2022 年 12 月,发布 VirtualLab Fusion 2023.1 ,82�S=N5V! VirtualLab Fusion 2023新版本更新内容(三) 0�!4Ts3qn1 2023.1版本新特性一览 8�H%;W�U9- p��)KheLiZ 基本信息 *D'22TO[[!
D>`xzt�'.6
 y*4�=c�_Z
y*4�=c�_Z  �0eT(J7[ <
�0eT(J7[ < VirtualLab Fusion 2023.1新版本
主要更新方向 x�sIY7Ss U
 G"���r1+�#
G"���r1+�#
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 ��DBo%fYst
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: u�}#(.)a�:
- 更快的速度 �R|6C��v3:
- 更容易使用 K?6�jXJseb
- 融合更多物理光学模型 GoJ.&aH $
- 更高的透明度 ���rlM�L�W
- 多元的仿真控制选择 w��^\�52��
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。
��|tKsg�j
bHY=x}�H�v
�+KF^�Z$I�
功能概述(以下为更新内容的详细解释和案例展示): :�">!��r.Q
数据视图 Z_L�F�Iz*c
n7zm>�&�� VLF 2023.1数据视图 �4zXFuTr($ 4.k�0�<��� 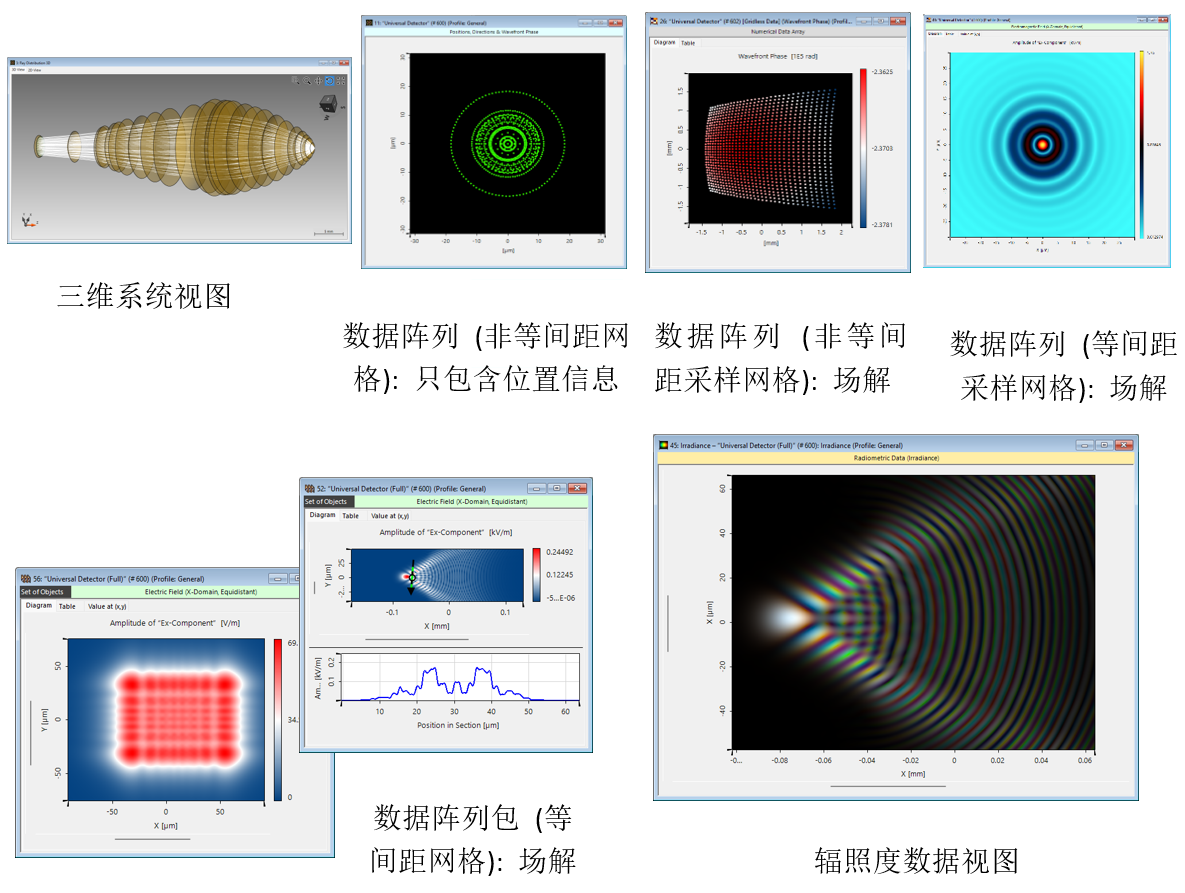 vHgi�<@u xipU8'ac�/ VirtualLab Fusion 2023.1数据查看方式 �DHy�q^p�J
vHgi�<@u xipU8'ac�/ VirtualLab Fusion 2023.1数据查看方式 �DHy�q^p�J
uu-�P�JTNZ
 5Y.)("1f}f -z
ID ��x� 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 .�u�)X3..J 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 Bn�X0G1�|# 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 T]^6��2(So 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 ��w�x]0p 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 �4n#��M���
5Y.)("1f}f -z
ID ��x� 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 .�u�)X3..J 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 Bn�X0G1�|# 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 T]^6��2(So 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 ��w�x]0p 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 �4n#��M���
�+G$4pt|=�
j��%Y#(�Q>
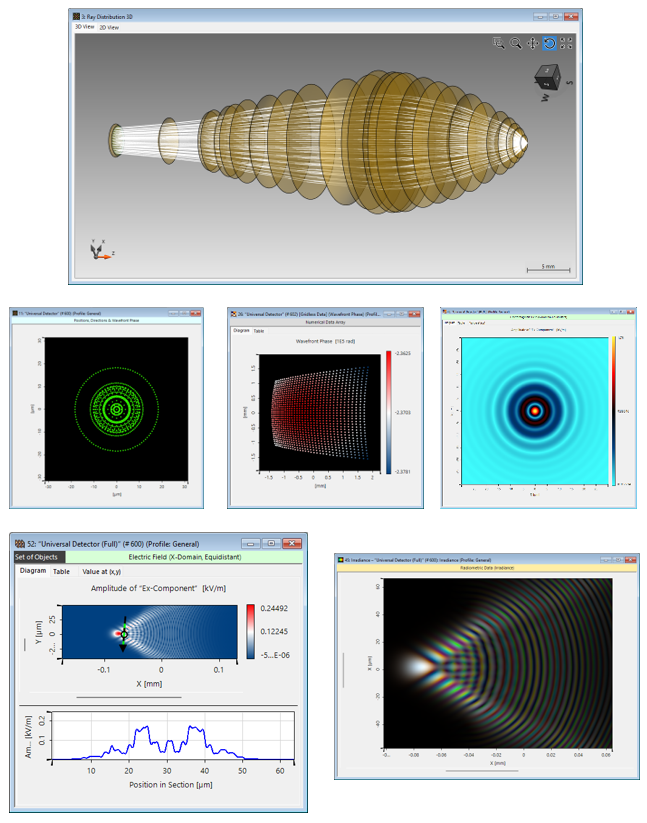
三维系统视图: 新的对话框以及设置选项 �Yz'K]M_Dq
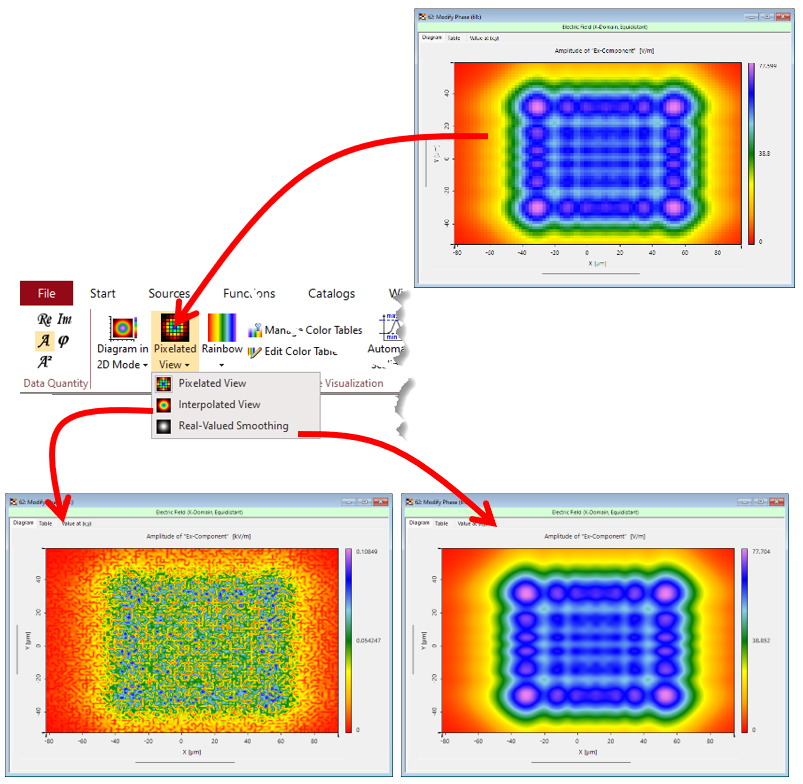
KWq+PeB5TS 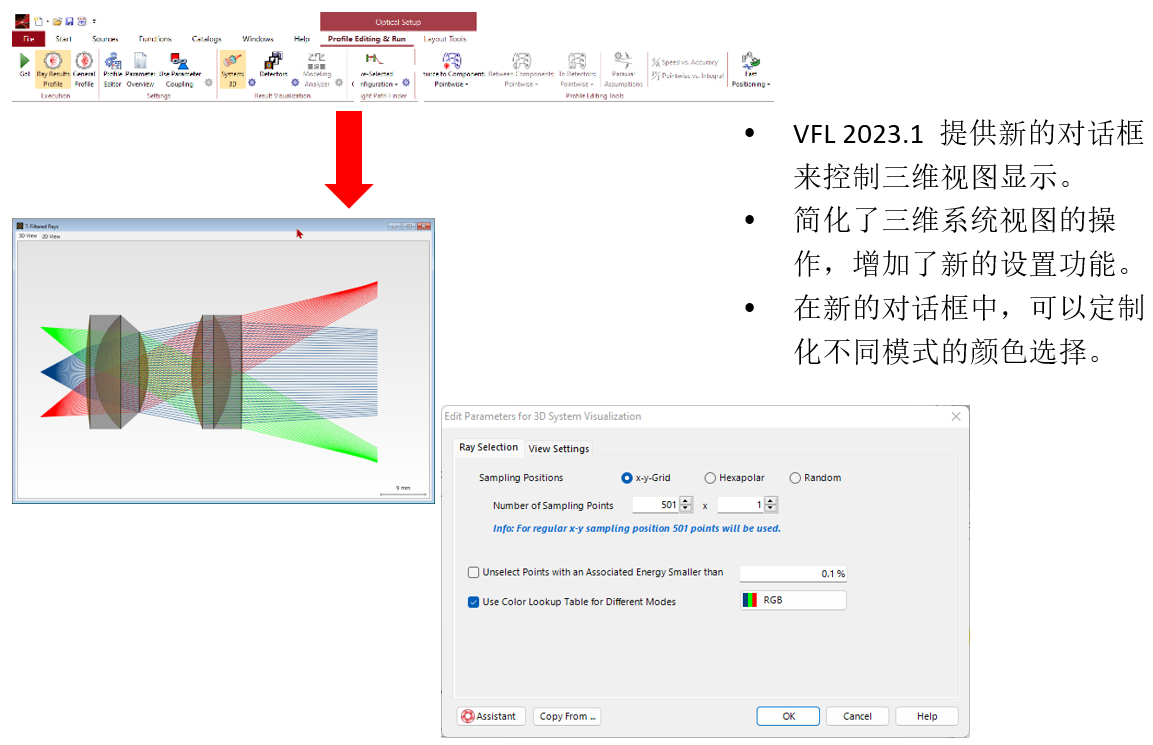 ]O�e2JfJwx ���7LfAaj 数据阵列视图: 像素数据(Pixelated Data)平滑 8^kG�S-+^� !eGC6o�}�f • 探测器中的像素越少,探测器评估速度更快。 s�,�"]�aew • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 ��y�;4O�Y� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 6,�^>�mN�m 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 Wj��o[ENHM
]O�e2JfJwx ���7LfAaj 数据阵列视图: 像素数据(Pixelated Data)平滑 8^kG�S-+^� !eGC6o�}�f • 探测器中的像素越少,探测器评估速度更快。 s�,�"]�aew • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 ��y�;4O�Y� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 6,�^>�mN�m 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 Wj��o[ENHM
ntu5��{L'8
 )1Y{Q Y}�l
)1Y{Q Y}�l
,L|%�"K]yM
数据阵列视图: 像素数据(Pixelated Data)光滑化 �Ja|5�� �@
y�|jl[pyg)
\��q�>bs|2
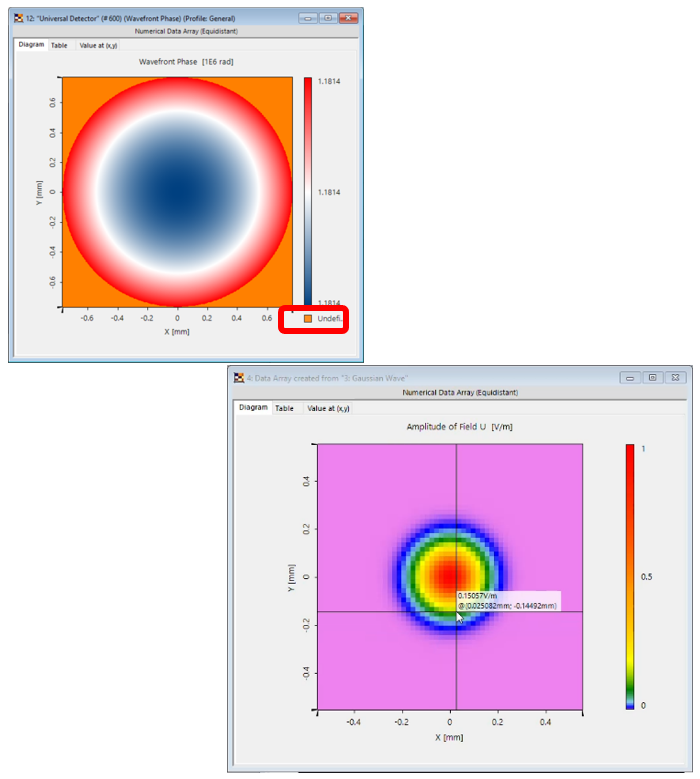
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �%h hf�U6[
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 ;d@#XIS&-(
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 �=��h�-�U
-{KQr1{5UM
 MH
=%-�S �
MH
=%-�S �
_no/F2>!/n
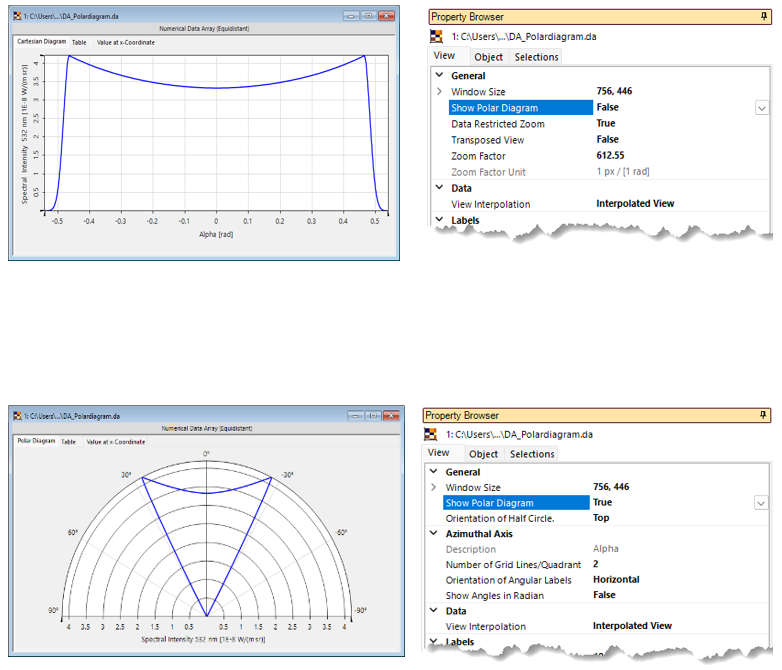
数据阵列视图: 极坐标图(Plolar Diagram) O��n8v//=&
Ka'=o�?'B5 • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 I!�ED��?n� • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 u�^^�vB\"^ • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 ��p9��9��] • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 pD�8+� 4;A
9d>-�MX�'
 *H�g>[@dP0
*H�g>[@dP0
����Z< �1
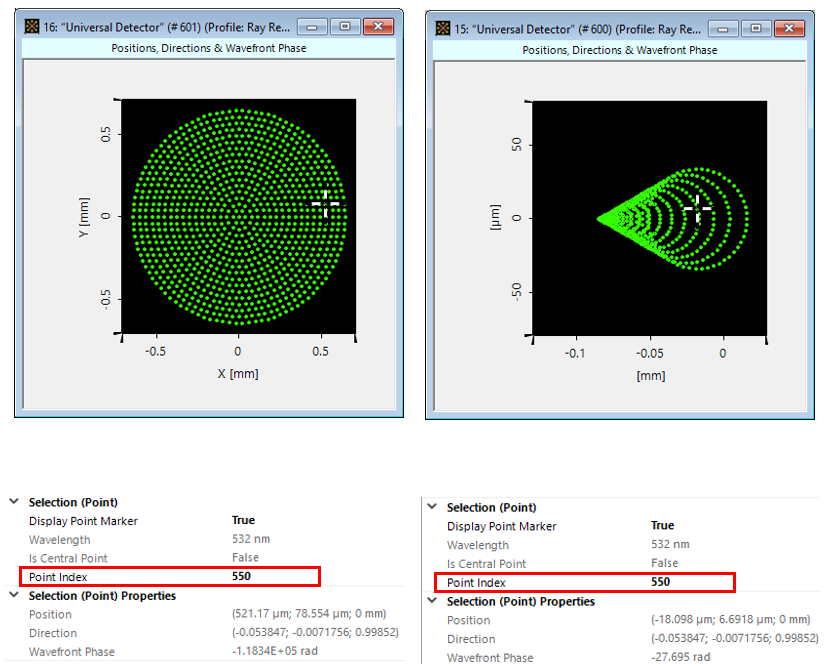
数据阵列视图:找寻以及点的标识 2�\)xpO�j�
_Ym]Mj' ln
<S�5�BDk�
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 L� s
�G\OG
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 0^v`T%|fTX
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 }cM}�Oav�h
2E���lJbN#
 \9.bt:k@OT
\9.bt:k@OT
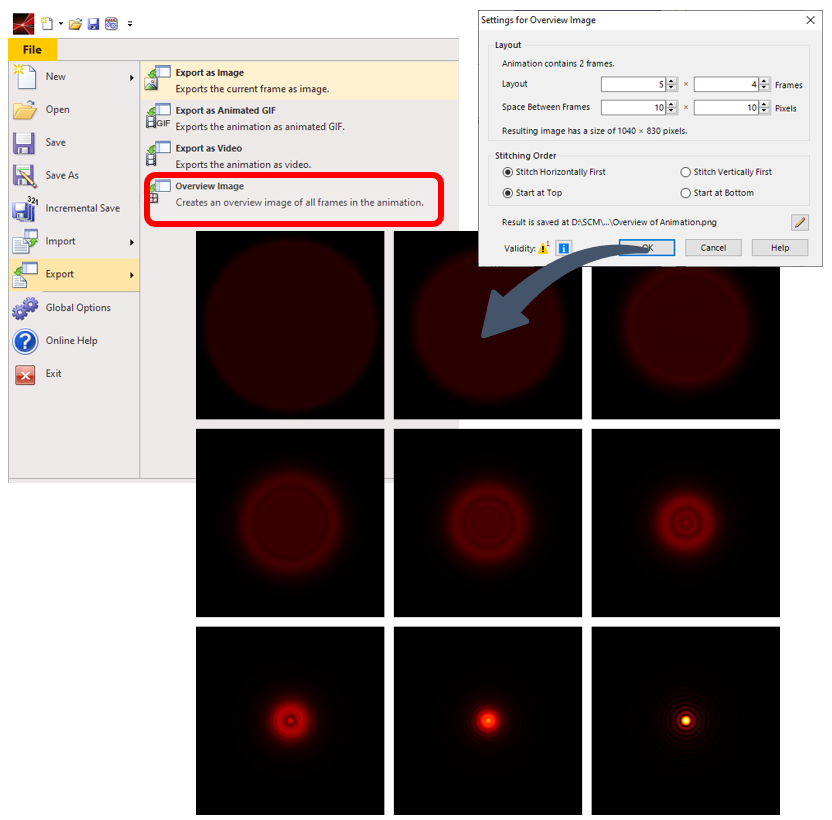
�|+�{��)_? 导出图像的概览 FW�;m\�vu� R$�EW4]j�� �/~DI� 6�g
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 ajve~8�/&
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 q'�+)t7!��
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 �#9=�V�g� p�Xtl
6K%
 #.�/fY;:cj
#.�/fY;:cj
CYt?,qk-�r
数据阵列视图: 更多的新功能 >R|/M`�<ph
J�;�S
(>�c
+[�Dx?X�M
• VFL2023.1可以对未定义区域填充不同的颜色。 3�D6RLu���
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 ��pLl(iNf]
ZVW'�>M7.
 �pk>�^?MO�
�pk>�^?MO�
PG2:�~$�L0
Graphics Add-ons提供更多数据视图选择 f@6�Qv�kIa D,�FHZD�t JX<)EZ!�F�
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 sZ'n��Y��o
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 �a a<8�,;
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 �t1]�K<>g� ��UJ%�R
��  ��2��L�!u1 .�2�8<�tEf �p$�O�.>
[ Graphics Add-ons提供更多视图选择 �|Yx�~�;q: RXNn[A4xfY
��2��L�!u1 .�2�8<�tEf �p$�O�.>
[ Graphics Add-ons提供更多视图选择 �|Yx�~�;q: RXNn[A4xfY • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
%Cel�c#��v • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
CZ8KEB�l� • 图像组件提供了多样化的配置选项。
�G3t��x�j� �^0Zf,4�0� 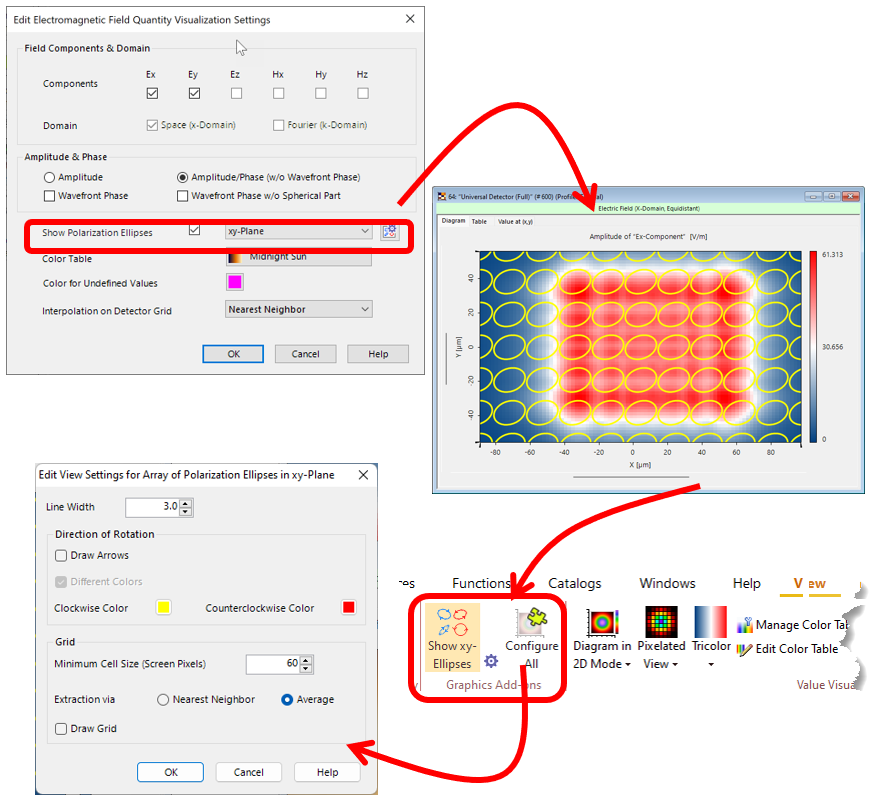 �'|ad�_M�� q�jc�8�fP2 �e4-�@�f%5 Graphics Add-ons: 增加了 Point cloud 功能 FW.7'7G@�n vjLJi�n�J/ eJ,/:=QQ�{
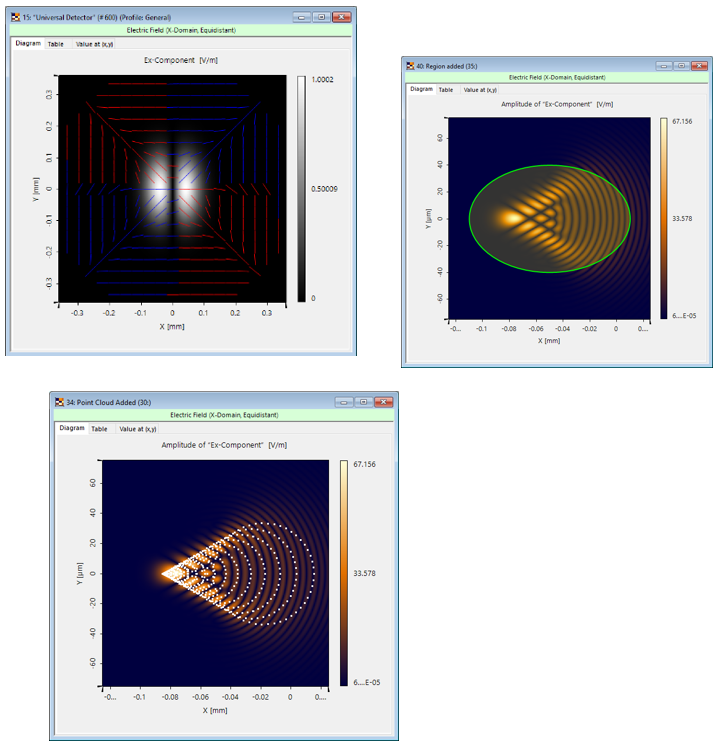
�'|ad�_M�� q�jc�8�fP2 �e4-�@�f%5 Graphics Add-ons: 增加了 Point cloud 功能 FW.7'7G@�n vjLJi�n�J/ eJ,/:=QQ�{ • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
'Jiw@t<o3` 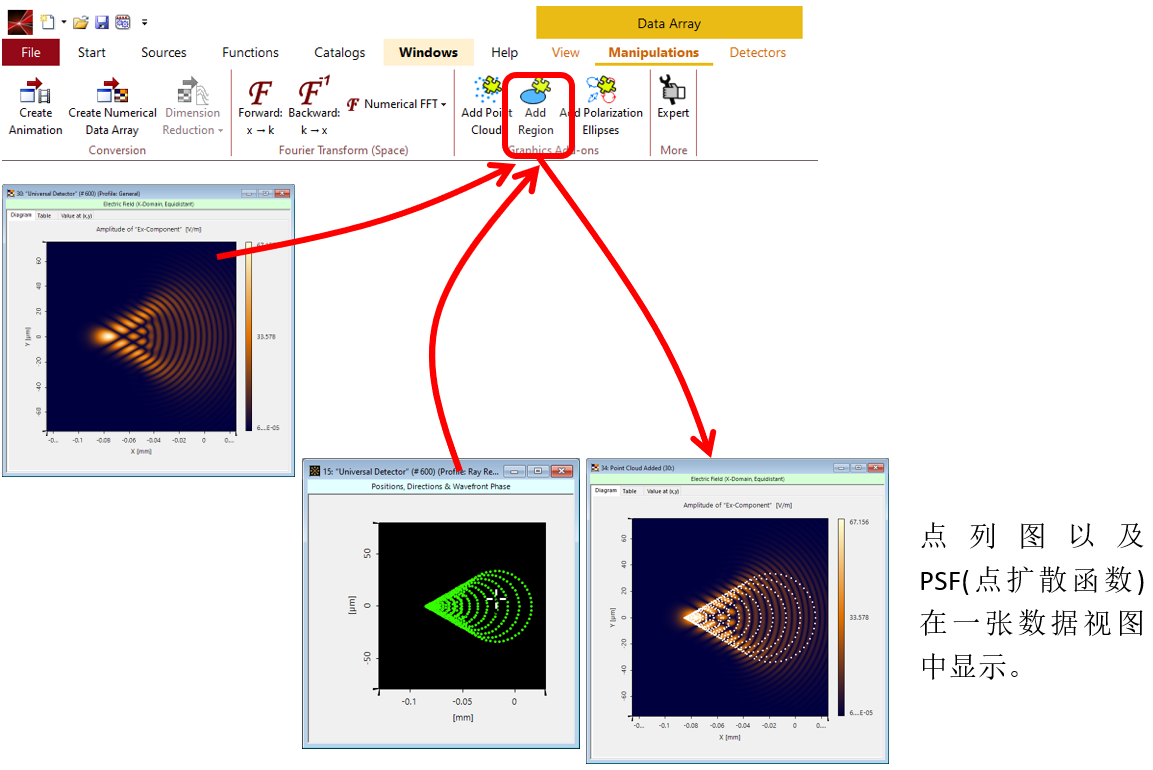 =pr�`��'�� rW<KKGsRWQ VirtualLab中的区域 (Regions) w?3p�';C�� v/@^Q1�G/: �^�9m�\=5d
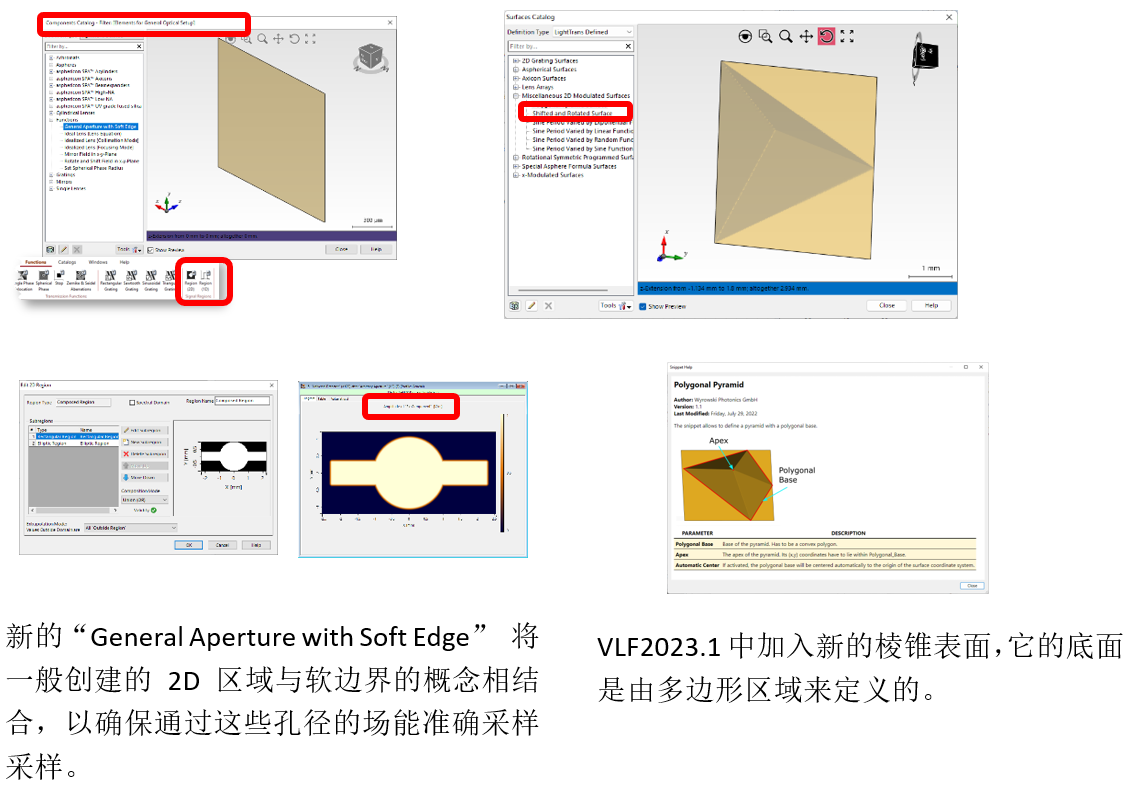
=pr�`��'�� rW<KKGsRWQ VirtualLab中的区域 (Regions) w?3p�';C�� v/@^Q1�G/: �^�9m�\=5d • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
>1s*
at/�h 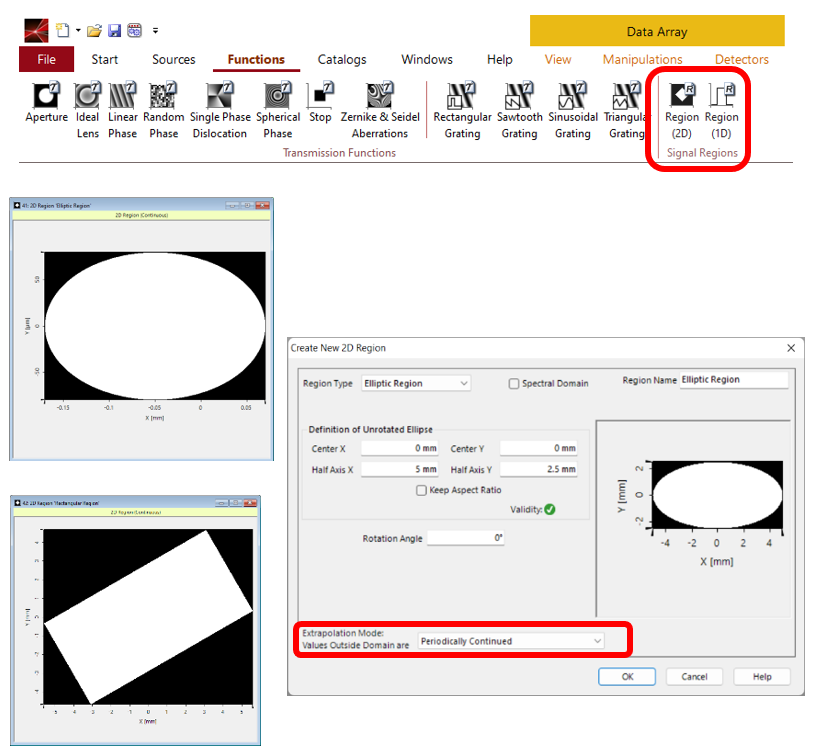 to�LV4BtIG ph�QU��D�� Y�1L[;)H�n Graphics Add-ons: 添加区域(Add Region) 16w|O�|^<� {�SOr#{1z* +ndaLhj'�
to�LV4BtIG ph�QU��D�� Y�1L[;)H�n Graphics Add-ons: 添加区域(Add Region) 16w|O�|^<� {�SOr#{1z* +ndaLhj'� • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
ksc;X�$f&4 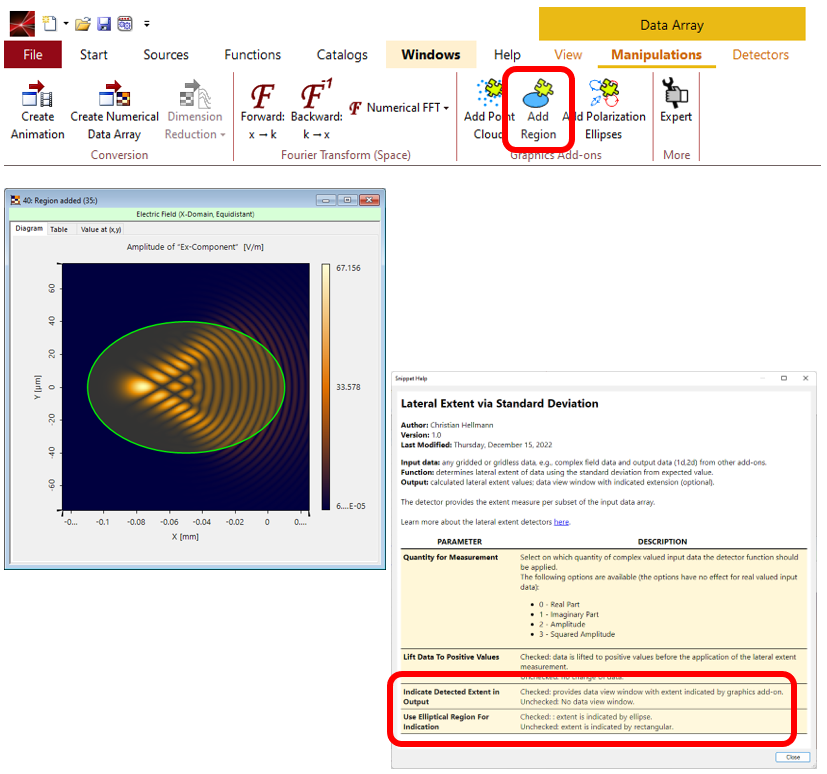 SII;n2[Ze v�>:Ur}u!D
SII;n2[Ze v�>:Ur}u!D 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
j
>Ht��@Wi @#�<D�� ^" Graphics Add-ons: 添加区域(Add Region) ��?fiIwF�) %}[i'�rT�> �]99|KQ<s • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
iM�A�fJ-oN '�g6\CZw(# 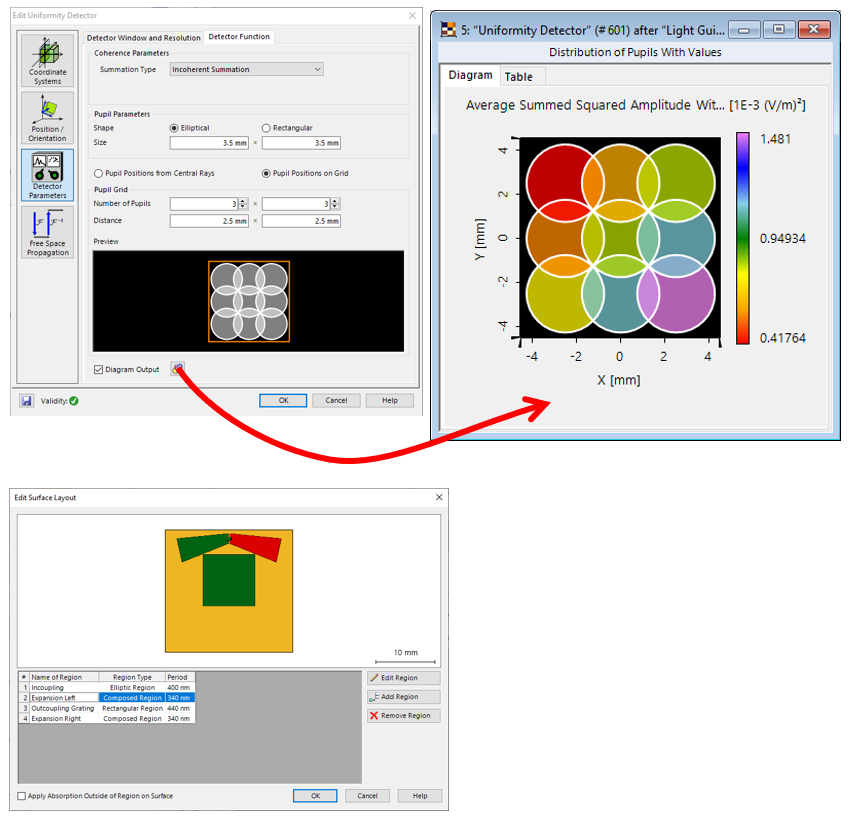 \4�&��fxe
\4�&��fxe • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 �6O|�@x�vg �Z|%�_�&�M Bz^j��w>1b • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
�O $LfuL • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
�1!i�i;s^e 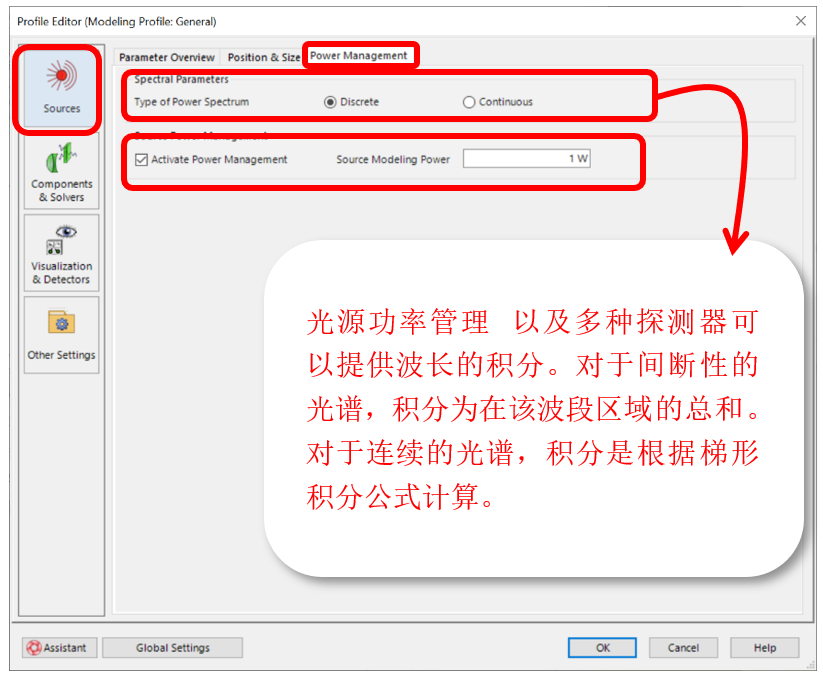 V��Q"hUX�8
V��Q"hUX�8 • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
Sw:7pByj�I 1. 针对给定光源参数,进行光源功率的评估。
���R}��'bP 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
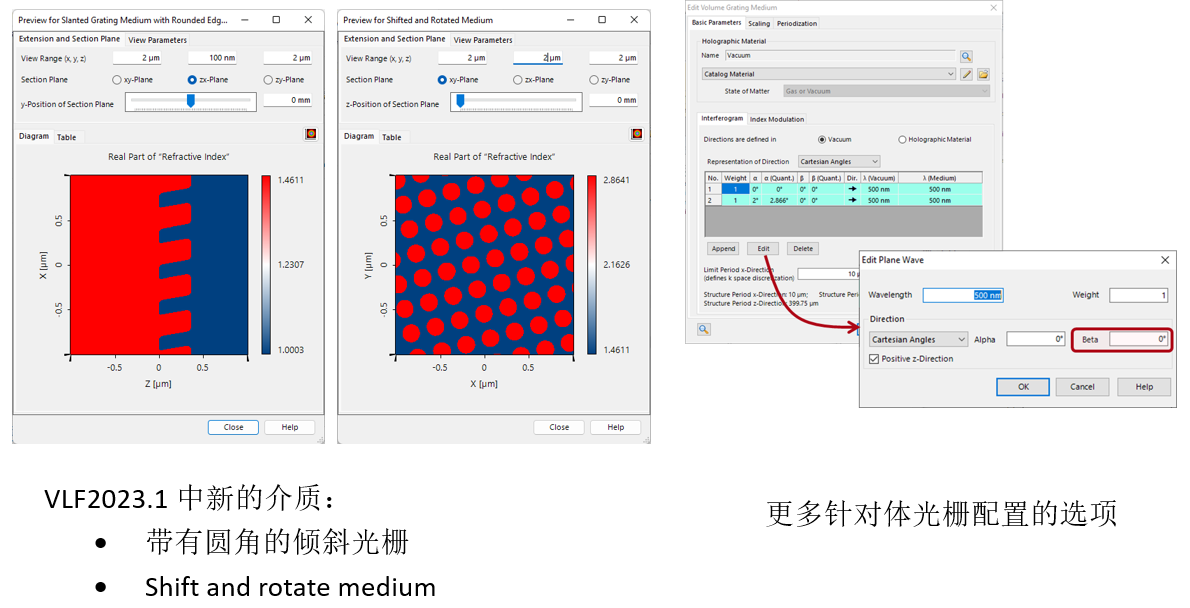
�P �!AEf#1 LVX[�u�WEM 组件 y.�a�n���l 组件(Component)新的特征 Olt��`:;j- !4�]T�XH0f �%�u��?�># • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
3K�o�/{��f 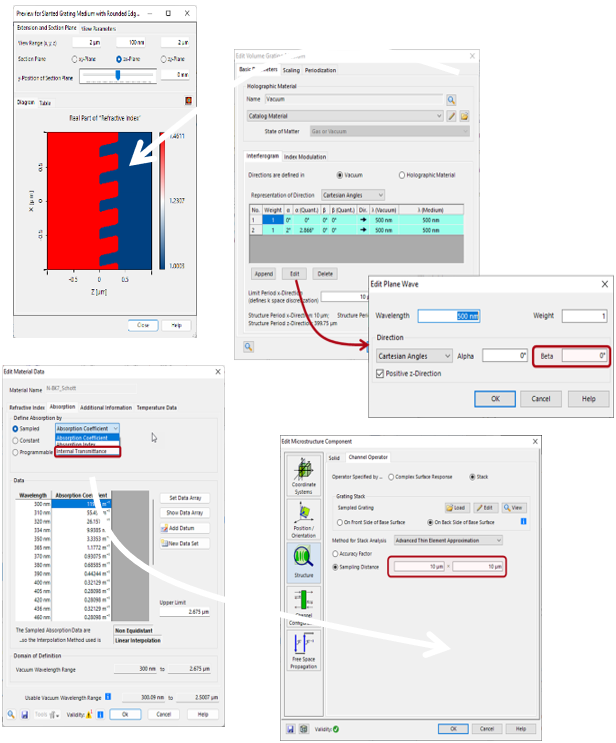 pqk?|BvpK_ >x/z7v?^I� 组件(Component)新的特征 �o���#��;b
pqk?|BvpK_ >x/z7v?^I� 组件(Component)新的特征 �o���#��;b
nv GF2(;l�
 2�I%MAb&1@
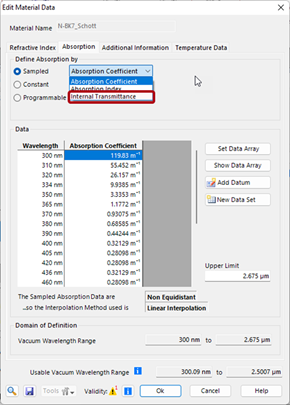
2�I%MAb&1@ 吸收特性可以用采样数据定义吸收率以及透过率。
�pSoiH<3�3 7OC����#8, 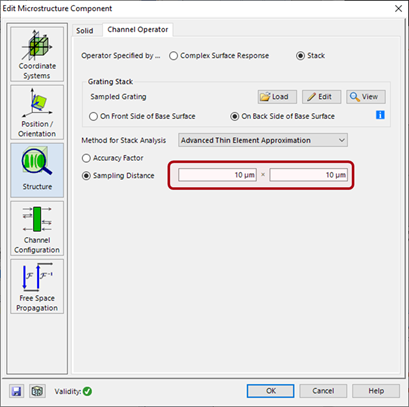 *�Tas�`WA� ~:0sk"t�$1
*�Tas�`WA� ~:0sk"t�$1 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
46$.�_h
P -jW.TT h]� 组件(Component)新的特征 ]@dZ�{H��|
mi
ik�%7>W
 �,C
��K�{F C.~,�q�mOP 组件(Component)新的特征 k�EJ�j�=wx
�,C
��K�{F C.~,�q�mOP 组件(Component)新的特征 k�EJ�j�=wx
lAi6sPG)0
 N|1M1EBOu> �e�_#.�_Pi 组件(Component)新的特征 9�K�p�a>�<
N|1M1EBOu> �e�_#.�_Pi 组件(Component)新的特征 9�K�p�a>�<
�,eOB(?Ku�
 hq%?=�2'9? $��Oq^jUJ uP�hK3nCGo
hq%?=�2'9? $��Oq^jUJ uP�hK3nCGo 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
vBRQp&Yw�X 处理日志 R,gR;Aarw� K:!��"+�q� 扩充版的处理日志 }
uO);�k5H 4�S5,�w(6N *�$yR*}�A� • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
�1s%#$� �7 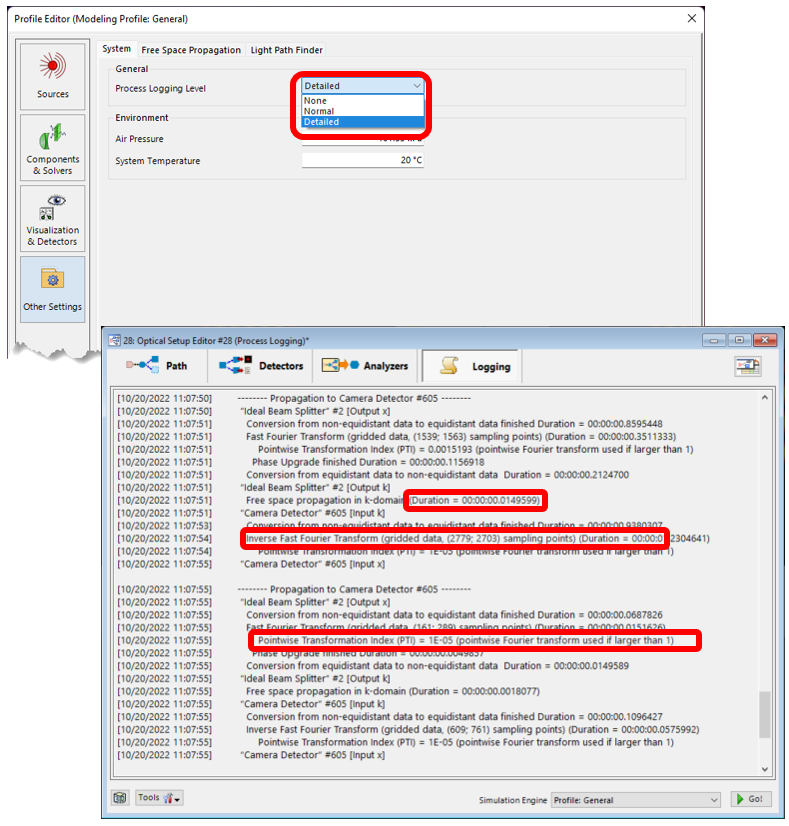 JX��-'
mV` 6� 2'j!"xv 系统仿真分析 ;L�cVr13J/ ?a��8^1:��
JX��-'
mV` 6� 2'j!"xv 系统仿真分析 ;L�cVr13J/ ?a��8^1:�� • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
@�AG��n�{q 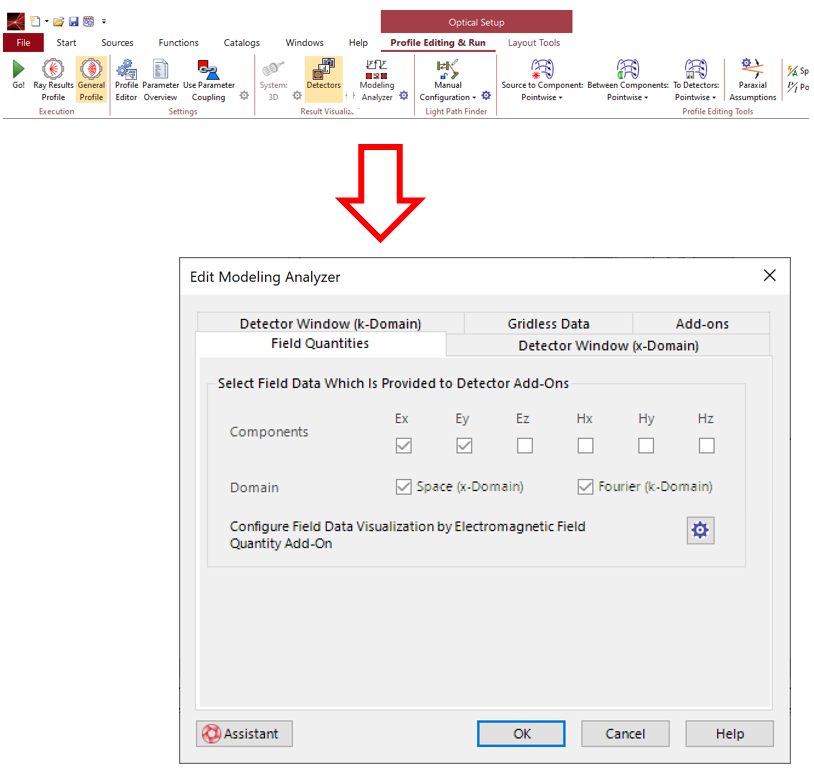 r) HHwh{9 i8`Vv7�LF� 专家模式(Expert Modus) lU��@�]@_< mZk]�l5�Lc 专家模式中的数据阵列’Manipulations’ �l����H#u�
�>[M�X:Yh +Fuqch�jq�
r) HHwh{9 i8`Vv7�LF� 专家模式(Expert Modus) lU��@�]@_< mZk]�l5�Lc 专家模式中的数据阵列’Manipulations’ �l����H#u�
�>[M�X:Yh +Fuqch�jq� • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
P=7z��s;�k 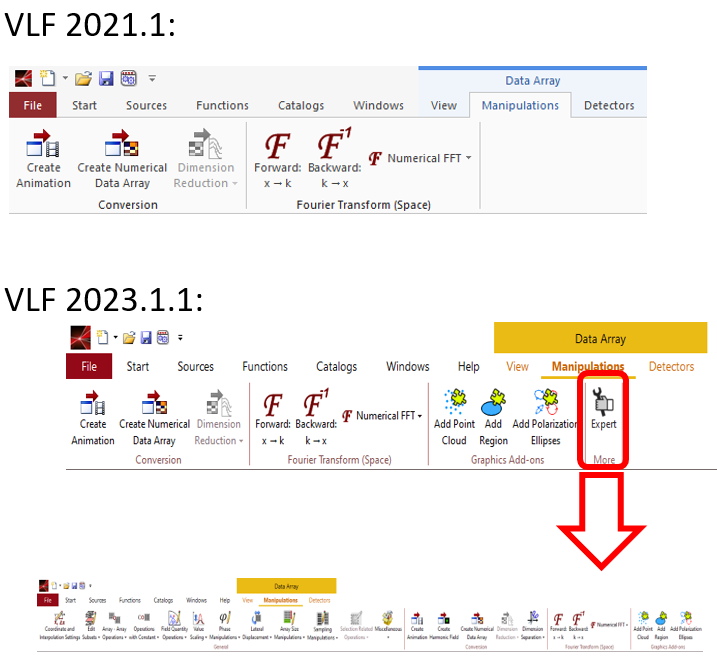 os,* 3��WO >XK
PT�C5H 微小的改进帮助:新的计算器 "*m�_> IU ZZ�k=E4aae QFw� � +cy
os,* 3��WO >XK
PT�C5H 微小的改进帮助:新的计算器 "*m�_> IU ZZ�k=E4aae QFw� � +cy • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
s��1�=X>'q 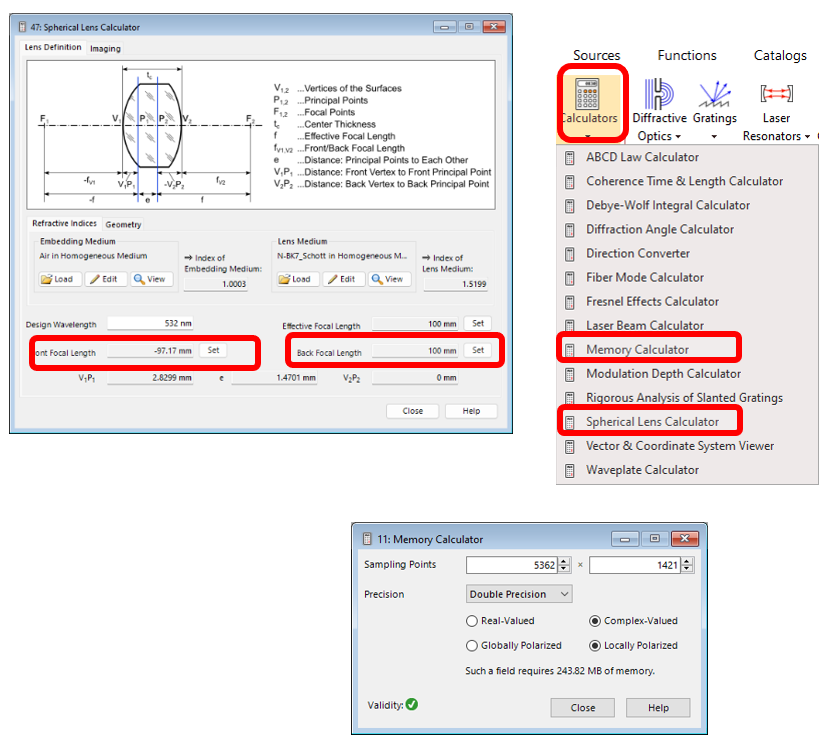 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



