2022 年 12 月,发布 VirtualLab Fusion 2023.1 /;�AZ/Ocy! VirtualLab Fusion 2023新版本更新内容(三) �UMuu�f6�� 2023.1版本新特性一览 uxyT�u2L7 Wi[m���`#� 基本信息 *xg`Kwl5Kl
xwnoZ&�h�
 T_?nd ��T2
T_?nd ��T2  Jh4&Q�h�|t
Jh4&Q�h�|t VirtualLab Fusion 2023.1新版本
主要更新方向 ]A�7��2)�1
 ��_/��}Hqh
��_/��}Hqh
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 ,�LW�+7yD�
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: i9�eyrl+�!
- 更快的速度 /�J.\p/%\
- 更容易使用 �j;20JA/b
- 融合更多物理光学模型 q{cp|#m#�G
- 更高的透明度 :X1cA�3c�!
- 多元的仿真控制选择 6f?�BltFaN
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 a3��UPbl3^
�l>D-�Aa�n
��TcD�[Teu
功能概述(以下为更新内容的详细解释和案例展示): =r�@gJw:B�
数据视图 sr+gD�*�@h
�R6q4 �[�" VLF 2023.1数据视图 >H�}jR[H'� ���6�!+X.+ 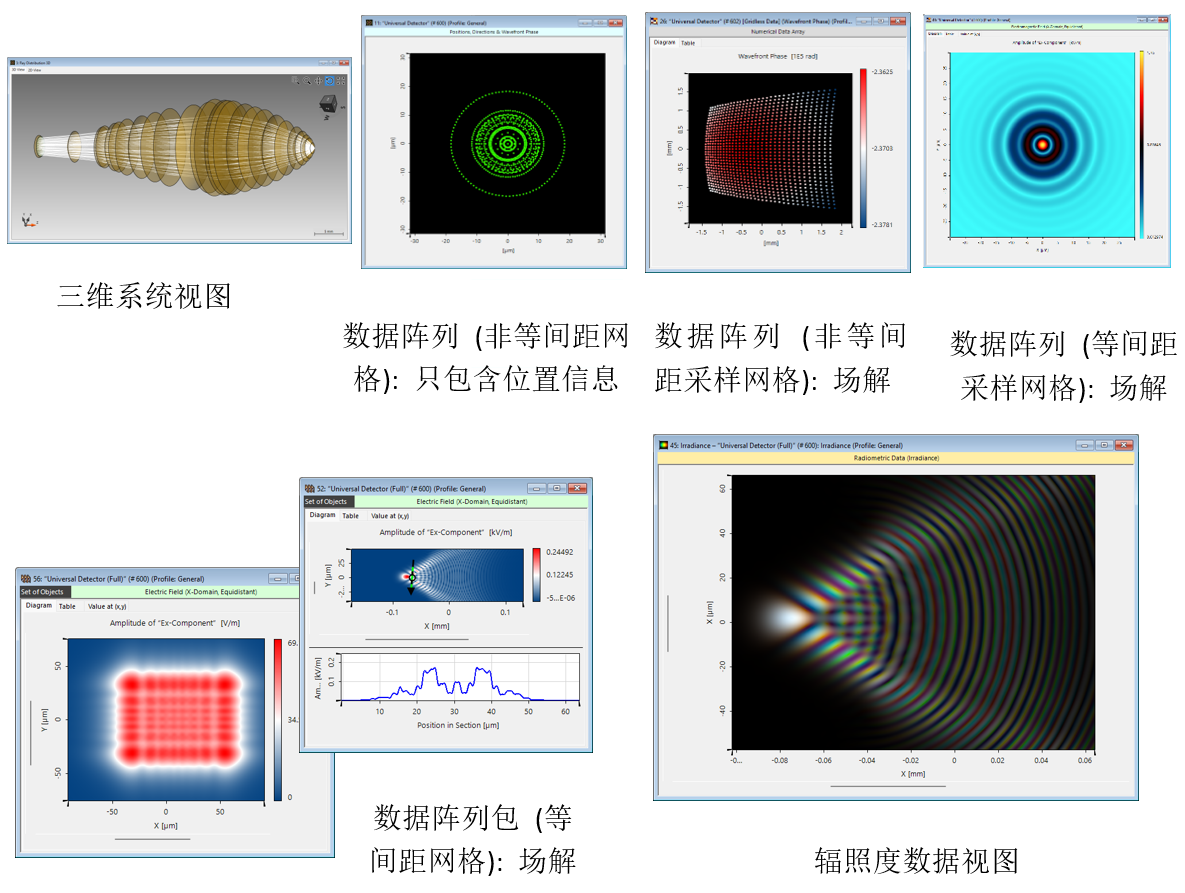 wKk�
3)@il i��)7n� �c VirtualLab Fusion 2023.1数据查看方式 A�{z�>D�`d
wKk�
3)@il i��)7n� �c VirtualLab Fusion 2023.1数据查看方式 A�{z�>D�`d
�T�+;�H#&�
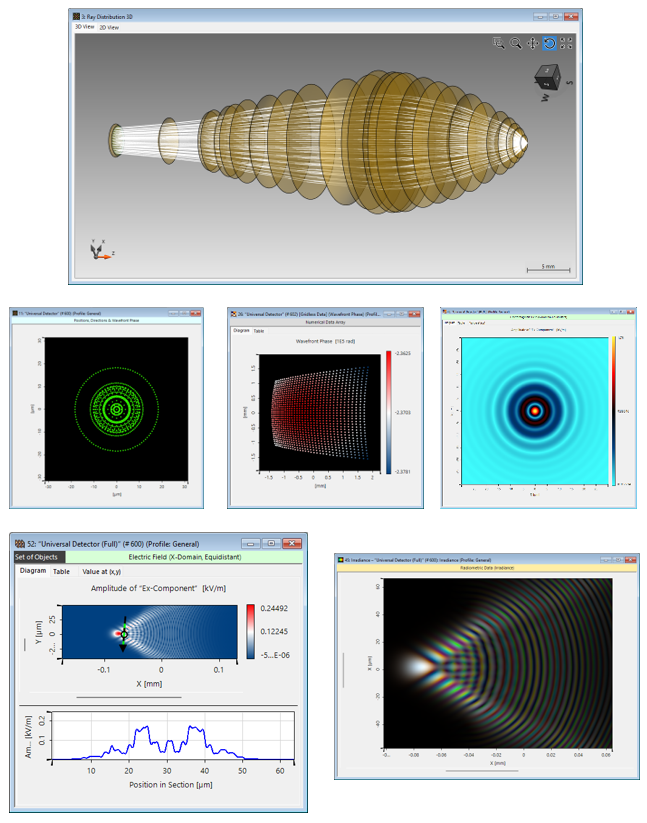 4YD��T%_h0 QSH�Jmk 6L 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 S�qX�y;S@� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 q]"2�hLq�� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 X-kXg)!B�g 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 6|
*(dE2x( 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 C}�b|2�y��
4YD��T%_h0 QSH�Jmk 6L 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 S�qX�y;S@� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 q]"2�hLq�� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 X-kXg)!B�g 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 6|
*(dE2x( 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 C}�b|2�y��
�M*5,�O���
EI1W
.V>�@
三维系统视图: 新的对话框以及设置选项 tYs8)\���{
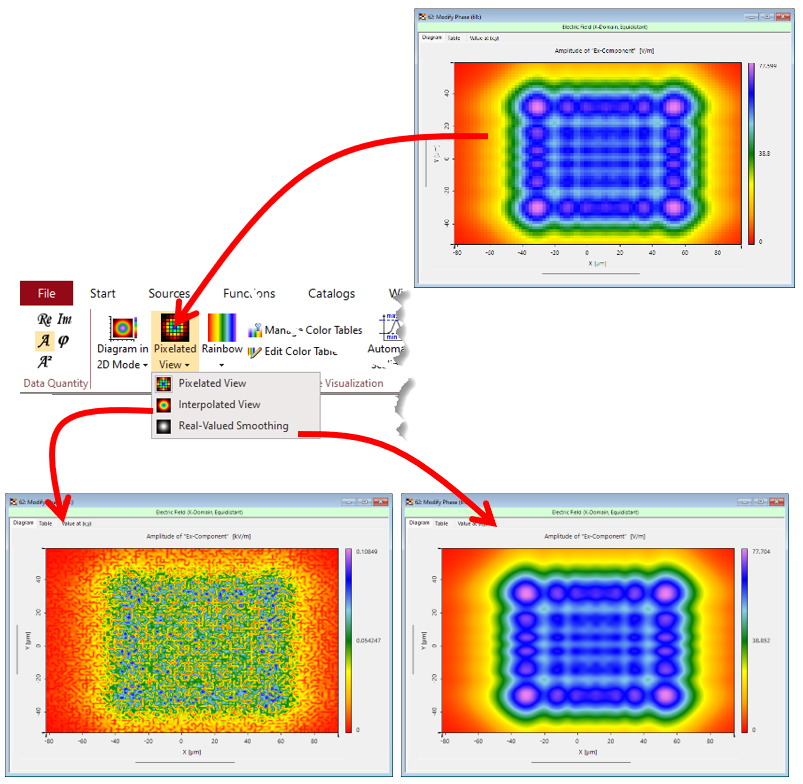
@[�M�O,J&h 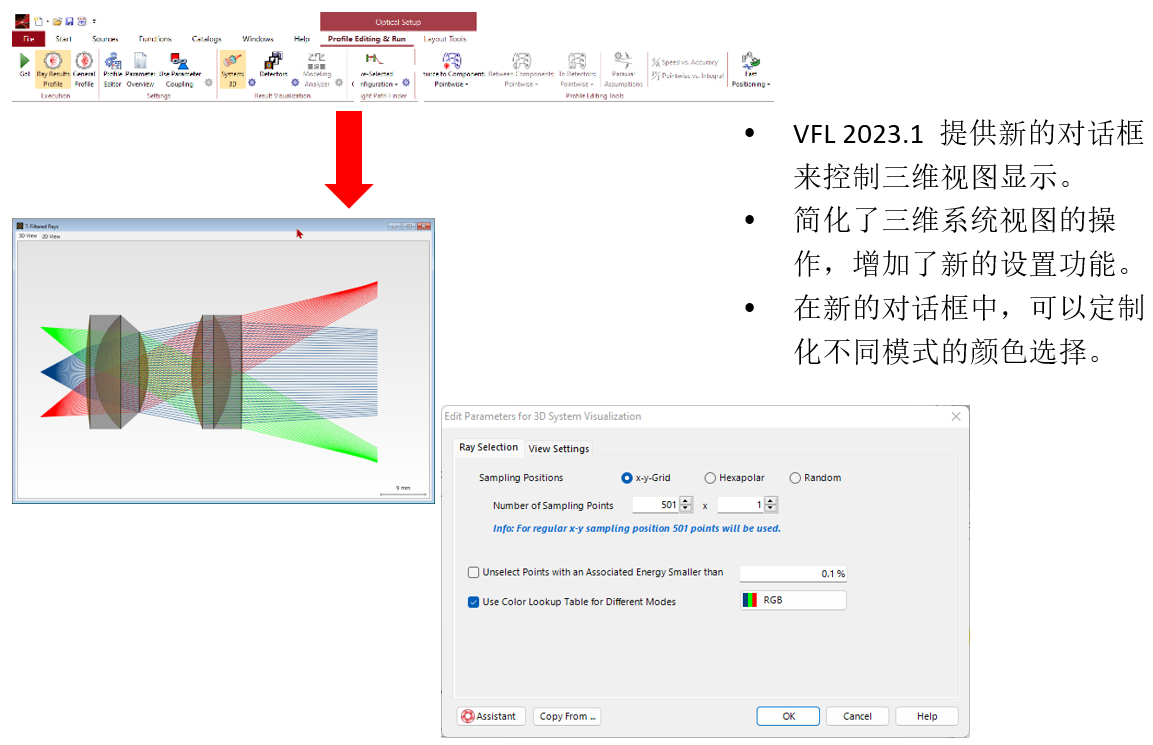 O87"[c��`> *��8$>W�hr 数据阵列视图: 像素数据(Pixelated Data)平滑 �k"�">�2#V |',M_
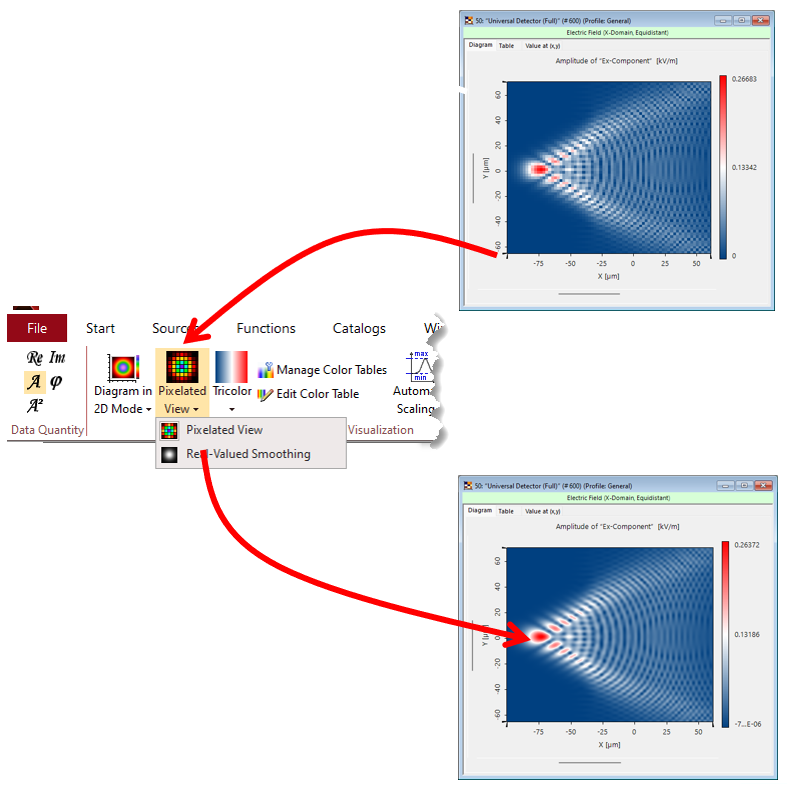
e]� • 探测器中的像素越少,探测器评估速度更快。 o]�Z
_@VI� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 \�U/�v;Ijf • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 ��O(�VxMO
案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 ��C��,o��:
O87"[c��`> *��8$>W�hr 数据阵列视图: 像素数据(Pixelated Data)平滑 �k"�">�2#V |',M_
e]� • 探测器中的像素越少,探测器评估速度更快。 o]�Z
_@VI� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 \�U/�v;Ijf • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 ��O(�VxMO
案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 ��C��,o��:
!��|:R�cH[
 ��Y!�SE;N&
��Y!�SE;N&
�gaQ�[�3g�
数据阵列视图: 像素数据(Pixelated Data)光滑化 :qx��m !�P
A9�
U5,mOz
'gC�J�[�ce
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 ]?[zx'��|�
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 :^��n*V6.4
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 E �W`W~h[
_B)s�=Snx�
 'e F�%����
'e F�%����
>t�N��5vWW
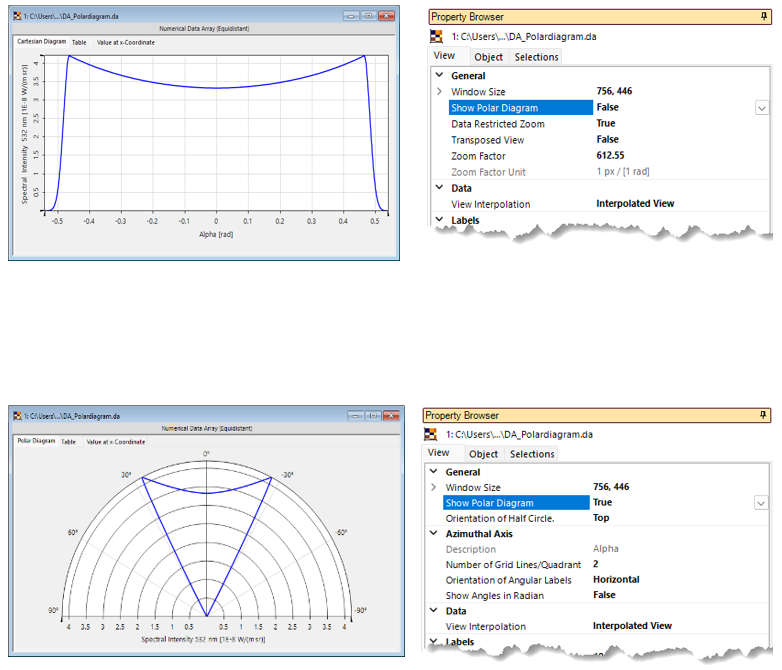
数据阵列视图: 极坐标图(Plolar Diagram) �0!pJ5q ,A
6��Lb�{r4^ • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 +j�Ugx;u,� • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 �u$C\E<G�^ • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 �c��S4��DN • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 ?=<��~^�Lk
P�>(&gl�r|
 t��AERbiH
t��AERbiH
<:�">m�V+/
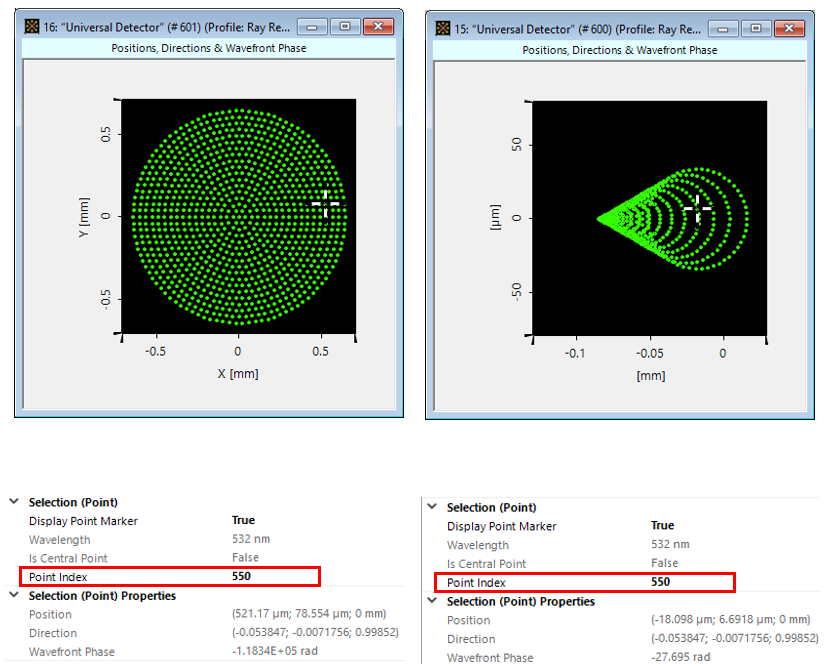
数据阵列视图:找寻以及点的标识 S<"oUdkz��
6hO-H&r+�+
z`4c 4h�]I
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 pr_>�b�`p6
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 �P;73Hr[E#
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 \8e2?(@"k
M �diw�Ri�
 R:M,tL�-l�
R:M,tL�-l�
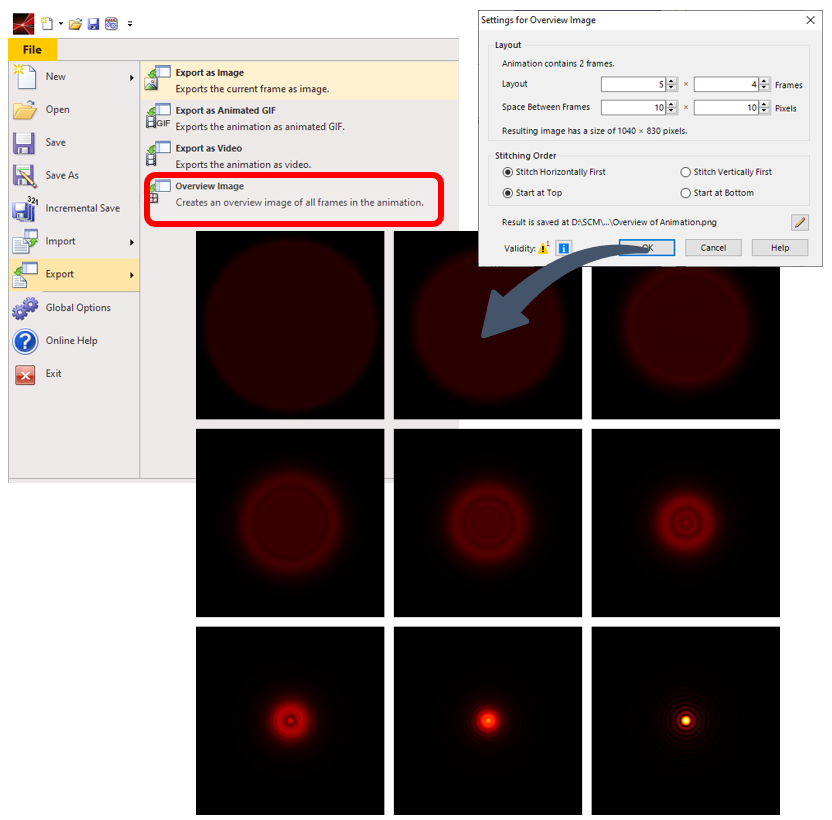
d�`m�D!�)j 导出图像的概览 0]B(����a� k2r�3dO@�q �le8 �#Z}p
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 $5N�KFJc��
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 0�OnV0�SIL
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 y!���~qbh[ d$G}iJ8$mp
 n���ls ���
n���ls ���
@��}&_Dv�f
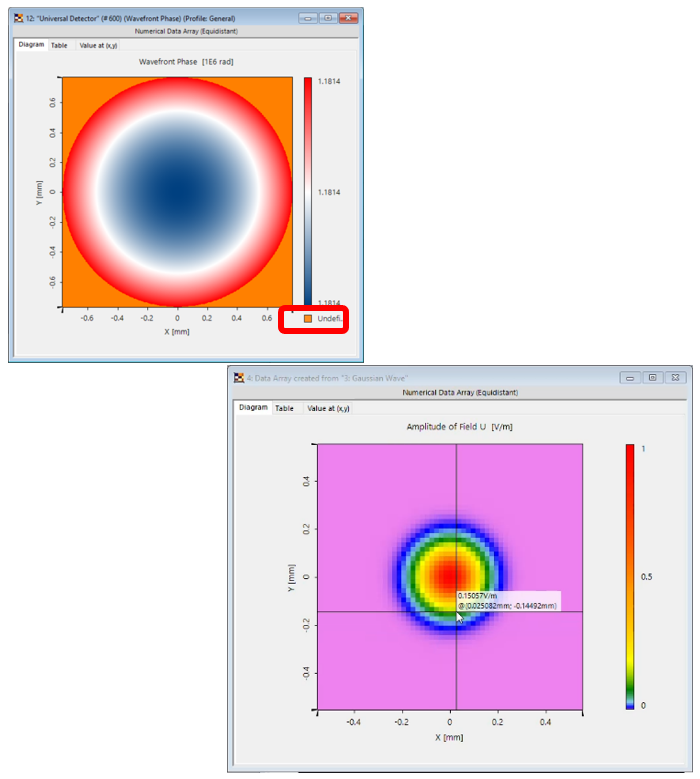
数据阵列视图: 更多的新功能 �'RbQj}@x�
�[�c~kF�+8
l$XPI�C�~H
• VFL2023.1可以对未定义区域填充不同的颜色。 g<w�RN#B�
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 �Dvc&R��G�
T^:�fn-S}=
 2��YlH}fnH
2��YlH}fnH
%%JMb=!�%2
Graphics Add-ons提供更多数据视图选择 4<gb36)|�4 =�5x&�8��i ��t�e,[��f
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 l�z�<]5�T|
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 -L��W�[7s$
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 )Xt���n�k Vsnu�y8~�k 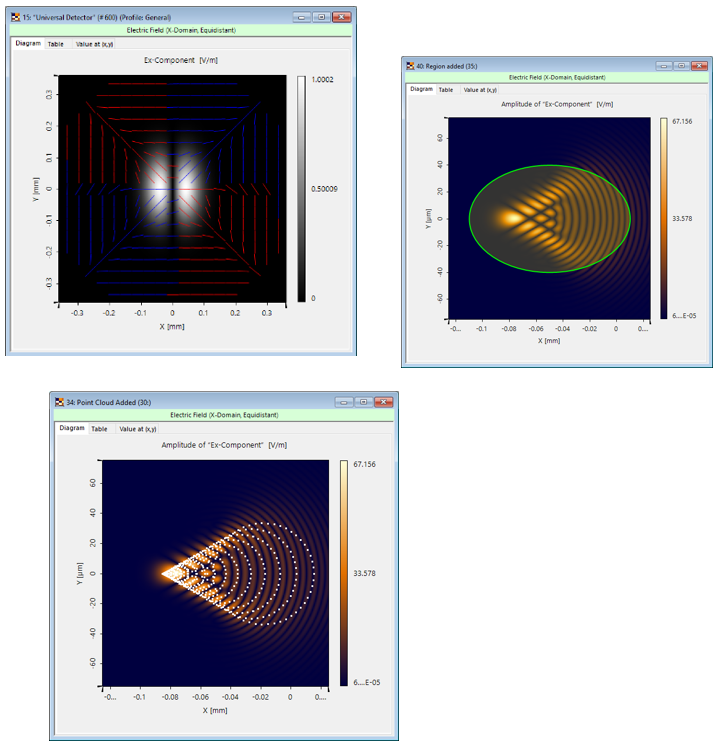 1�P�(&J��� T�~�4N+f�K �!?�!C'-ps Graphics Add-ons提供更多视图选择 3W_P�E+:Kr x@Hd^�xH�`
1�P�(&J��� T�~�4N+f�K �!?�!C'-ps Graphics Add-ons提供更多视图选择 3W_P�E+:Kr x@Hd^�xH�` • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
p-S�J6Gg
9 • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
�q�IMA6u�/ • 图像组件提供了多样化的配置选项。
��3?�n>�yS [*:6oo9�8' 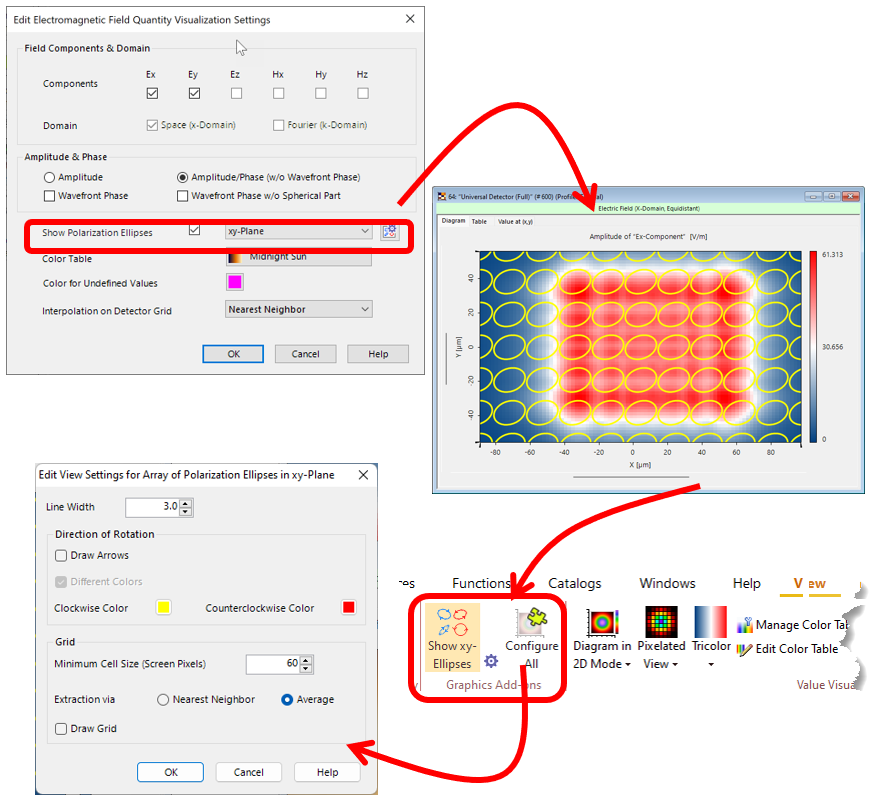 /��X'(3'a 5L,}�e�<S$ ^��vi�lgg~ Graphics Add-ons: 增加了 Point cloud 功能 wV\g�j~U;P �)lk&z8;.= qM�t+�+*Ls
/��X'(3'a 5L,}�e�<S$ ^��vi�lgg~ Graphics Add-ons: 增加了 Point cloud 功能 wV\g�j~U;P �)lk&z8;.= qM�t+�+*Ls • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
F�#
T 07< 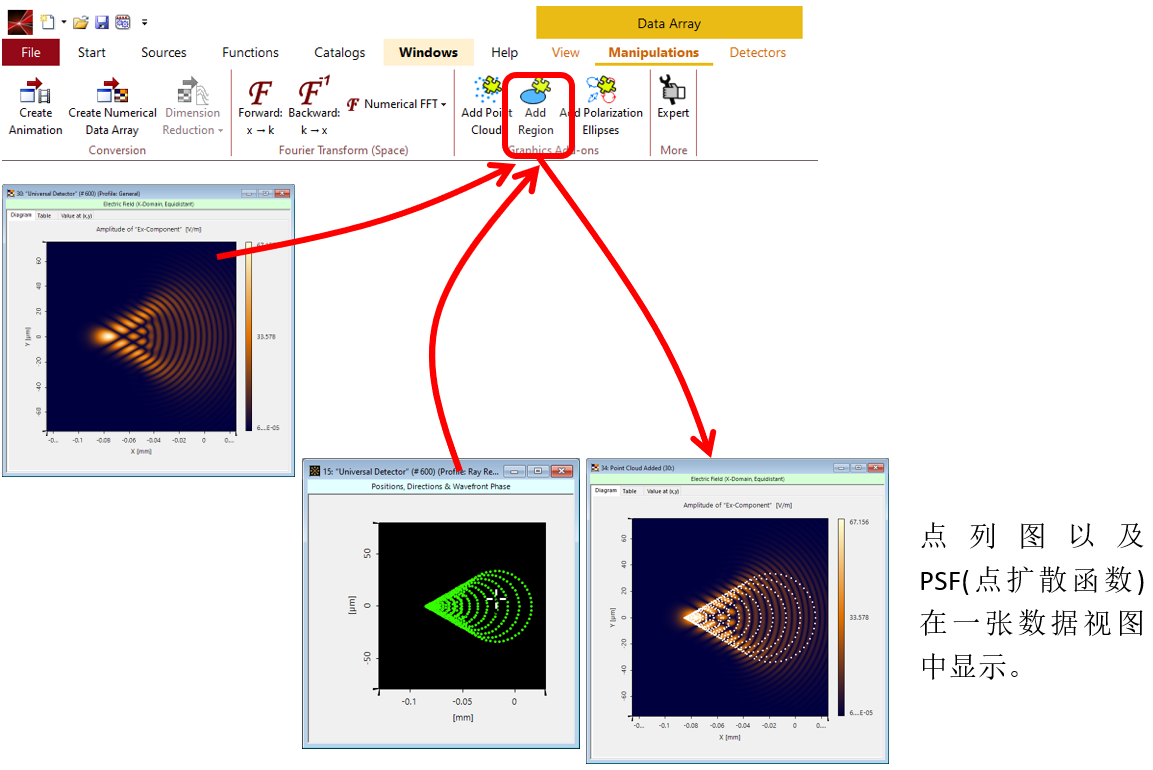 ���,��Uh�b _�W�X��tB# VirtualLab中的区域 (Regions) G�)v
�#�+4 r$��Co0!�. s,�������k
���,��Uh�b _�W�X��tB# VirtualLab中的区域 (Regions) G�)v
�#�+4 r$��Co0!�. s,�������k • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
^�V$�Aj�t 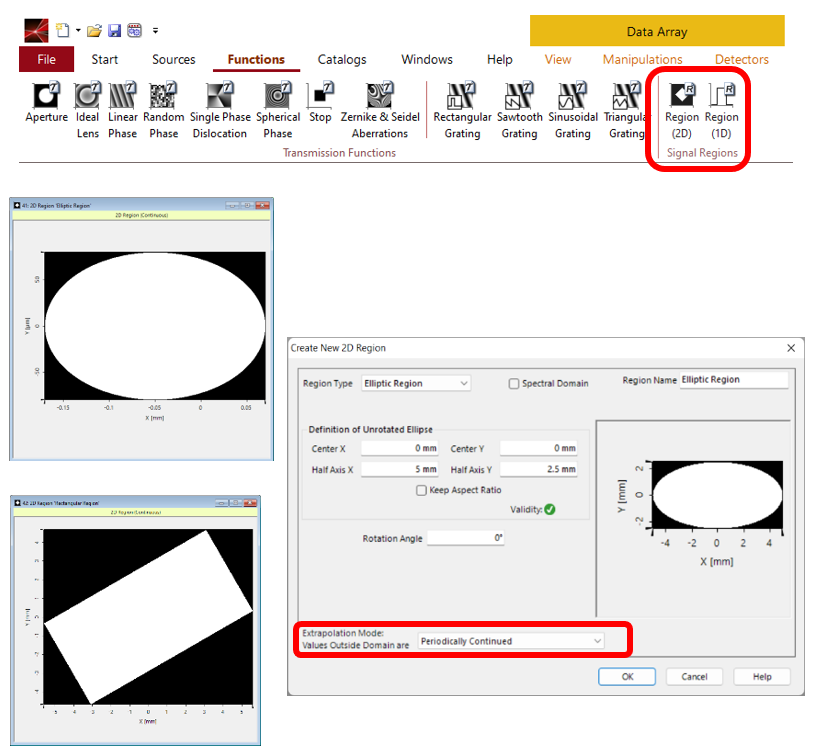 �t58e�(dgi B(�xN�� Gs �
<1%f@}+8 Graphics Add-ons: 添加区域(Add Region) _4^R9�Bt�� (jU6��GJRP ��-4�6C!6a
�t58e�(dgi B(�xN�� Gs �
<1%f@}+8 Graphics Add-ons: 添加区域(Add Region) _4^R9�Bt�� (jU6��GJRP ��-4�6C!6a • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
{ZY+L;e�g1 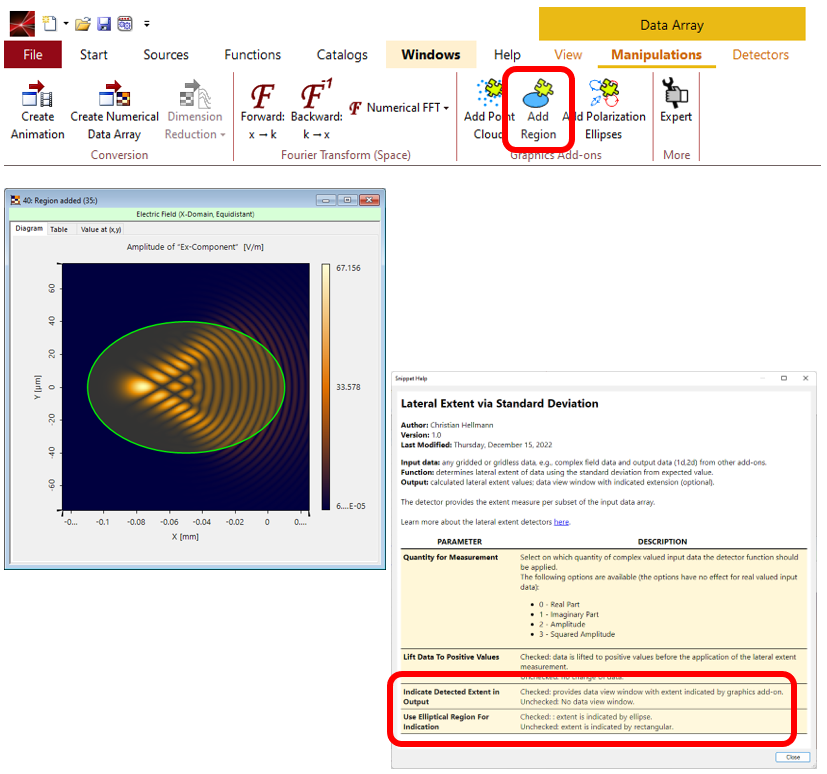 2^�8%�>��,
�Uf}�\p~;
2^�8%�>��,
�Uf}�\p~; 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
V3 �~��~�� UG=K|OXWJ Graphics Add-ons: 添加区域(Add Region) �����Yn�8= V5*OA??k< Y>'|�oygHA • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
/0Ax�*919j f�bU�r`~Y" 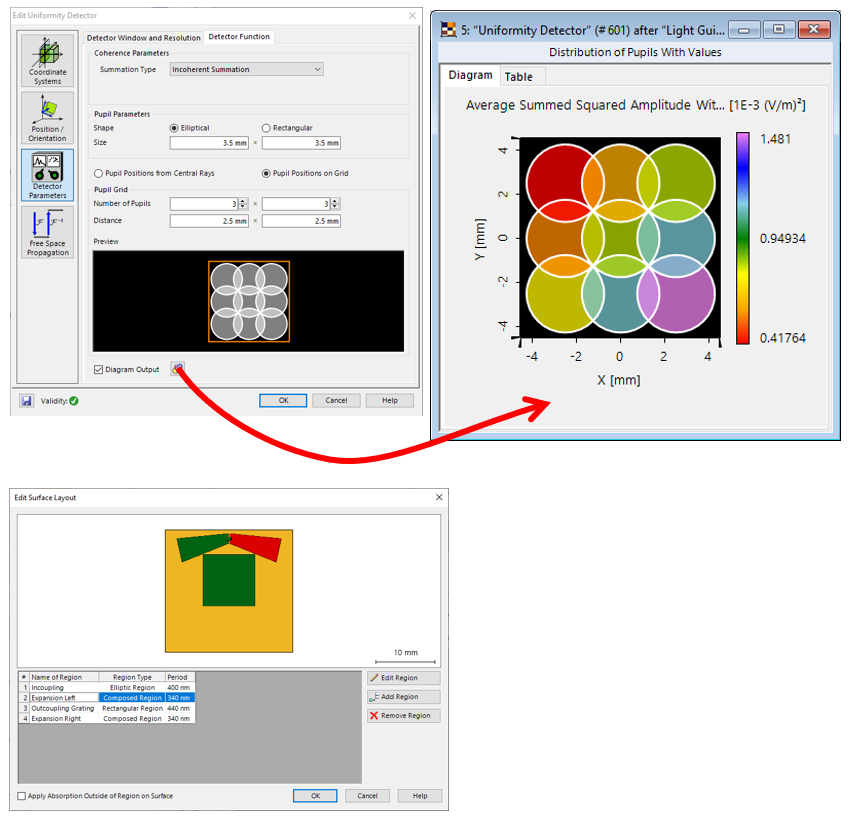 )7h$G-fe��
)7h$G-fe�� • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 %2v�4<icvq O�{����#=d ��_3ZYtmn. • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
,G)r=$�XU� • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
�KZ/=IP��= 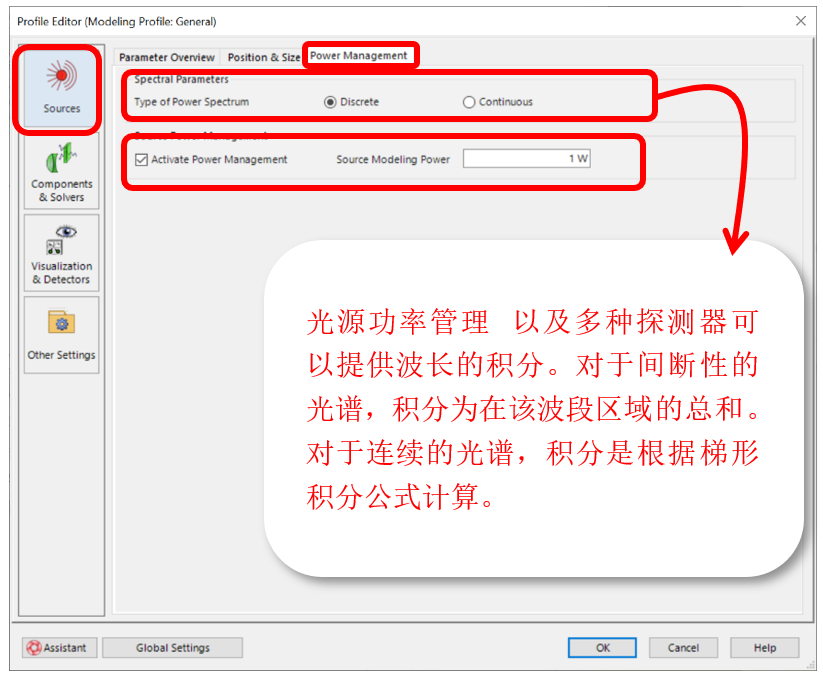 kh`"�WN Nt
kh`"�WN Nt • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
K5lmVF\�$P 1. 针对给定光源参数,进行光源功率的评估。
E~6c��-Lw 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
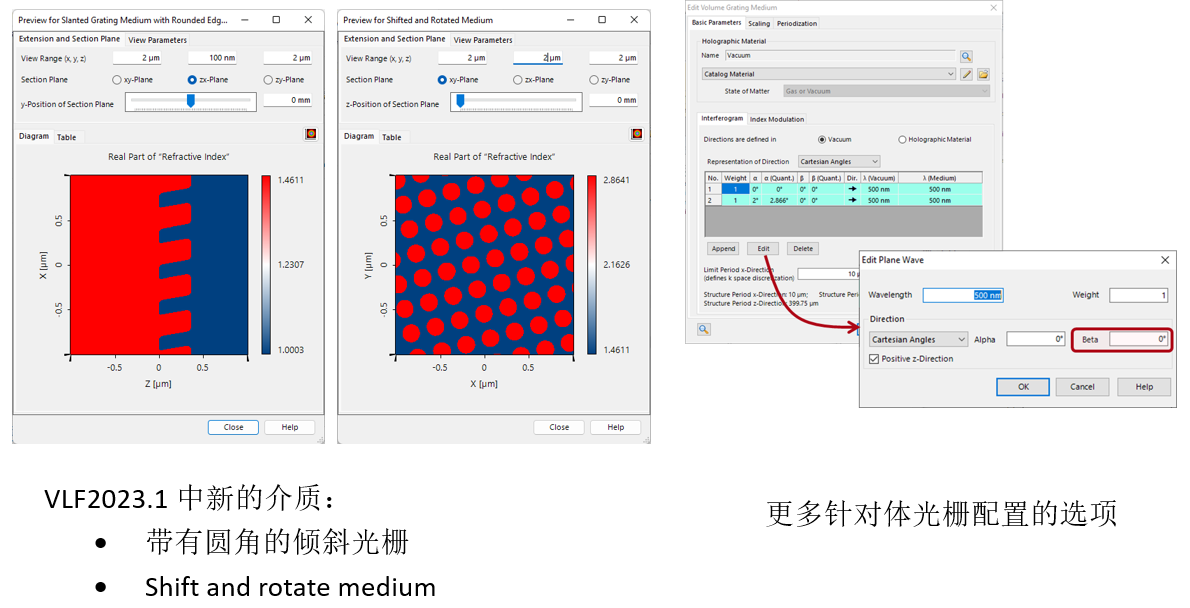
�b9!FC$^�J DY`�kx2�e! 组件 9g<����7i 组件(Component)新的特征 OL�E[UXD-E &G-!q�x�e� 9E6_]8rl�� • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
�-P�fX0y9n 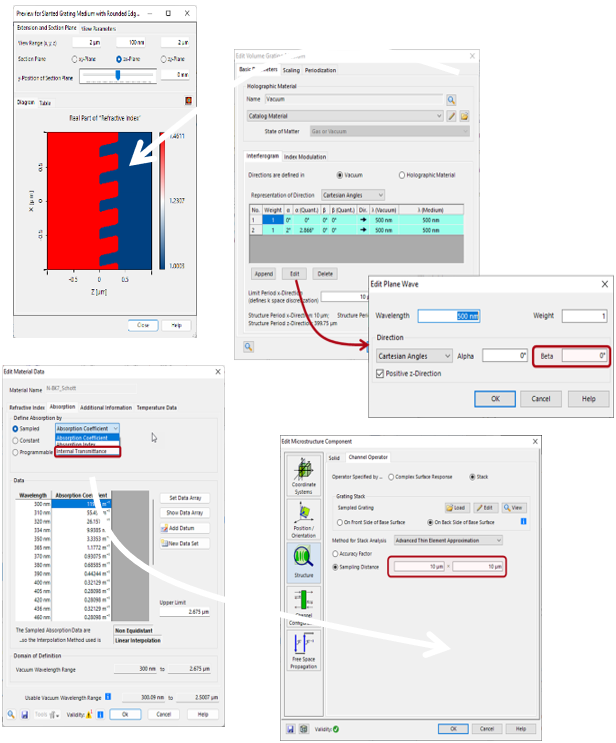 K5��7&y�VX Fx�2bwut.K 组件(Component)新的特征 1]p ZrBh"E
K5��7&y�VX Fx�2bwut.K 组件(Component)新的特征 1]p ZrBh"E
lz�?$f4TzA
 �xsD�(�$�_
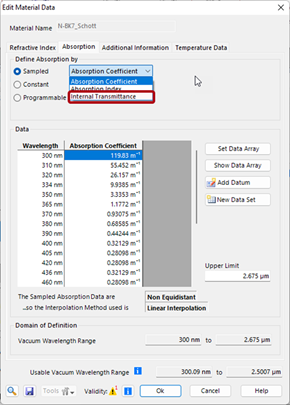
�xsD�(�$�_ 吸收特性可以用采样数据定义吸收率以及透过率。
y]f"@9G��# ):[�7E(�F= 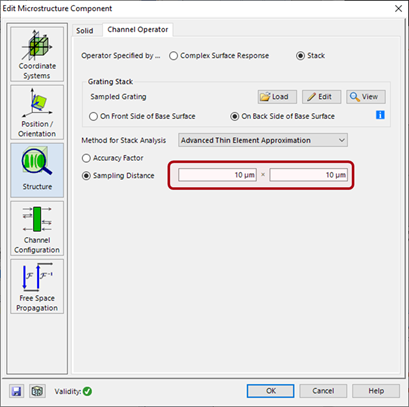 =Lf,?"�S�� y#3j`. $3p
=Lf,?"�S�� y#3j`. $3p 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
��6�V7B;tB 3v1iy��/ / 组件(Component)新的特征 �,)�v��DeU
zN^n]�N_?
 &B6E�p6QS� )p<Ex�MIxd 组件(Component)新的特征 xLK<�W"%�0
&B6E�p6QS� )p<Ex�MIxd 组件(Component)新的特征 xLK<�W"%�0
R}�*_~7r�5
 �^�\4h<�M� ����YQ�j�2 组件(Component)新的特征 \1D�<!k\S�
�^�\4h<�M� ����YQ�j�2 组件(Component)新的特征 \1D�<!k\S�
b4[bL2J$h1
 1H6�<[iHW g/CSG�II�T \hDl�T�p�}
1H6�<[iHW g/CSG�II�T \hDl�T�p�} 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
fF7bBE)L/| 处理日志 �A�%KDiIA� f4� P8Oz� 扩充版的处理日志 J}v}~Cv��� 3@dL�/x4A ZX9��T�YN • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
PgtJ3oq�[} 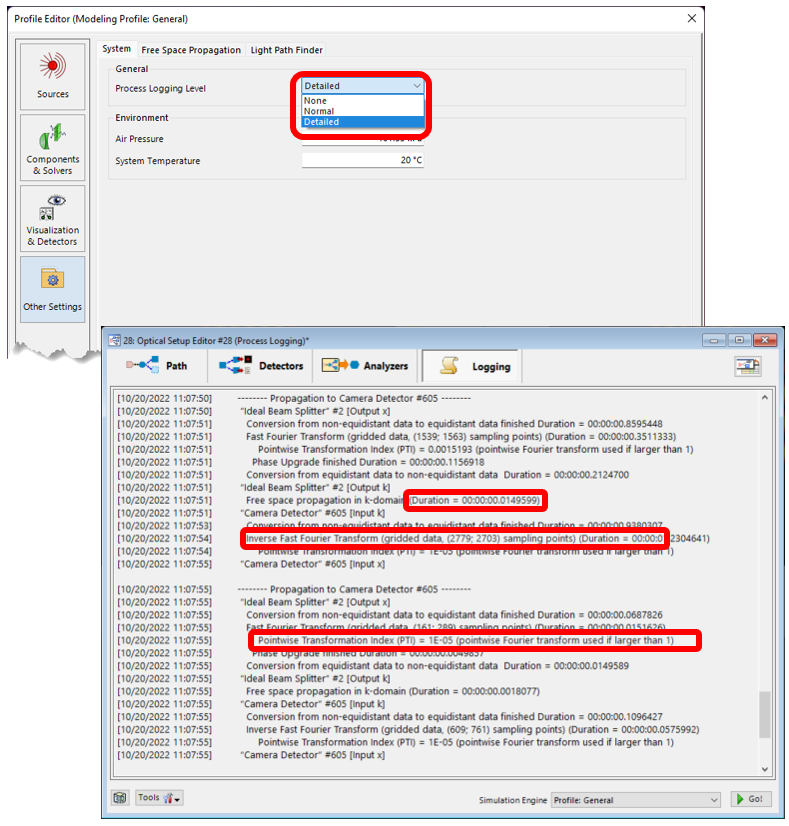 �[���q?<Qe
e2s]{o�bf 系统仿真分析 [�>8}J�"�� {< )1q� ;
�[���q?<Qe
e2s]{o�bf 系统仿真分析 [�>8}J�"�� {< )1q� ; • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
P�g,b-W?n* 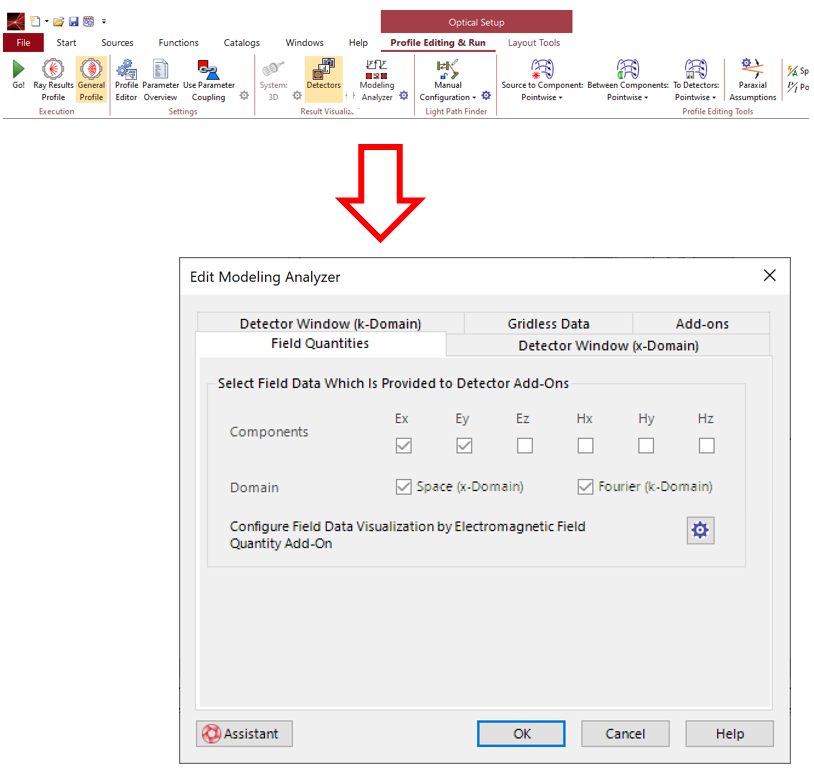 �\^L�`7cBL �*|�%@6I�( 专家模式(Expert Modus) �WA)yfo0A uki#/�GzaO 专家模式中的数据阵列’Manipulations’ �g!@<n1 L� D��S+}��UO K�tb\ �b�w
�\^L�`7cBL �*|�%@6I�( 专家模式(Expert Modus) �WA)yfo0A uki#/�GzaO 专家模式中的数据阵列’Manipulations’ �g!@<n1 L� D��S+}��UO K�tb\ �b�w • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
JD)(oK�%C 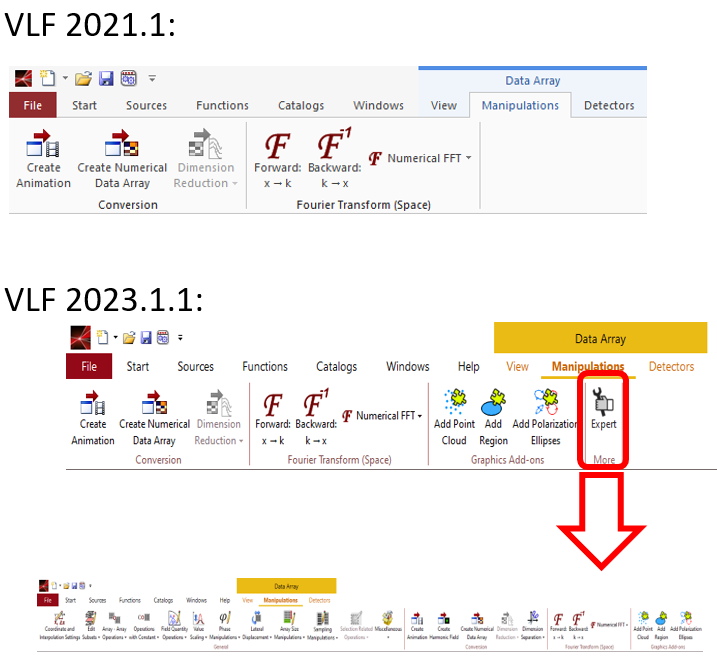 K1m�Pr^3rC �|=Eo?�Q_ 微小的改进帮助:新的计算器 2�7
]':A4_ |�'�P�]GK� +�giyX7BPJ
K1m�Pr^3rC �|=Eo?�Q_ 微小的改进帮助:新的计算器 2�7
]':A4_ |�'�P�]GK� +�giyX7BPJ • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
�:o�0JY= 5 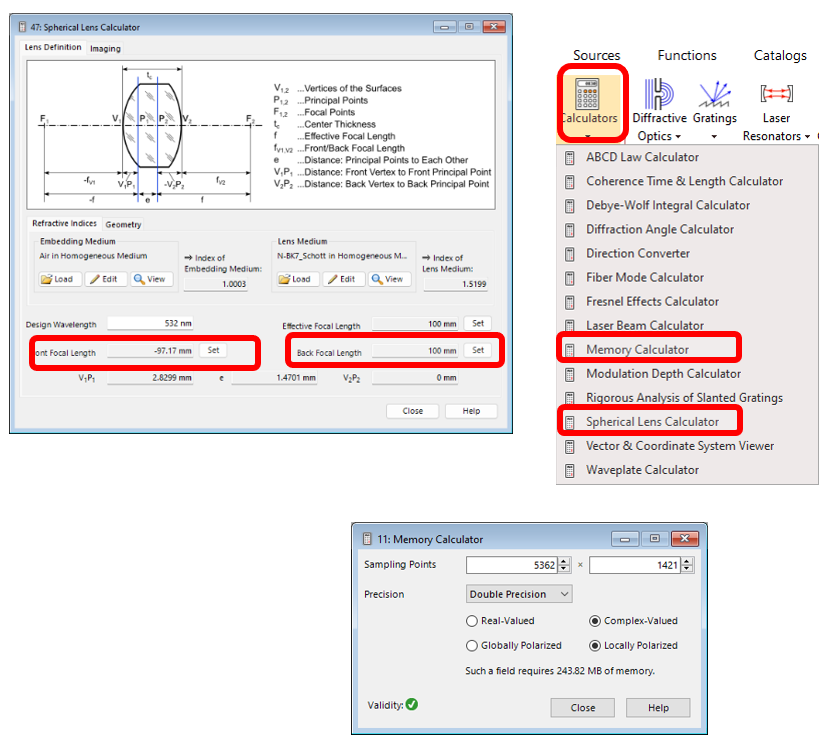 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



