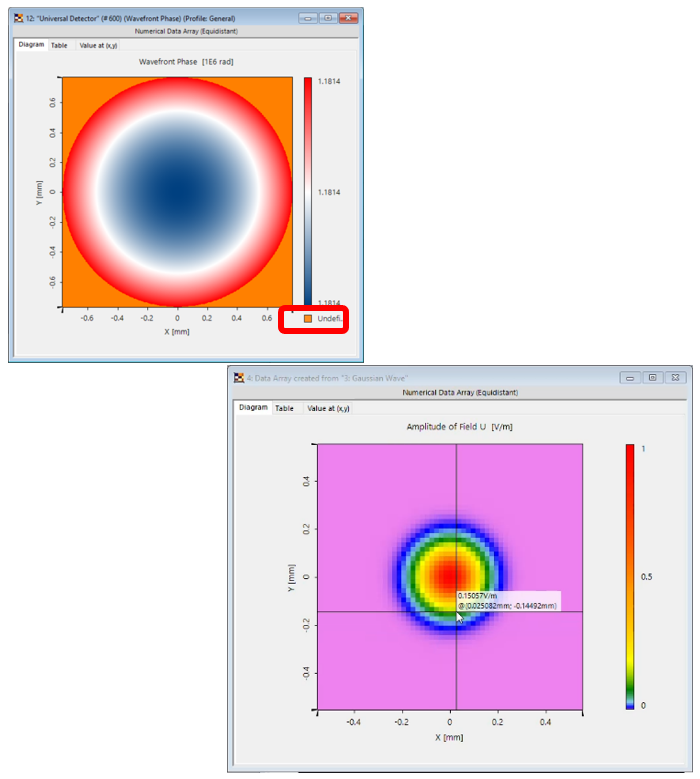
• VFL2023.1可以对未定义区域填充不同的颜色。 B?'ti{p
A9
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 R?Qou!*�]�
Tw5Bv��B1�
 VK#�z�mEiB
VK#�z�mEiB
v��5o%y�:~
Graphics Add-ons提供更多数据视图选择 JV�>O�mUAk Jo0x/+?,+� I�� j� /�J
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 �V*~5�*OwB
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 x&�d<IU)5
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 yr�X]w3kr% p
pq#5t^[) 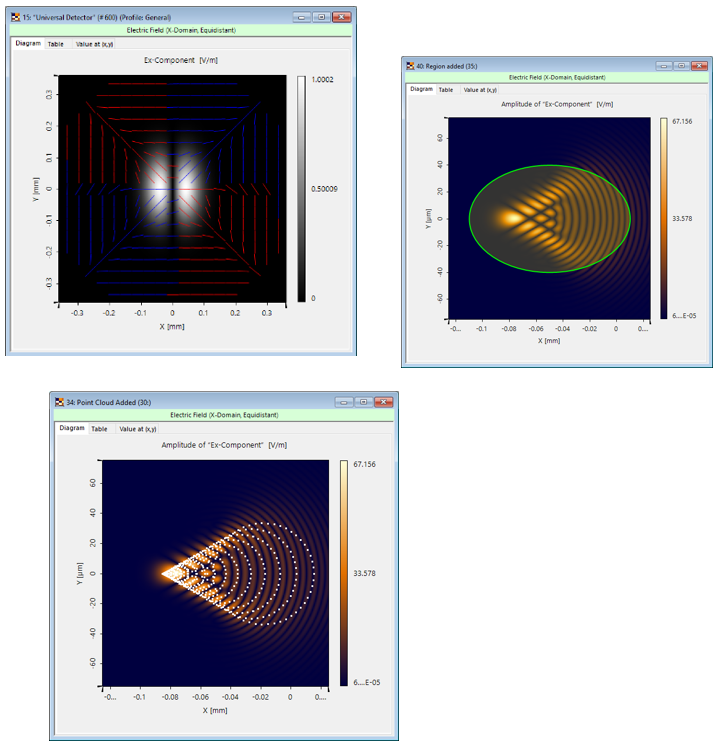 u[D�V{�o�� �-E1}mL}I` a=R-F�!P�) Graphics Add-ons提供更多视图选择 M*N8p]3C�q `�g~�-5Z~J
u[D�V{�o�� �-E1}mL}I` a=R-F�!P�) Graphics Add-ons提供更多视图选择 M*N8p]3C�q `�g~�-5Z~J • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
Z�SNg^�)cN • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
gNeCnf#Xa • 图像组件提供了多样化的配置选项。
K2QD&!4/T2 p=z���m_+= 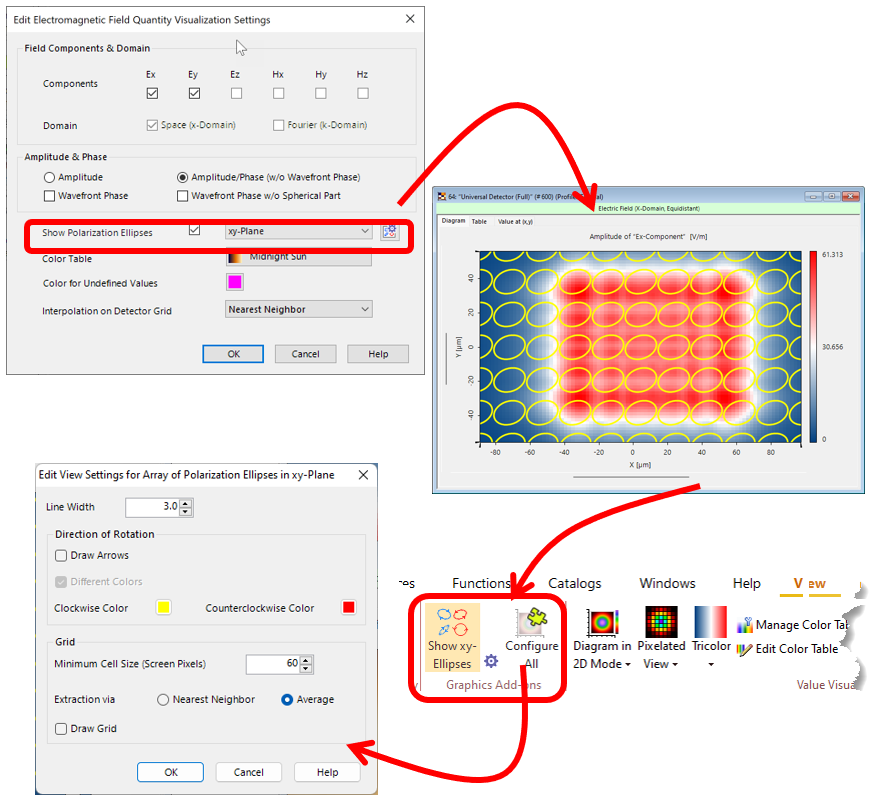 .uP$�M(?�j :lAR;[WF�S >+��r2I�%� Graphics Add-ons: 增加了 Point cloud 功能 {`��L�V{�! <#U��vLl�l 1t�DN$r�M5
.uP$�M(?�j :lAR;[WF�S >+��r2I�%� Graphics Add-ons: 增加了 Point cloud 功能 {`��L�V{�! <#U��vLl�l 1t�DN$r�M5 • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
���K�5$ �y 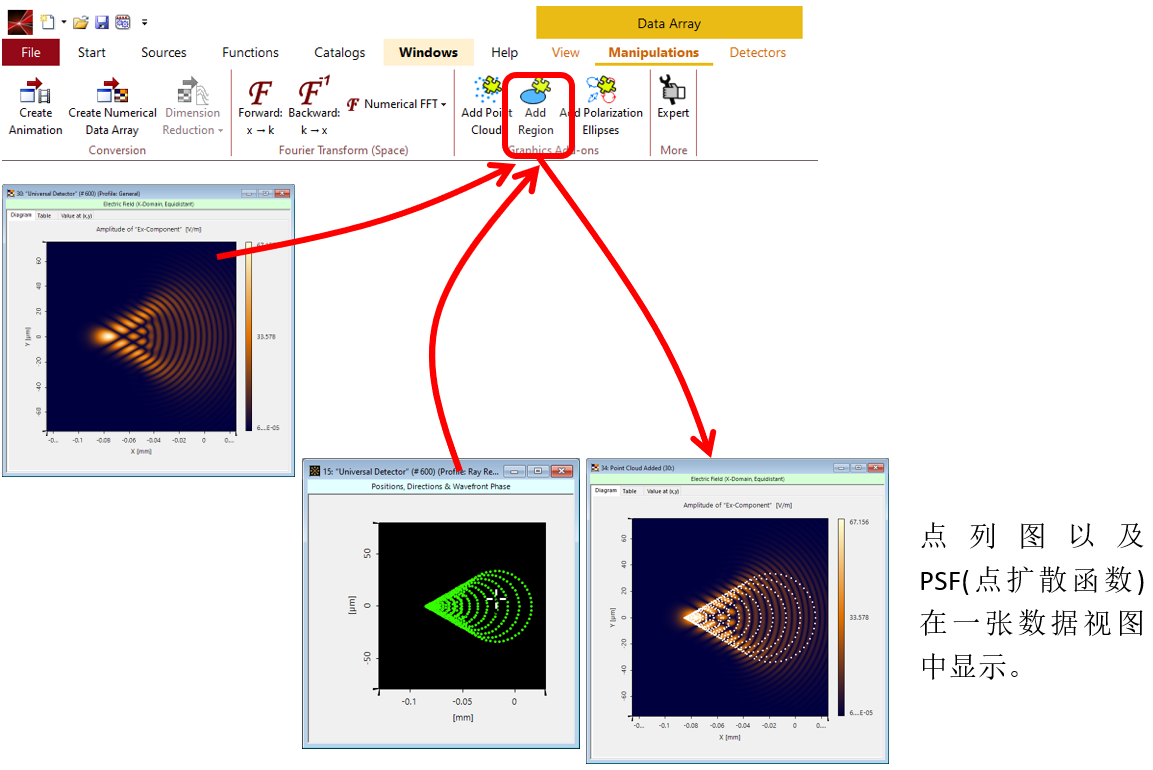 z,tax`��O �H��;�6V�� VirtualLab中的区域 (Regions) ~>�n<b1}�W `��xS�XGI O�_ c��K�4
z,tax`��O �H��;�6V�� VirtualLab中的区域 (Regions) ~>�n<b1}�W `��xS�XGI O�_ c��K�4 • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
`�6/7},"9t 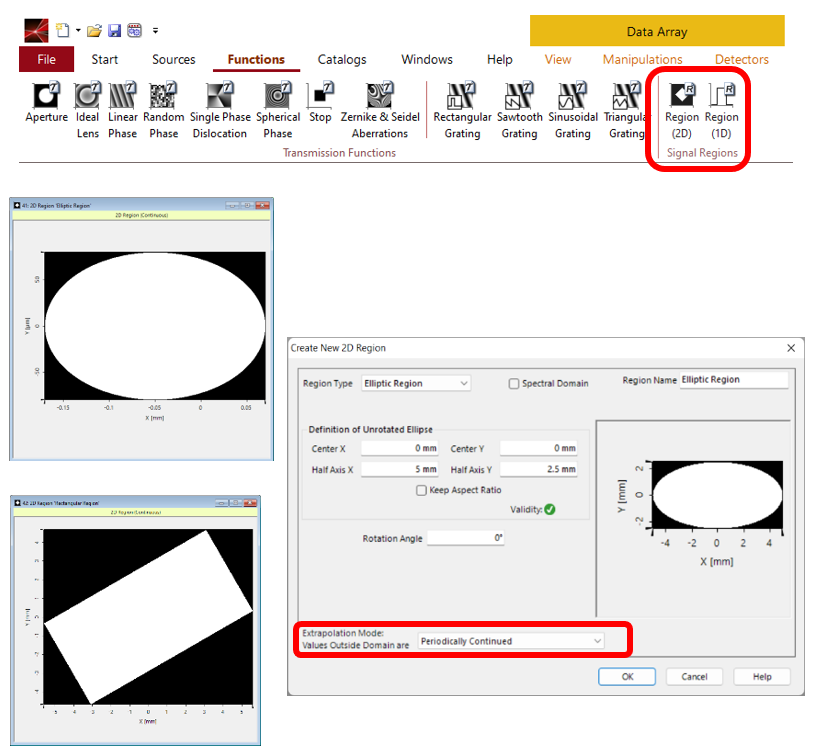 k���8TMdWW IYW�D_}_
$ ?S_S.�B�d� Graphics Add-ons: 添加区域(Add Region) RwE�]t$�T/ (�:��1��j- wa��C%o%fD
k���8TMdWW IYW�D_}_
$ ?S_S.�B�d� Graphics Add-ons: 添加区域(Add Region) RwE�]t$�T/ (�:��1��j- wa��C%o%fD • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
�Ud]�(hp"� 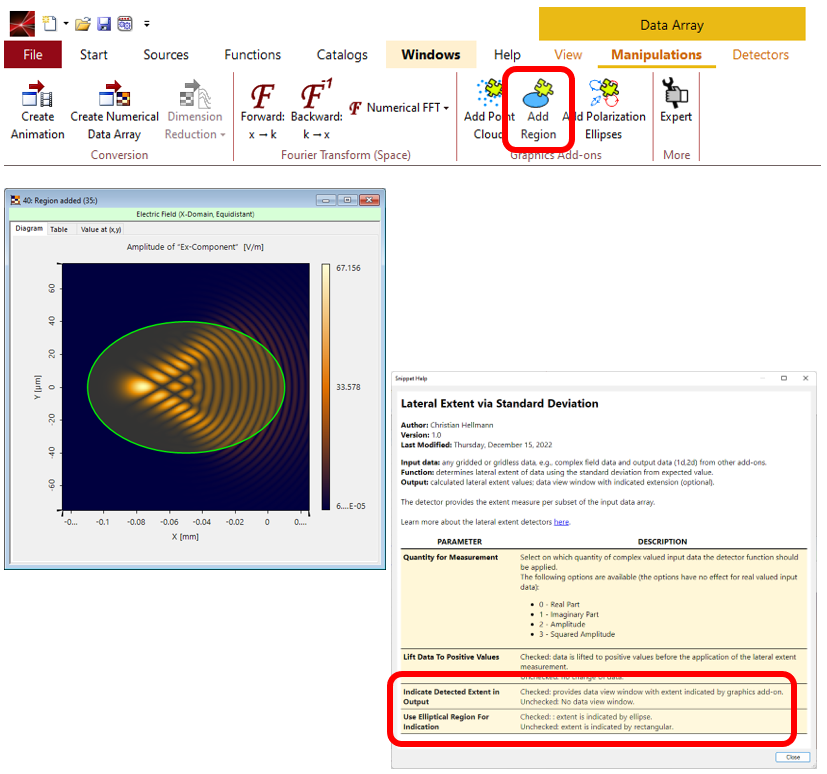 :MVD8�3?4 ]WG�\+�1x9
:MVD8�3?4 ]WG�\+�1x9 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
aF:I]]TfK~ �<��
5ow81 Graphics Add-ons: 添加区域(Add Region) iAN#TCwLT7 �t`�?FS��V �]mp.K�v�B • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
W���q4?`�{ U��;(&!Ei 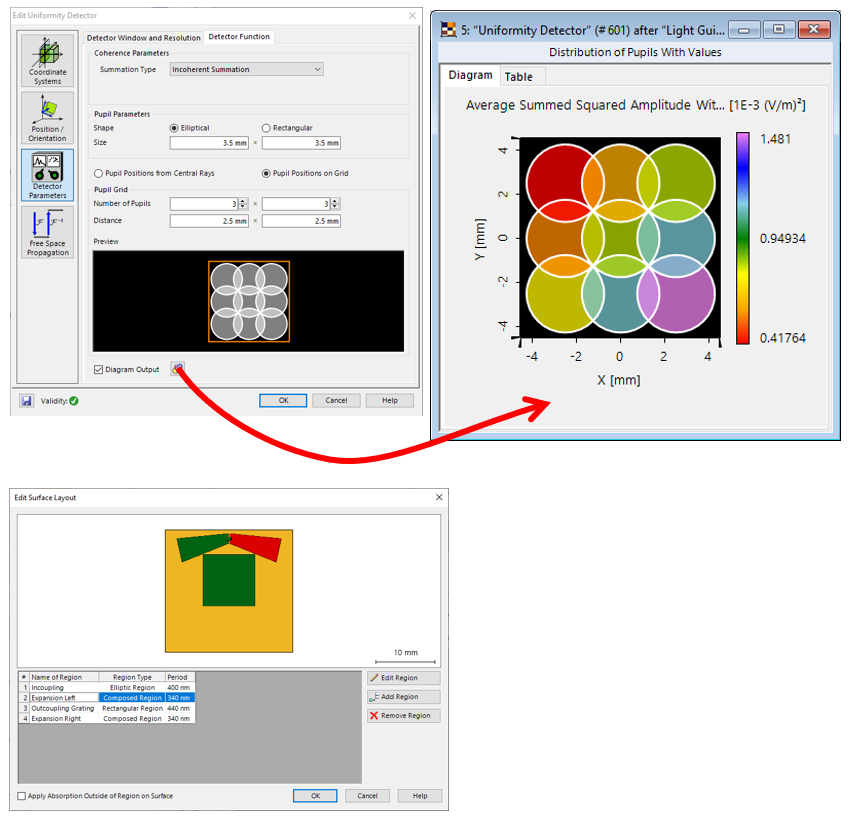 �#ua��#$&p
�#ua��#$&p • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 �}IV7dKz�l iG�;6e�~�p C8?/$1�|RL • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
[8"nRlX��H • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
p�O^
�6p�% 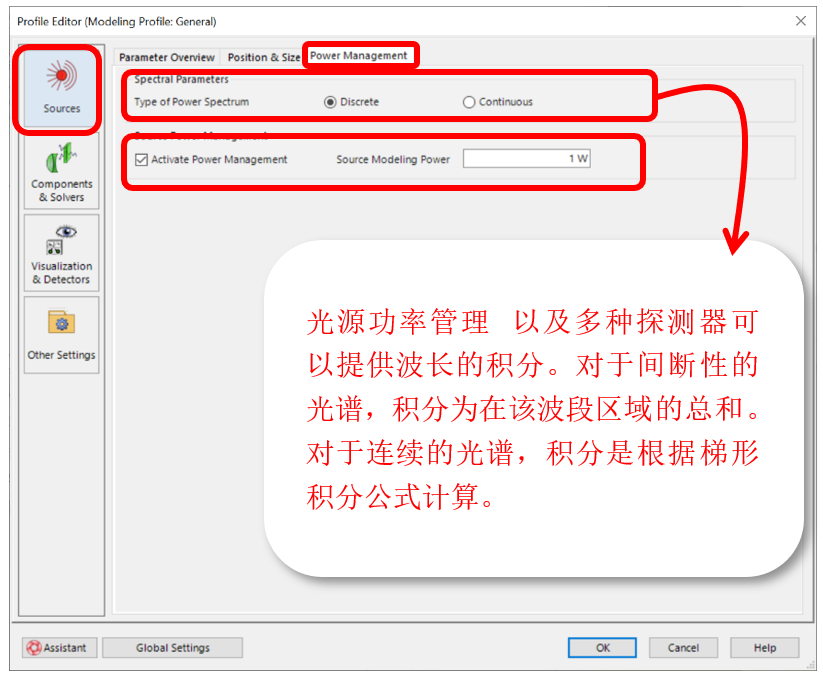 ��<AVpFy�
��<AVpFy� • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
G~�JQcJFj 1. 针对给定光源参数,进行光源功率的评估。
�Na=q(O�KN 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
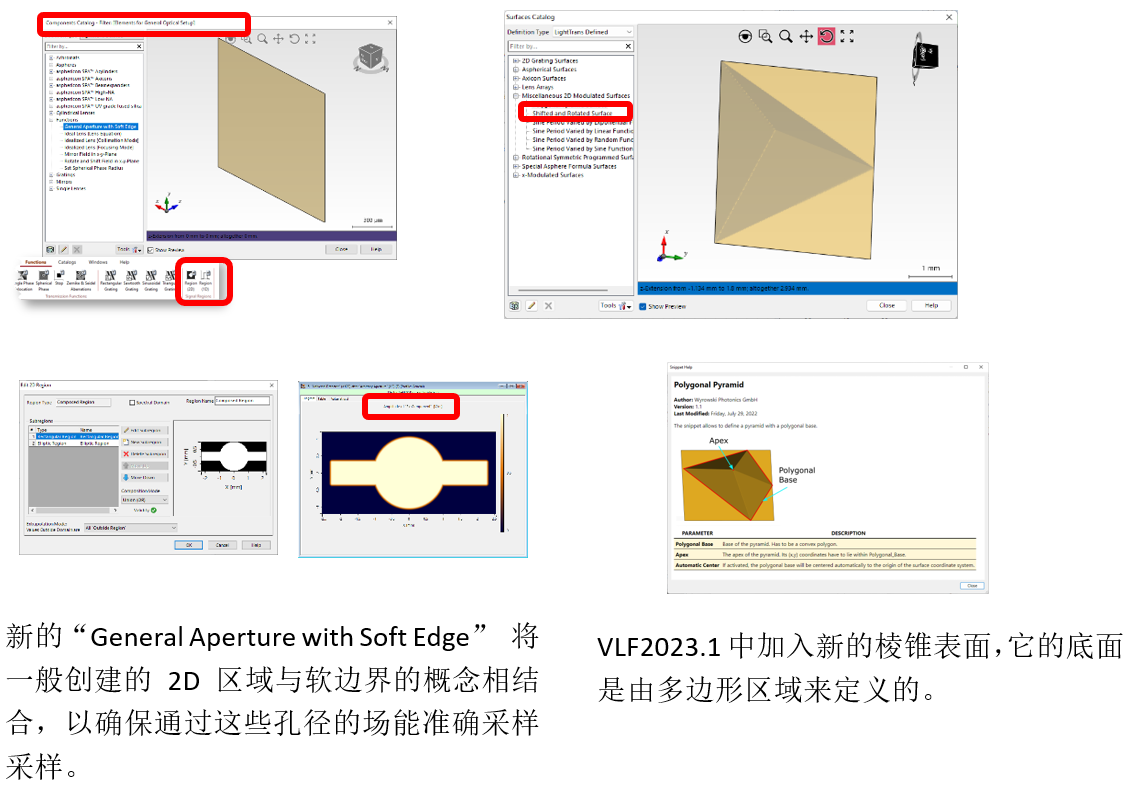
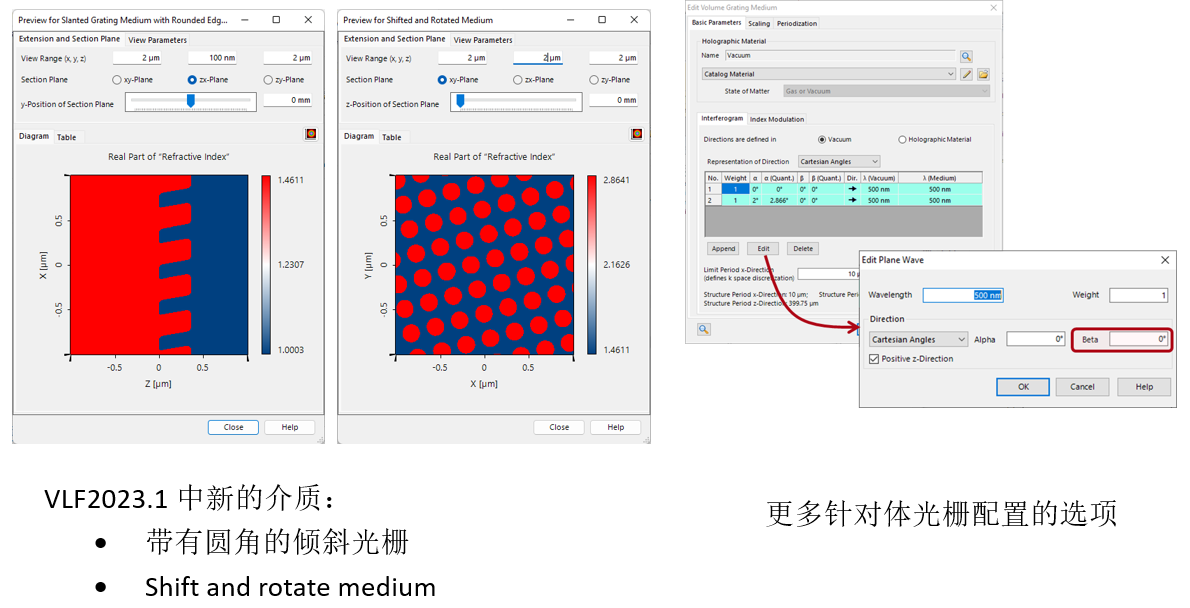
yoH6g?!��O =X`/.:%�|[ 组件 /4�|�qfF3� 组件(Component)新的特征 u�^���� T2 �GcKJpI\sB e1H.�2n{y^ • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
'� o�5,P/6 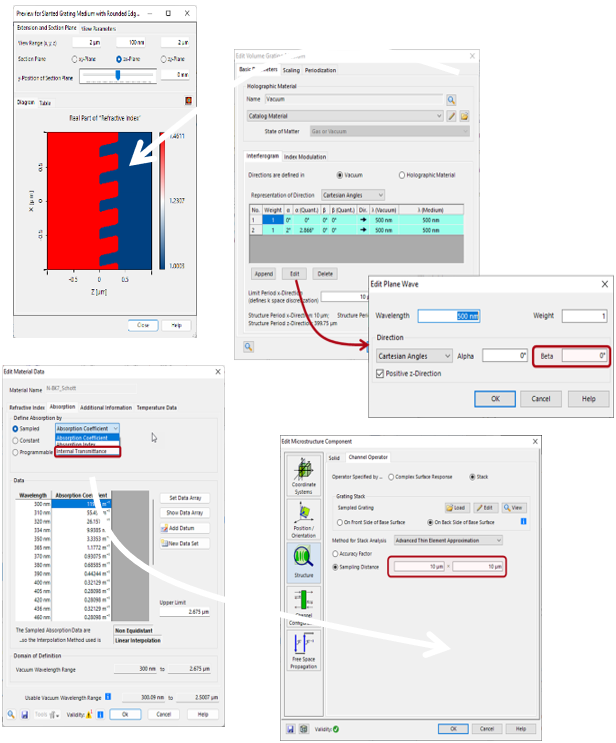 �g��$�<�@! .(s�T?M`\J 组件(Component)新的特征 yCz�?�V[49
�g��$�<�@! .(s�T?M`\J 组件(Component)新的特征 yCz�?�V[49
t�h]9@7UE,
 ��
I{E1�0;
��
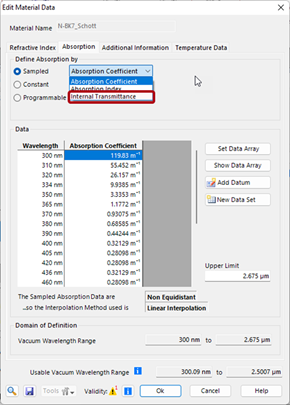
I{E1�0; 吸收特性可以用采样数据定义吸收率以及透过率。
Z�#F2<*+Pe cv^^�Ng�Q� 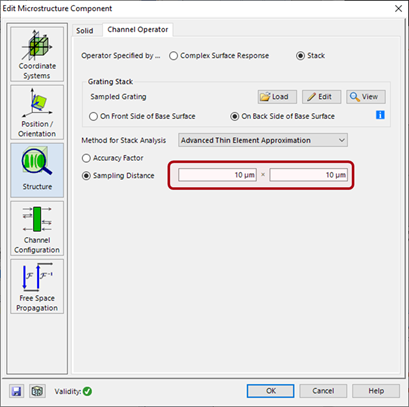 d�LA�ElTg� ��M4QMD;Ez
d�LA�ElTg� ��M4QMD;Ez 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
V3jx{BXs2 eC�1���cE� 组件(Component)新的特征 k��,�r\^1h
pd|c7D!6U,
 E�_h��9�y� �ZXco5,1�� 组件(Component)新的特征 f[.]�JC+�,
E�_h��9�y� �ZXco5,1�� 组件(Component)新的特征 f[.]�JC+�,
6g�p3n�;�D
 �xQN](OK�G y"7?]#$�9/ 组件(Component)新的特征 5�!Az��EB
�xQN](OK�G y"7?]#$�9/ 组件(Component)新的特征 5�!Az��EB
Bdq�/Ohw|!
 ?-��(E$l�l >���iq^Ts� W
n�VX)��o
?-��(E$l�l >���iq^Ts� W
n�VX)��o 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
4b��4nFRnH 处理日志 ZJ!/49c*>� �#��Z���fg 扩充版的处理日志 �d/�;oNC+ nO�OA5Gz�� �Qd@`�jwjS • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
��5H<�r�I? 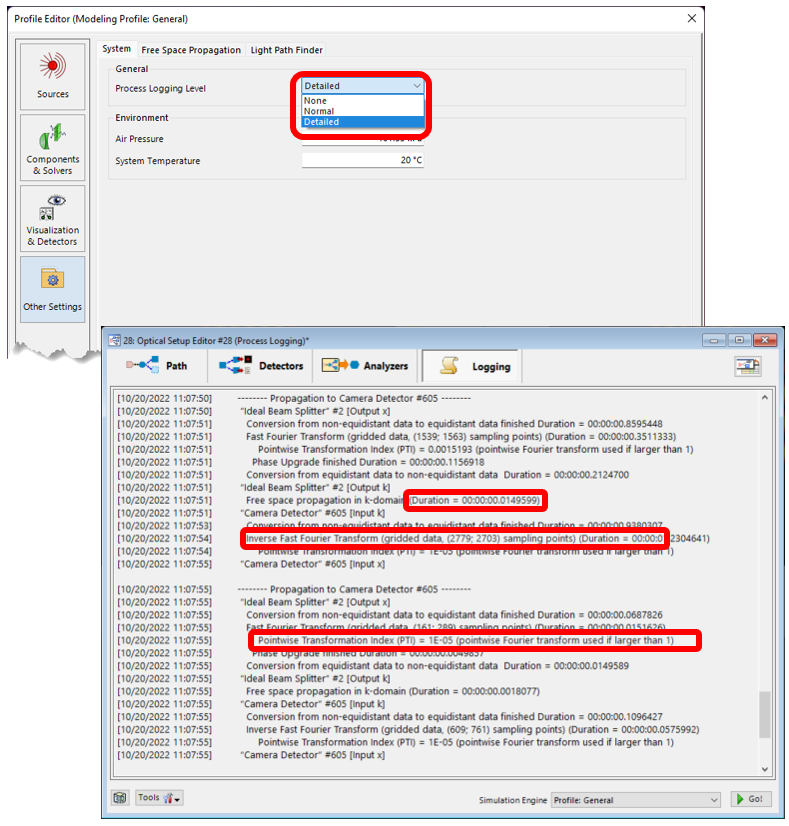 4Jw0m#UN1� ?��4�xTA
系统仿真分析 {d�A#r>z\1 Y2Tg>_:t �
4Jw0m#UN1� ?��4�xTA
系统仿真分析 {d�A#r>z\1 Y2Tg>_:t � • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
eX}�u�ZR� 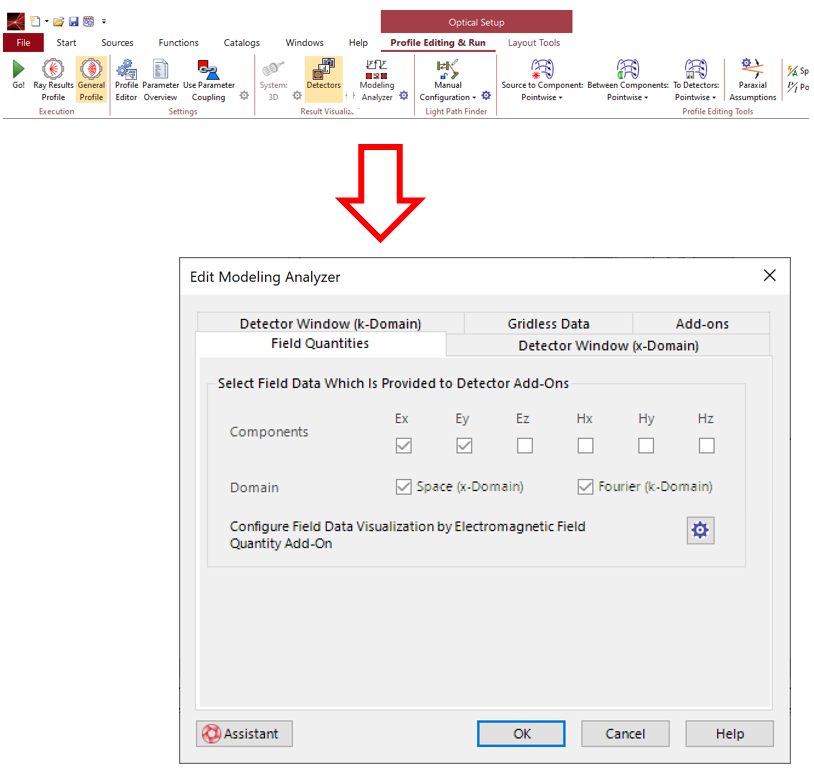 qgu.c`Gm�W 6�N]v9�uXZ 专家模式(Expert Modus) ��s�B /*gO z7J#1q~:yY 专家模式中的数据阵列’Manipulations’ %GAEZH,2sG �>V �N��MQ ��)u<s�EF�
qgu.c`Gm�W 6�N]v9�uXZ 专家模式(Expert Modus) ��s�B /*gO z7J#1q~:yY 专家模式中的数据阵列’Manipulations’ %GAEZH,2sG �>V �N��MQ ��)u<s�EF� • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
/\2��s%b*� 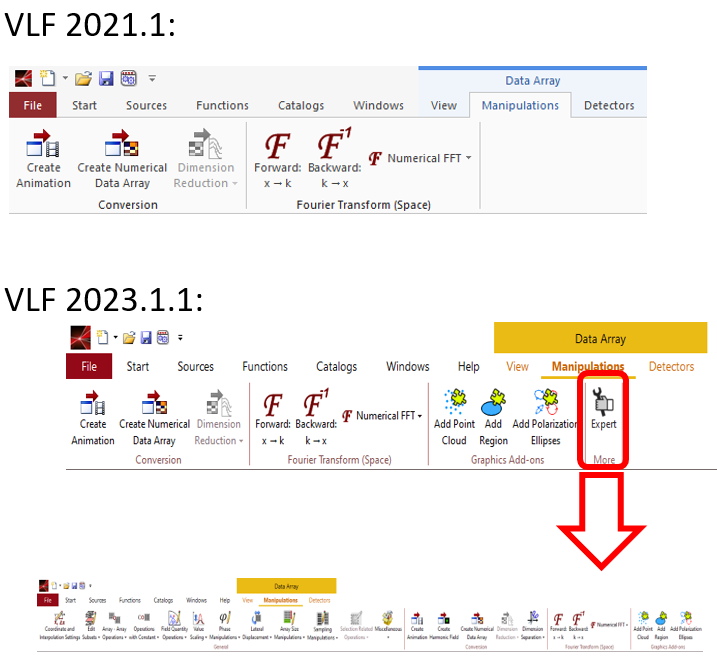 Jln� dy�pE _w�(SHWh2� 微小的改进帮助:新的计算器 4j/8�O�t�n ��n-�p|7N� r]���2}S=[
Jln� dy�pE _w�(SHWh2� 微小的改进帮助:新的计算器 4j/8�O�t�n ��n-�p|7N� r]���2}S=[ • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
l�B,�.�TK� 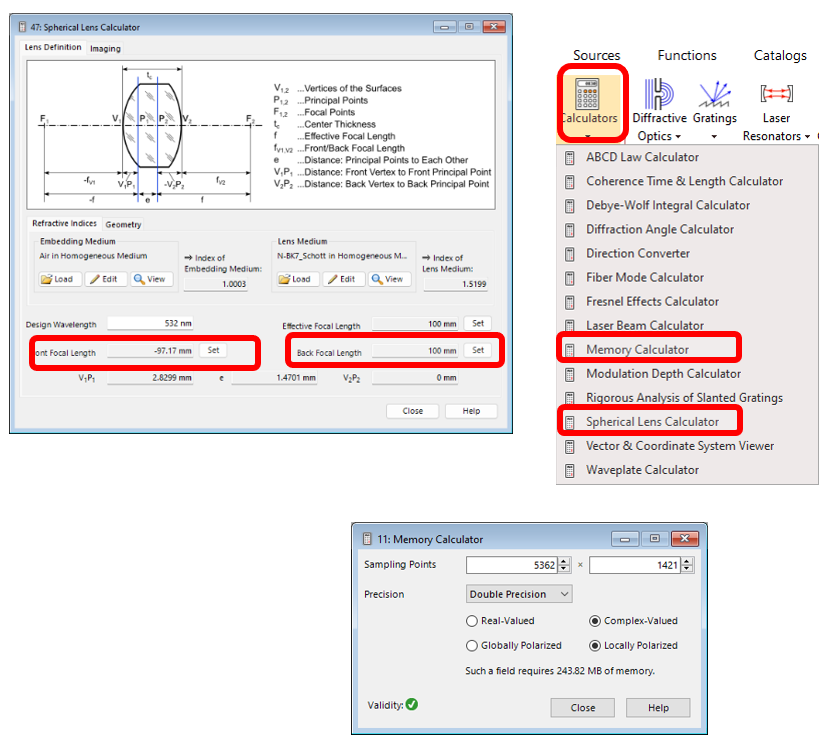 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



