2022 年 12 月,发布 VirtualLab Fusion 2023.1 '( I0VJJ � VirtualLab Fusion 2023新版本更新内容(三) # �fqrZ9:@ 2023.1版本新特性一览 ~!ooIwNN�z ��YE�@y�ts 基本信息 \k�5"&]I�3
+a39 !j
1_
 * WV=X���p
* WV=X���p  �J�4�ZH�E\
�J�4�ZH�E\ VirtualLab Fusion 2023.1新版本
主要更新方向 �X$K�T�sG*
 a���4UwhbH
a���4UwhbH
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 �q\@_L.tc[
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: &|Wqzdo?�#
- 更快的速度 �%}��(`��?
- 更容易使用 �$y6 <2w%b
- 融合更多物理光学模型 A|�LO�!P,w
- 更高的透明度 n
�UmyP�Q~
- 多元的仿真控制选择 I?�I�z5e�-
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 -��E1-(TS�
�,K[e?(RP�
�p-I�J':W�
功能概述(以下为更新内容的详细解释和案例展示): ���dwk%�!%
数据视图 I;�Mm��+5A
�|&"aZ!�Kn VLF 2023.1数据视图 \d�CGu~bT� ��vyD�xX 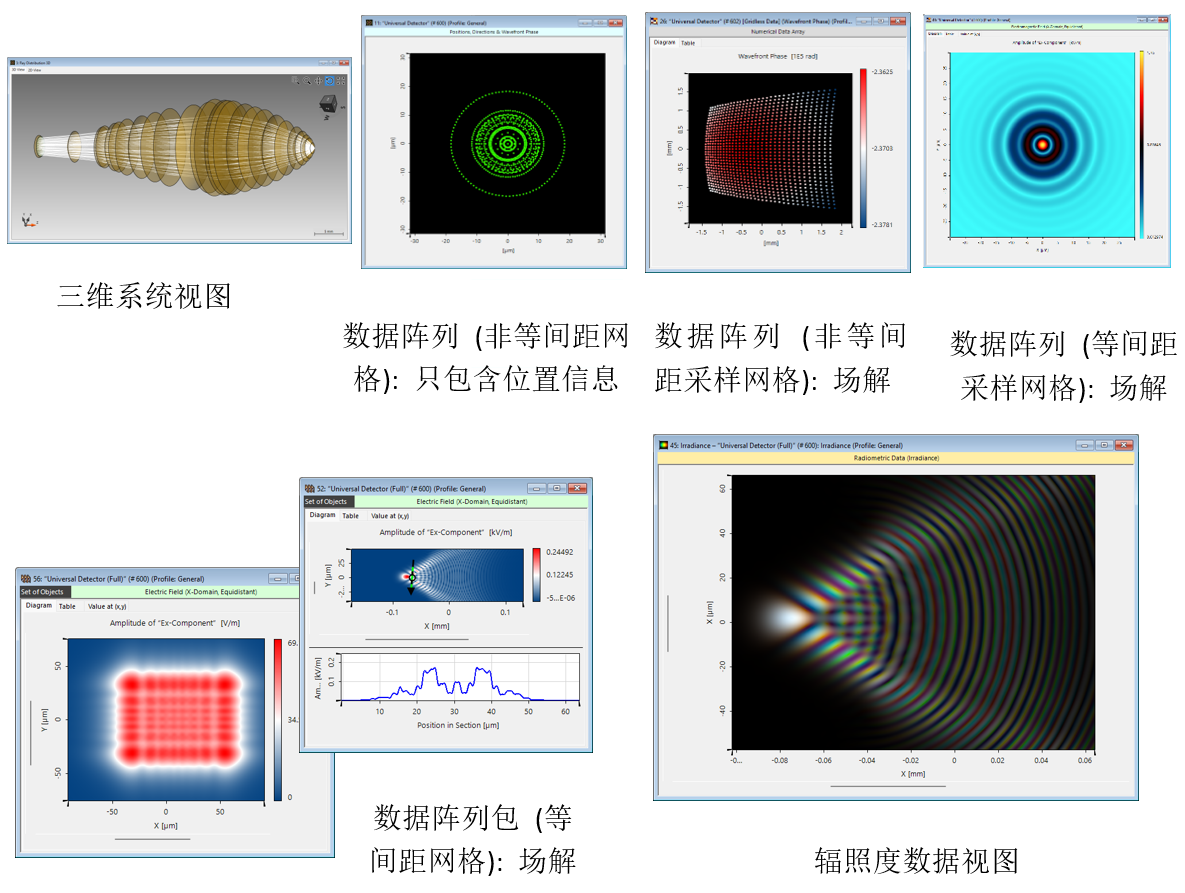 k�e��C'/\e pl%!AY'oE> VirtualLab Fusion 2023.1数据查看方式 �<Q(E {c3"
k�e��C'/\e pl%!AY'oE> VirtualLab Fusion 2023.1数据查看方式 �<Q(E {c3"
0)SRL�HTY%
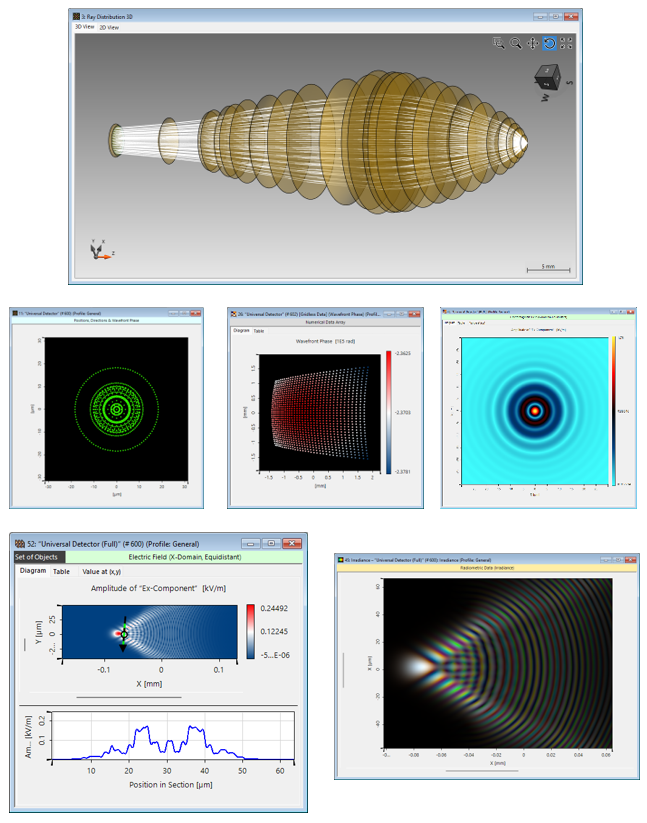 �Ho�&:Zs�� 6�!>p<p"Ns 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 r���O>'QZ% 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 5�IUd�A��? 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 �7���SS#V� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 6YU,>�KP� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 nQ�Q�Hm6N�
�Ho�&:Zs�� 6�!>p<p"Ns 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 r���O>'QZ% 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 5�IUd�A��? 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 �7���SS#V� 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 6YU,>�KP� 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 nQ�Q�Hm6N�
+rU{-`dy9'
vY�m-$KQ"o
三维系统视图: 新的对话框以及设置选项 ��y>}r���
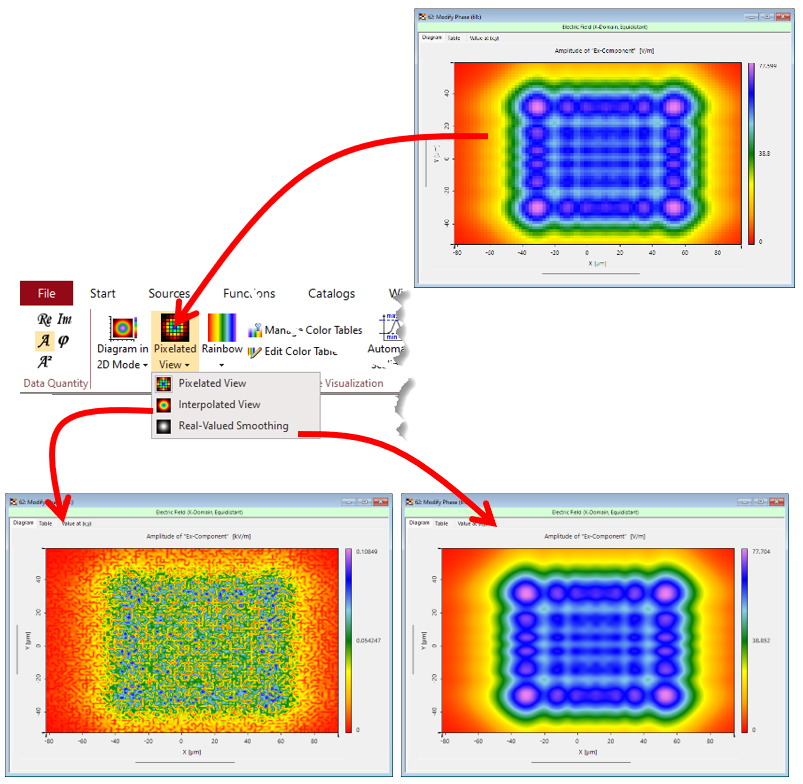
�.^*;hZ~4% 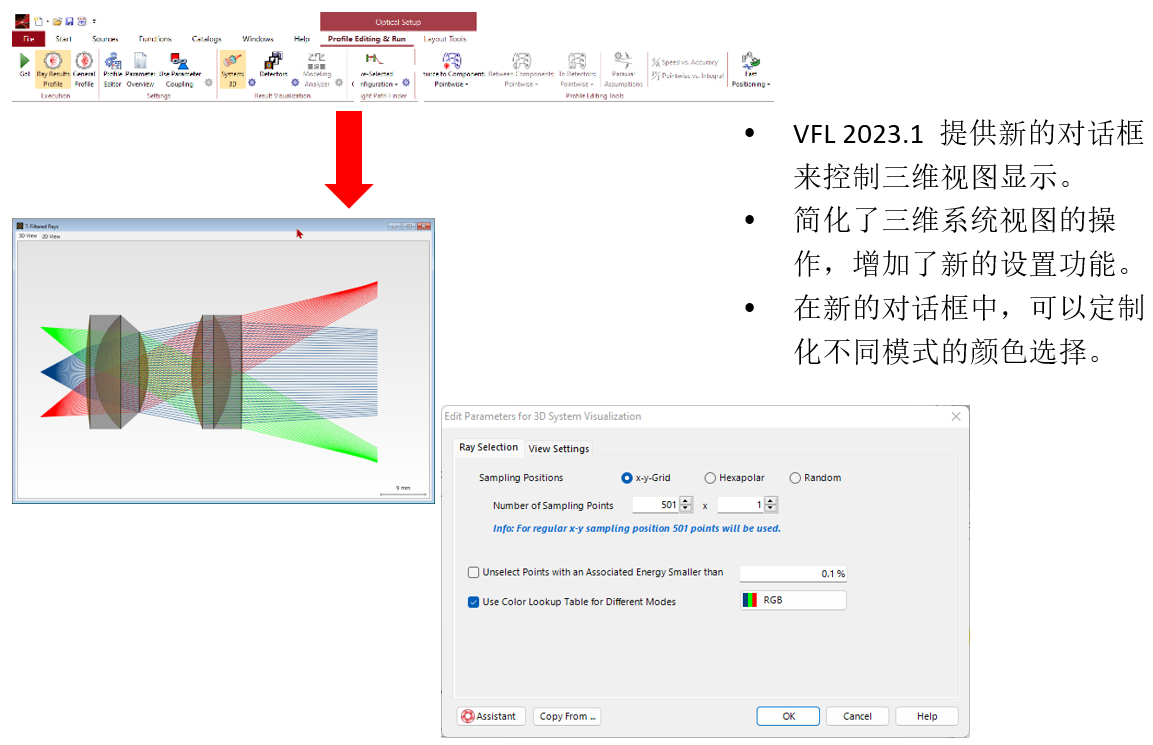 ^+Nd\t���p �9vP;i= fr 数据阵列视图: 像素数据(Pixelated Data)平滑 v4h�rS\M�� �r'Wf4p^Xd • 探测器中的像素越少,探测器评估速度更快。 ��;&<N1�� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 ( 0/M?YQ�F • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 Pw<'�rN8'' 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �x�?o#}:S�
^+Nd\t���p �9vP;i= fr 数据阵列视图: 像素数据(Pixelated Data)平滑 v4h�rS\M�� �r'Wf4p^Xd • 探测器中的像素越少,探测器评估速度更快。 ��;&<N1�� • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 ( 0/M?YQ�F • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 Pw<'�rN8'' 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �x�?o#}:S�
iO�?���AY
 �<qfA�W?tF
�<qfA�W?tF
2�7�N�;> �
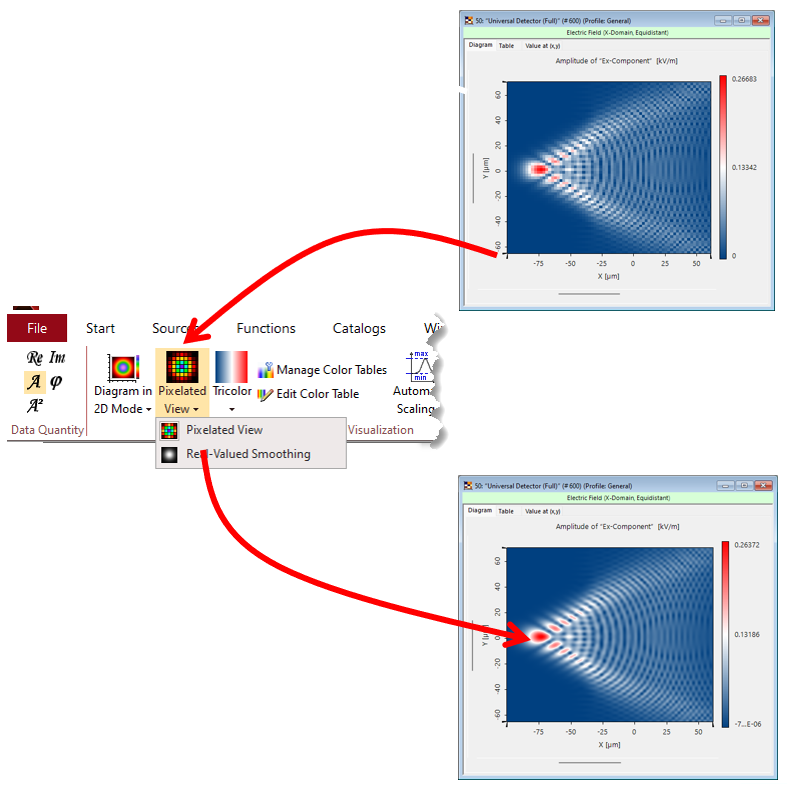
数据阵列视图: 像素数据(Pixelated Data)光滑化 ]f�z��XrN_
�"�<+~uz
�s8&�q8r7%
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 N#R�b8&G)b
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 �!b_(|~7Lc
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 !*Is�0`��`
��Bk\Y� v0
 �|P]W#~�Y-
�|P]W#~�Y-
�C<��C$df
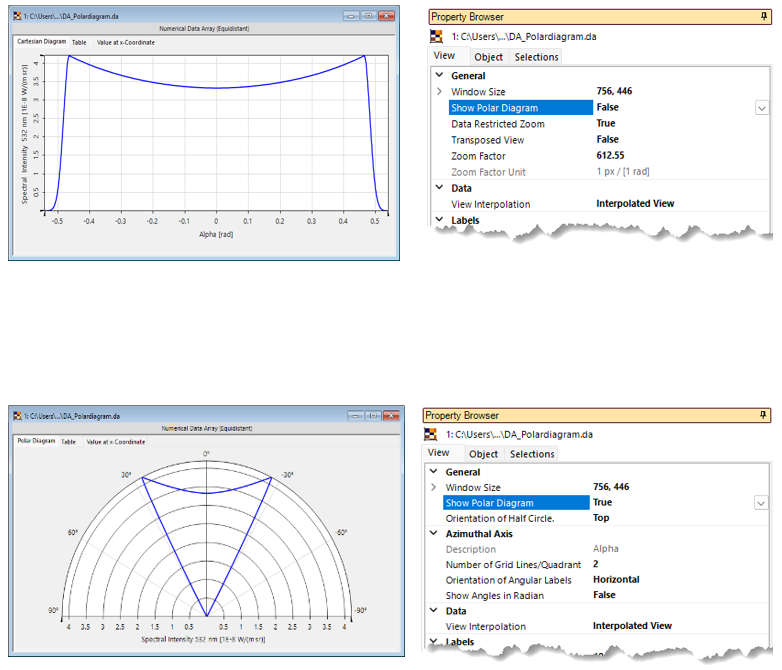
数据阵列视图: 极坐标图(Plolar Diagram) F}{�%�*EJ
=s":Mx,o
• 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 ya1
�aWs�~ • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 hh�aiH�i!$ • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 i<F7/p "�- • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 s1Acl\l-uF
Fn�.J�t�Iu
 ��O
Ol�:��
��O
Ol�:��
h_?`E�S�I~
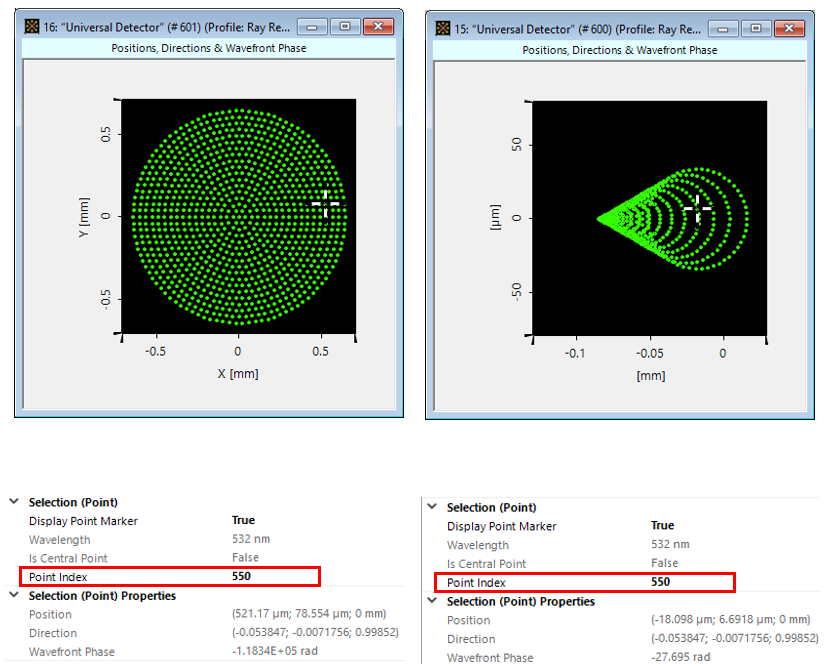
数据阵列视图:找寻以及点的标识 ;�ZUj2�WxE
s>�o#Ob@4'
S�bGdcC��B
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 �T�='uqKW\
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 y@l&�B+2ks
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 ��0Q���a�0
H2BRI��d��
 hUi@T}aA|
hUi@T}aA|
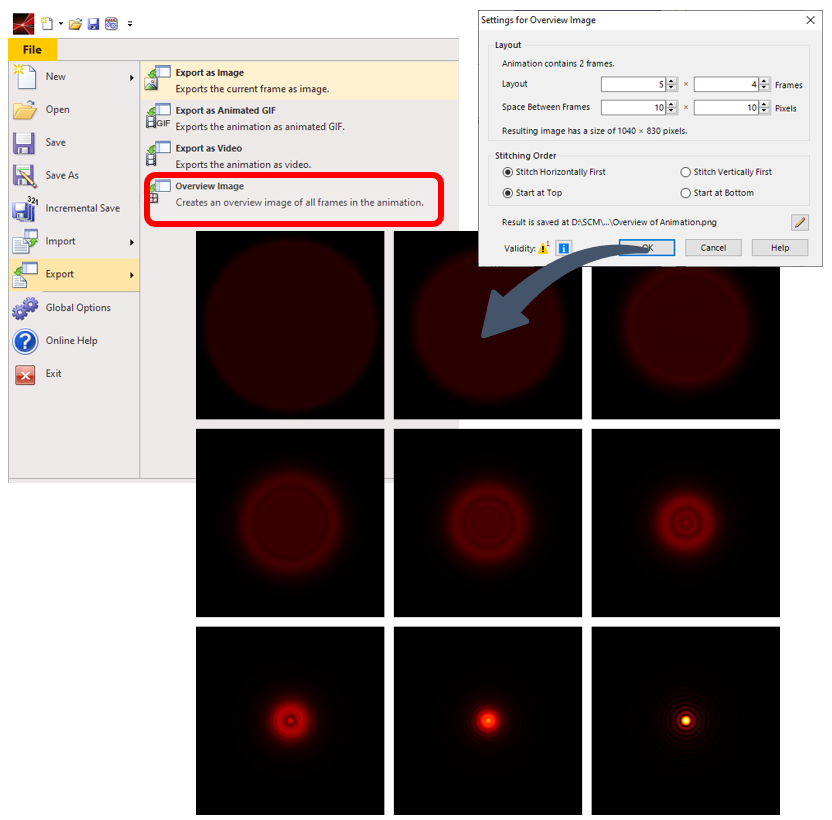
#�?w07�/~L 导出图像的概览 [TO�o���9W NH|�I�>vyN g8�uqW1E�^
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 �x3&gB`j-
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 3!l>\�#q6
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 �xx!8cvD4? 'wEQvC��S
 ��:W,��S�
��:W,��S�
��6}-�N�o�
数据阵列视图: 更多的新功能 =x�m7i#1��
~g�/"p`2-N
QO}~�"lM�j
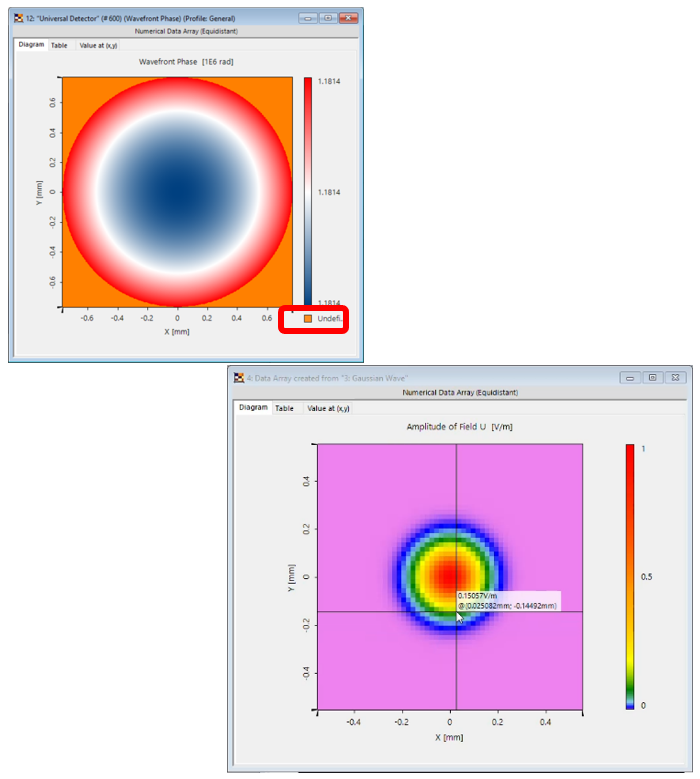
• VFL2023.1可以对未定义区域填充不同的颜色。 ldUZ�\z(*�
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 �M��u>����
E#�+�2�)�Q
 =KHb0d |.�
=KHb0d |.�
Cd)g�8��<
Graphics Add-ons提供更多数据视图选择 :�W�0p3�6" �**%�&|9He �.4\I�?��
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 }R<�t=)�:�
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 Q&:)D7m\)S
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 :@i+y�N cV �i��S�O xQ 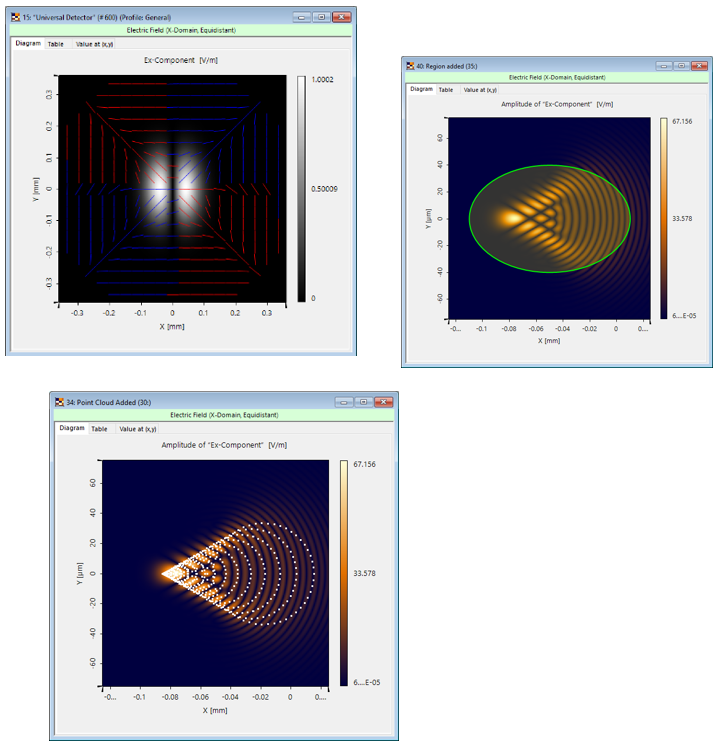 w\G����J,e )iw�-l�~y; ?@�4M�t2Z\ Graphics Add-ons提供更多视图选择 :�Q D�ka�A L�"
�ej�A�
w\G����J,e )iw�-l�~y; ?@�4M�t2Z\ Graphics Add-ons提供更多视图选择 :�Q D�ka�A L�"
�ej�A� • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
$�B-�/�>Rz • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
se %#U4�0* • 图像组件提供了多样化的配置选项。
)&_bY~��P� {�.$7g8�]I 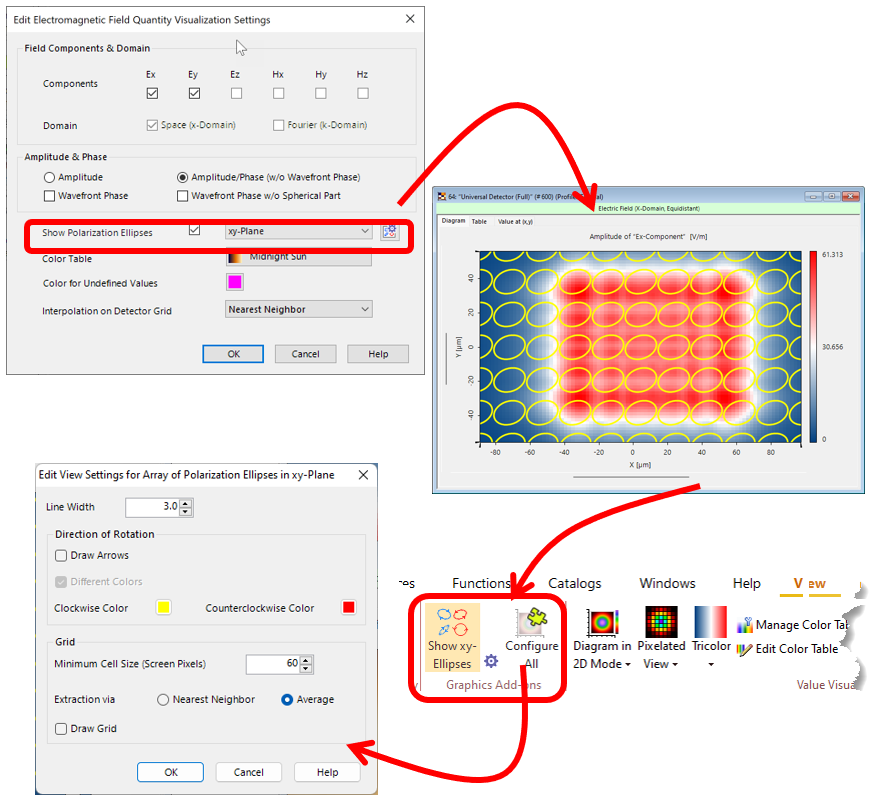 UDr�1t �n� �9�JP:wE~y �0a8��9<yX Graphics Add-ons: 增加了 Point cloud 功能 pRV�.�\*:c I>FL��&E@K ��_C5i\Y�)
UDr�1t �n� �9�JP:wE~y �0a8��9<yX Graphics Add-ons: 增加了 Point cloud 功能 pRV�.�\*:c I>FL��&E@K ��_C5i\Y�) • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
>hNS�EWMY` 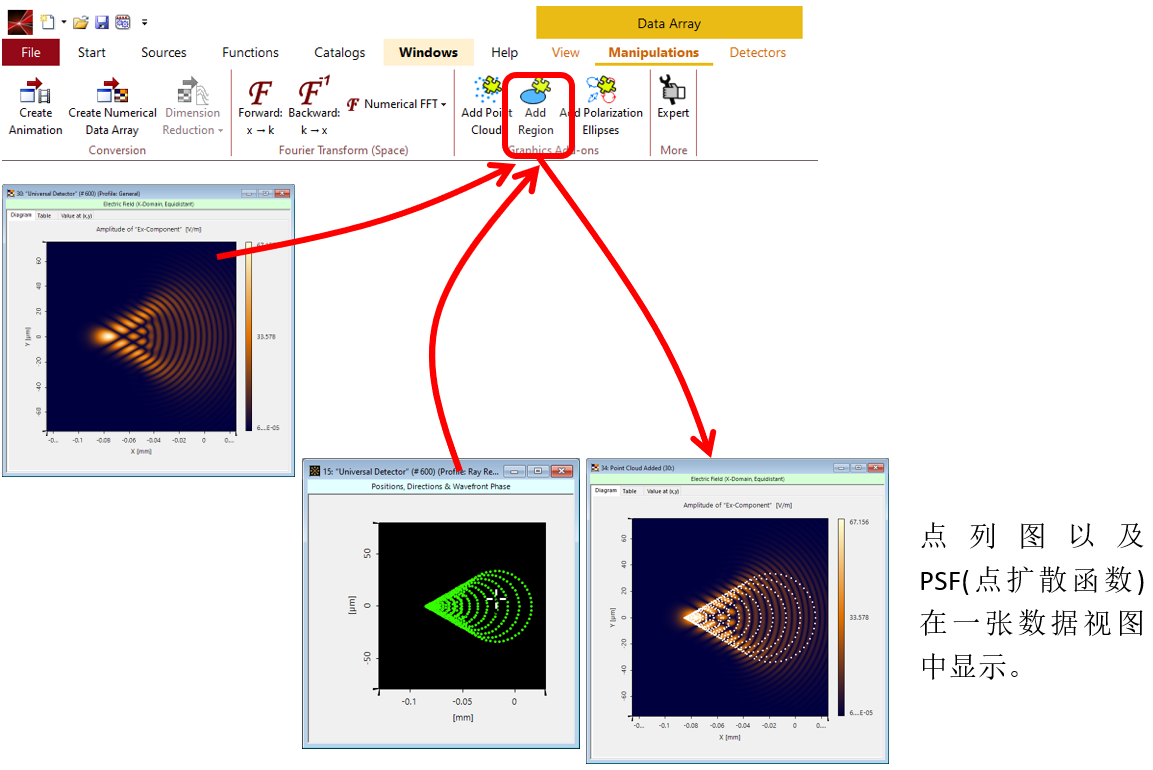 ~��|V�q�v{ <&��b�,%O� VirtualLab中的区域 (Regions) �<@(\z�
� 2*�V%S/cck s`=| D'G(=
~��|V�q�v{ <&��b�,%O� VirtualLab中的区域 (Regions) �<@(\z�
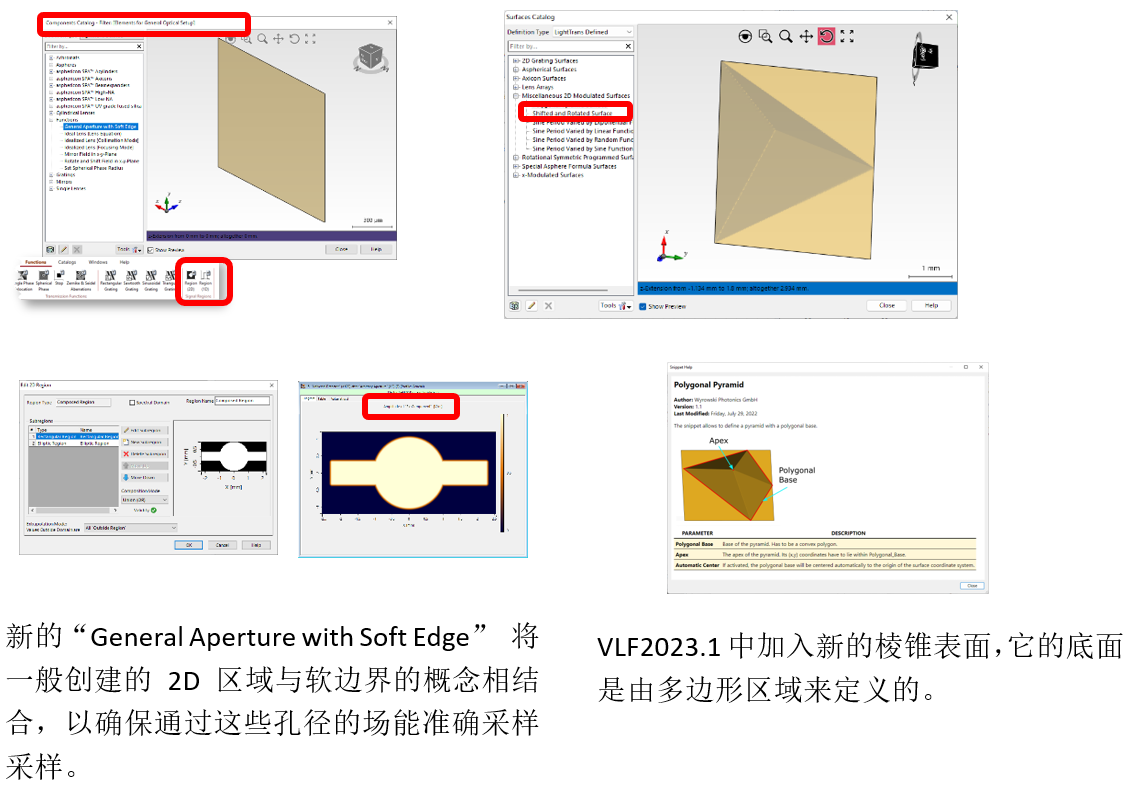
� 2*�V%S/cck s`=| D'G(= • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
"�L]v:lg3� 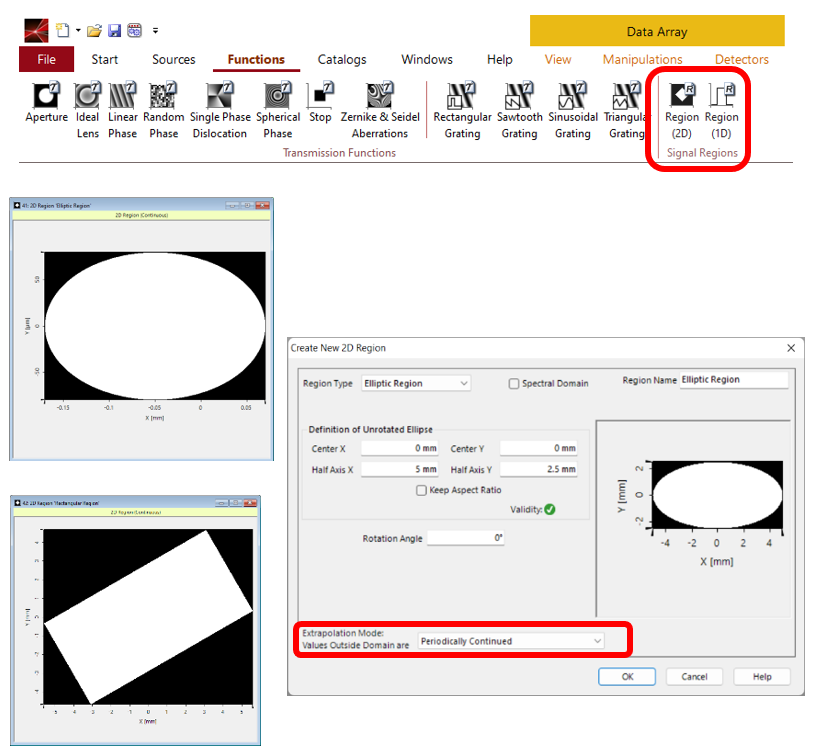 K>+ v" �x� w�3�,�K�qF �P_3�IFHe Graphics Add-ons: 添加区域(Add Region) $/"Ymm#"\Y n~6$CQ5dF( DGGySO6=$e
K>+ v" �x� w�3�,�K�qF �P_3�IFHe Graphics Add-ons: 添加区域(Add Region) $/"Ymm#"\Y n~6$CQ5dF( DGGySO6=$e • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
���2x<BU�3 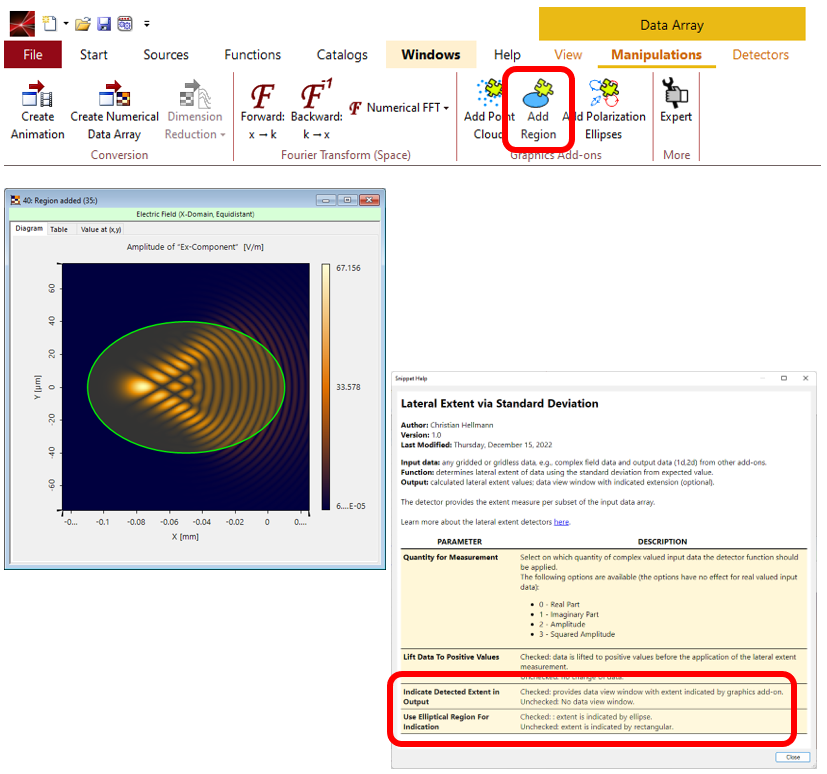 XA#qBxp/�h �Wd7*7'�]�
XA#qBxp/�h �Wd7*7'�]� 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
L;o�pQ~��g LmJjO:W}^y Graphics Add-ons: 添加区域(Add Region) 4ct-K)Ris� .\oW@2,RA9 <�~u�zHg%Y • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
u� W,�J5�! ?�<�t��?G 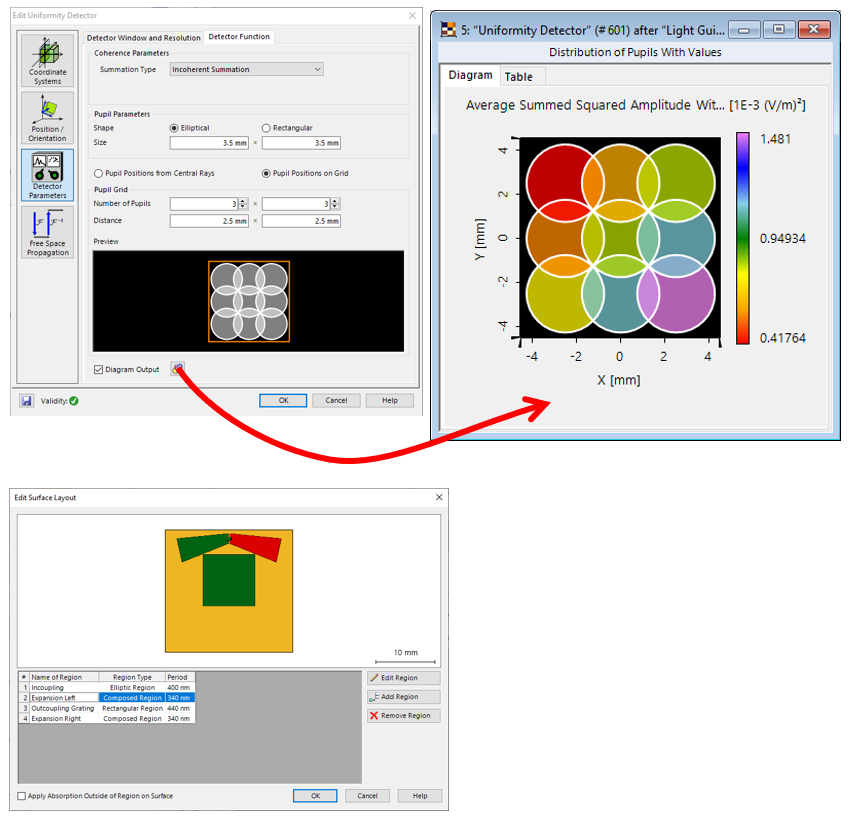 pP.`+�vPi�
pP.`+�vPi� • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 �]�~�]TZb� �mh"PA��p� ;g?PK5rB�( • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
.�)�tQ&�2
• 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
�Jf2JGT�cm 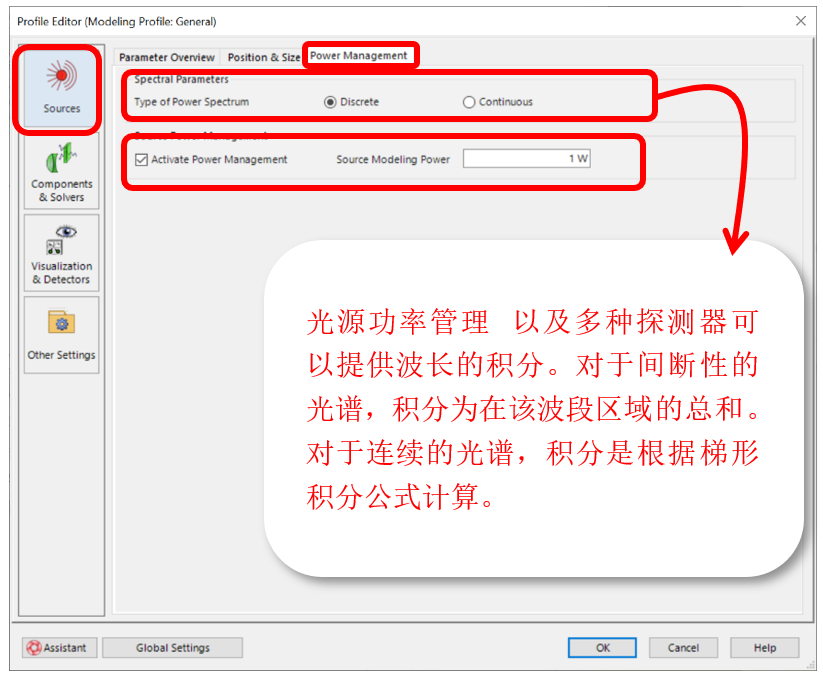 �3\Xk�)a_�
�3\Xk�)a_� • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
(.N n|lY<i 1. 针对给定光源参数,进行光源功率的评估。
,Dv*<La`�\ 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
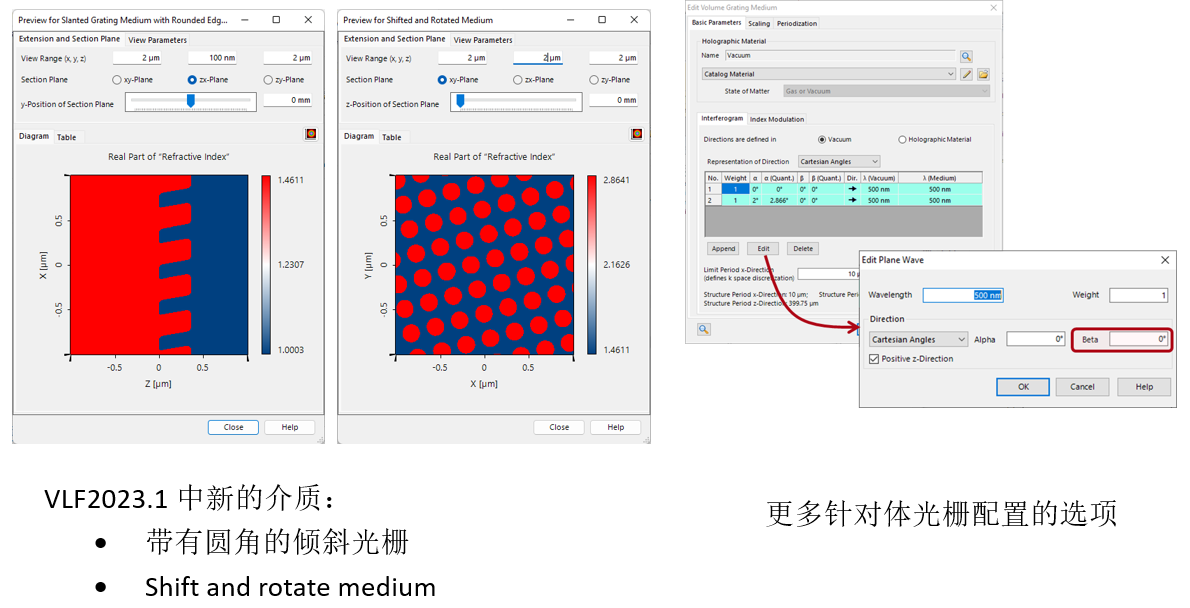
�7fypUQ�:y �9<rs3 �84 组件 �v+x<X��5u 组件(Component)新的特征 ]�Y�]]�X[@ ���t �}4� Wy-_�}wqHg • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
4�Mg%�}/cC 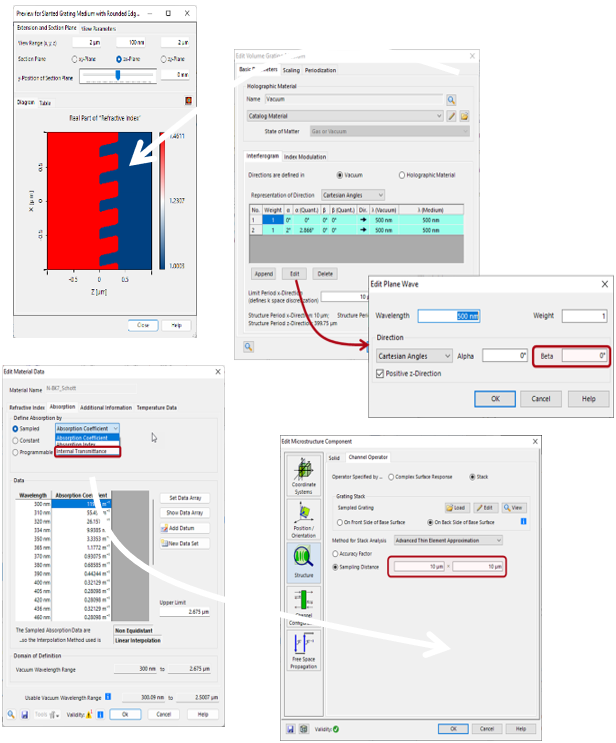 Y�`2��2DFO eMd��P4<�u 组件(Component)新的特征 $&.(7F��^D
Y�`2��2DFO eMd��P4<�u 组件(Component)新的特征 $&.(7F��^D
[O\��)R[�J
 ��!4c�Cq�_
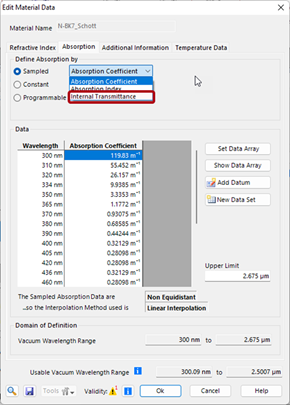
��!4c�Cq�_ 吸收特性可以用采样数据定义吸收率以及透过率。
@:w�^j�0+h olQ�P>s�a� 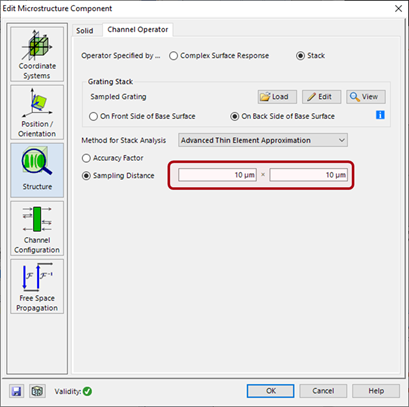 C�1�f$^��N |�s/�Kb�]t
C�1�f$^��N |�s/�Kb�]t 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
"
l|`LjP5M ��r��[ ��k 组件(Component)新的特征 jjH2!�R]^>
fP�TLP�cPP
 wclj9�&�k� 2|?U%YrHWs 组件(Component)新的特征 N}/V2�K�]Q
wclj9�&�k� 2|?U%YrHWs 组件(Component)新的特征 N}/V2�K�]Q
���Y!]a*==
 p}==a�NZK� L� %ac�sb} 组件(Component)新的特征 91R7Rr�ne
p}==a�NZK� L� %ac�sb} 组件(Component)新的特征 91R7Rr�ne
,�� SUx!o�
 3>3t(�M��| 3��8-kl,Vw &&$*��MHJ�
3>3t(�M��| 3��8-kl,Vw &&$*��MHJ� 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
nT:<_�'!�� 处理日志 9+*{3� ��t p/0�dtnXa( 扩充版的处理日志 |a��]���)o y�T<�"?S>D �7>zUT0�SS • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
m��~=VUhPd 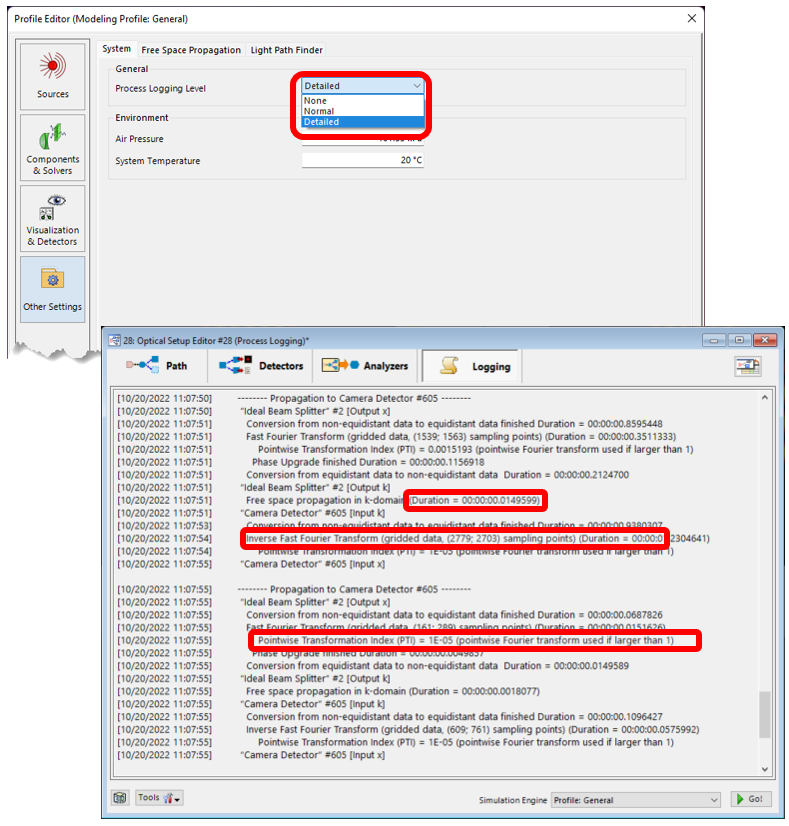 'S}3�lsIE� ��vt"�b�B� 系统仿真分析 �~�b��*|�V +Goh`!$Rj9
'S}3�lsIE� ��vt"�b�B� 系统仿真分析 �~�b��*|�V +Goh`!$Rj9 • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
_�0
4��3,� 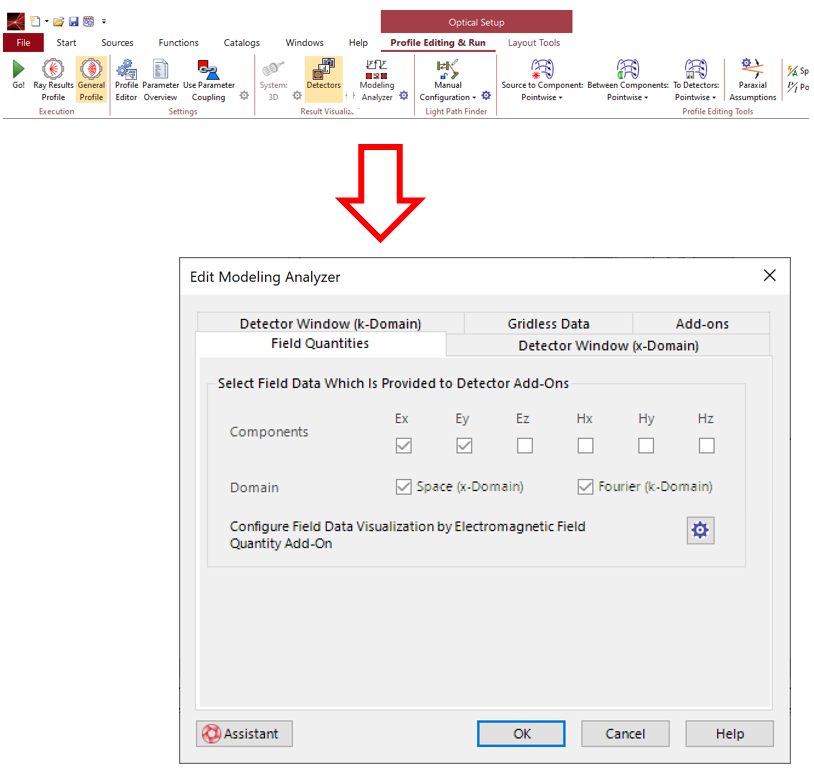 0u�"�j^v� ��(ZF~
��� 专家模式(Expert Modus) t^B�s�3;E^ A]�Q��GaWK 专家模式中的数据阵列’Manipulations’ 21<Sfs�c�$ SefF� Ci%4 -h|�[8UG^b
0u�"�j^v� ��(ZF~
��� 专家模式(Expert Modus) t^B�s�3;E^ A]�Q��GaWK 专家模式中的数据阵列’Manipulations’ 21<Sfs�c�$ SefF� Ci%4 -h|�[8UG^b • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
�g@O?0,+1 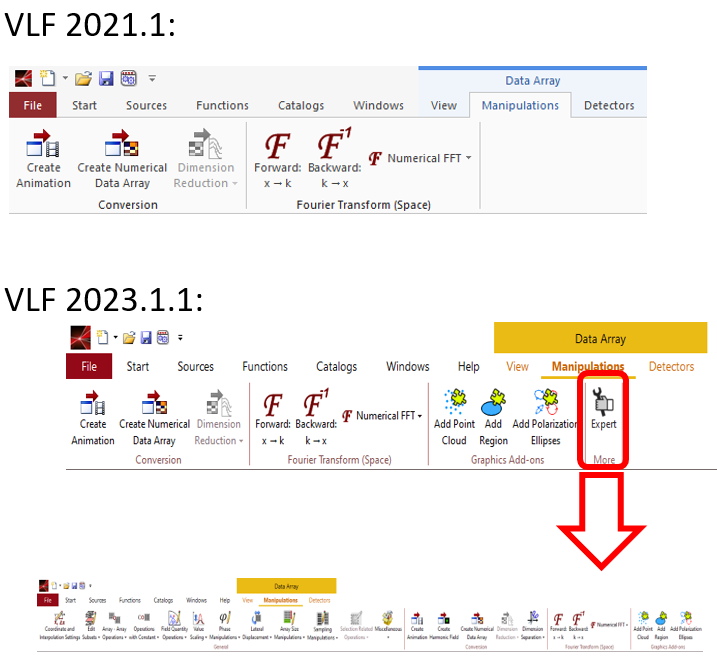 rv�hMu}.�� 66�B,Krz1n 微小的改进帮助:新的计算器 {gEz�;:!): c'?�EI EP� $�bpu����
rv�hMu}.�� 66�B,Krz1n 微小的改进帮助:新的计算器 {gEz�;:!): c'?�EI EP� $�bpu���� • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
Z8�h;3��Ek 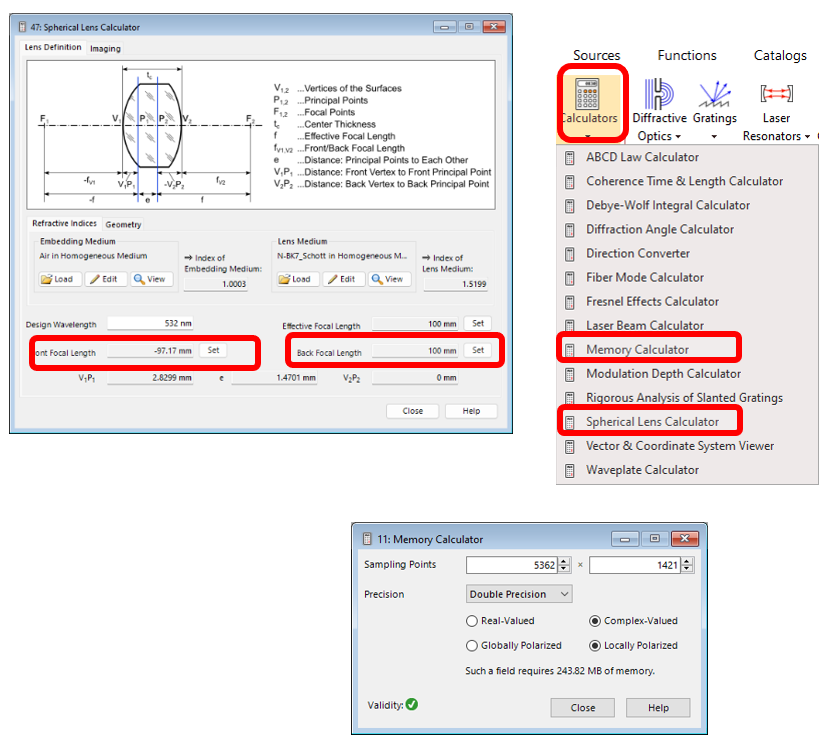 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



