2022 年 12 月,发布 VirtualLab Fusion 2023.1 �;R#R�dUFH VirtualLab Fusion 2023新版本更新内容(三) Y:,�C_^$w; 2023.1版本新特性一览 �43M.�Hj] �?2Z`xL9QT 基本信息 4OgH+<G��
a~_JTH�4=t
 F!)[H�["�_
F!)[H�["�_  wS�#��Uw_[
wS�#��Uw_[ VirtualLab Fusion 2023.1新版本
主要更新方向 �GP��h��hg
 ����&;P�\e
����&;P�\e
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 4=|�Q2qgFV
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: A-=hv�J�5T
- 更快的速度 UWV%���y P
- 更容易使用 >uq0}H�B$a
- 融合更多物理光学模型 ��'�F.P93
- 更高的透明度 ��Q�r3!��6
- 多元的仿真控制选择 E�w�Fq1~��
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 q@�[F|EF=�
eUB!�sR%�
(�Q%�
@]��
功能概述(以下为更新内容的详细解释和案例展示): �h`N2�M,�
数据视图 *p\Z�c*N;%
YF-E1`�+?< VLF 2023.1数据视图 �dEK�u5GI� tNzO1��BK� 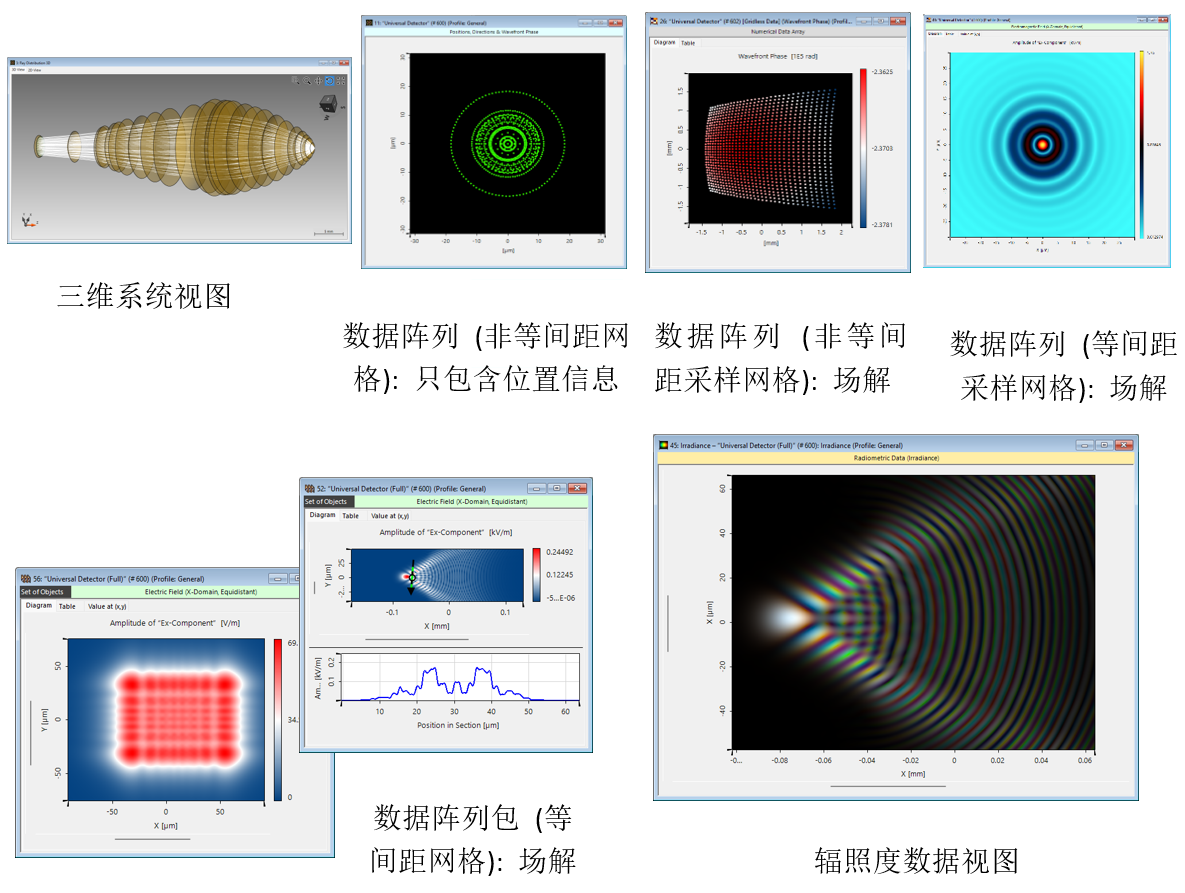 7>O`UT<t4@ .-tR <{
g� VirtualLab Fusion 2023.1数据查看方式 ��Zf!Q4a"
7>O`UT<t4@ .-tR <{
g� VirtualLab Fusion 2023.1数据查看方式 ��Zf!Q4a"
8_H�BcZW�s
 zs
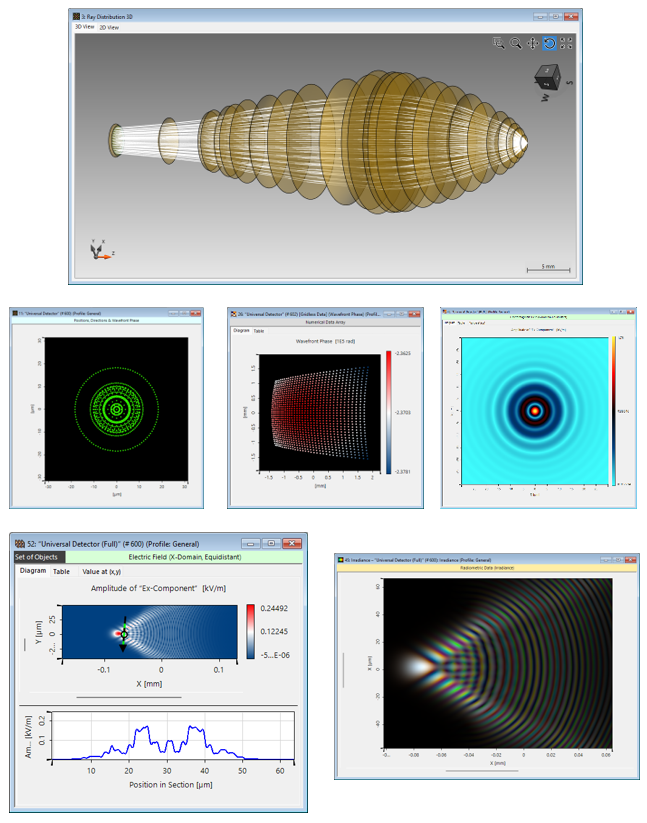
I?��X>4 r1<*=Fs=>> 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 +<[�q"3��� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 `T��yd1!~� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 1Xm>n���F~ 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 e�z��[x8M> 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 Tf]ou5���|
zs
I?��X>4 r1<*=Fs=>> 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 +<[�q"3��� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 `T��yd1!~� 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 1Xm>n���F~ 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 e�z��[x8M> 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 Tf]ou5���|
Ru*�gbv,U
a��}F�yJp
三维系统视图: 新的对话框以及设置选项 CQ/+- �-�o
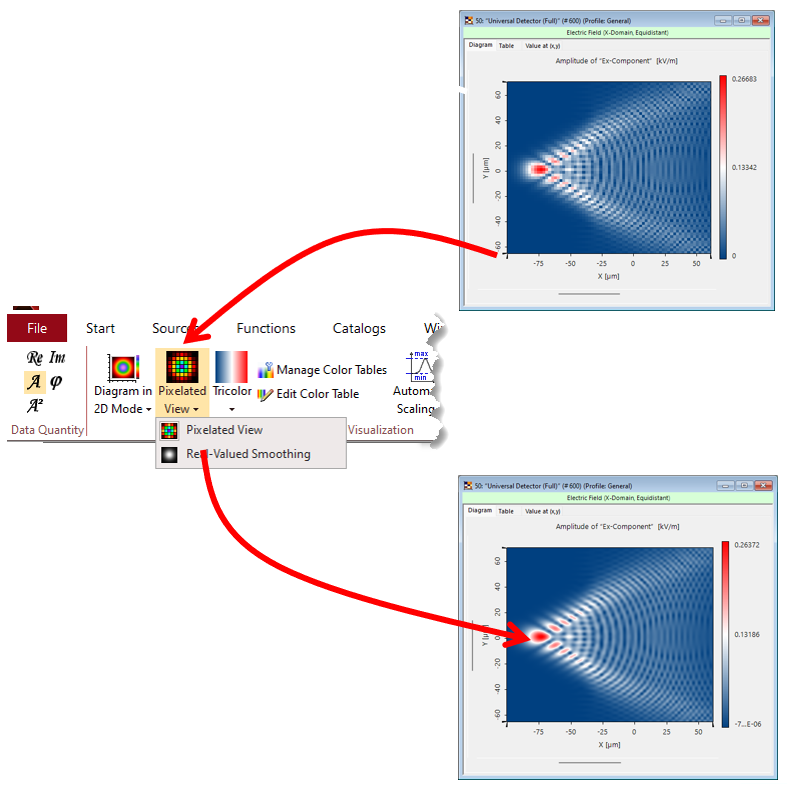
�S�Q�[D2v 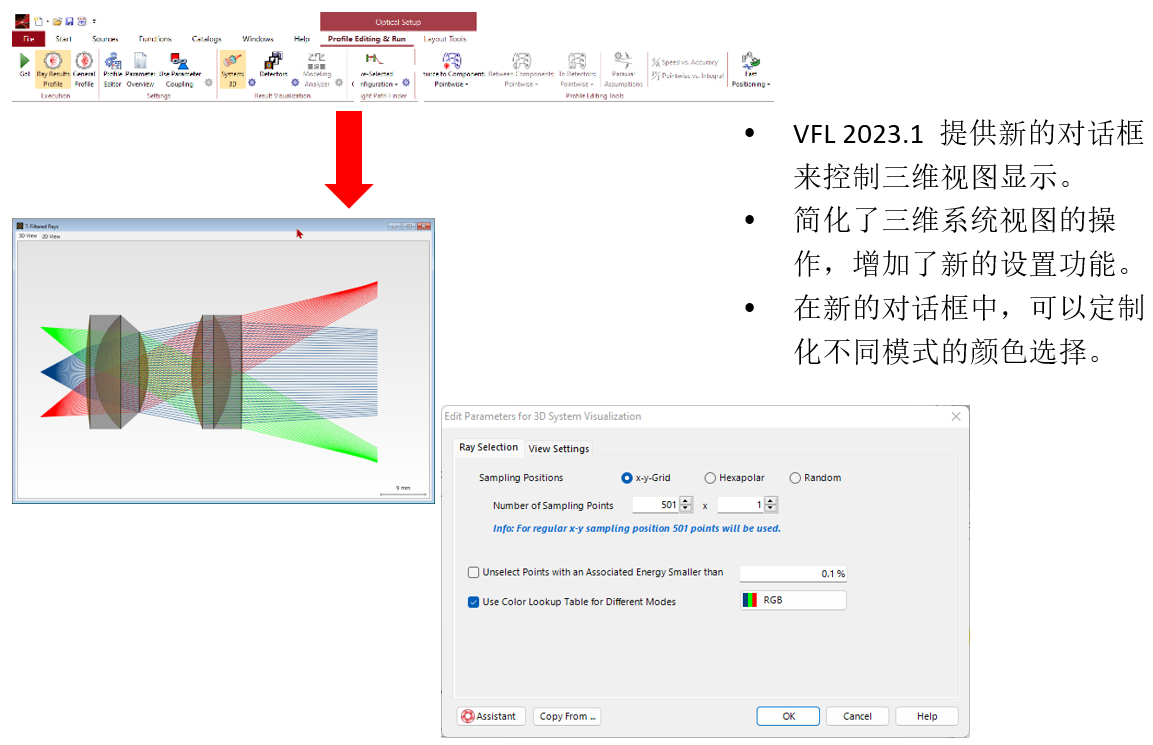 }l$zZ�>.\H c]�#}#RJ`\ 数据阵列视图: 像素数据(Pixelated Data)平滑 �!�Ea!�"} �q�/�I�( e • 探测器中的像素越少,探测器评估速度更快。 �*|\�bS �" • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �s�a o��&� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 m�L�`8CO�A 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 {�X(nn.GpC
}l$zZ�>.\H c]�#}#RJ`\ 数据阵列视图: 像素数据(Pixelated Data)平滑 �!�Ea!�"} �q�/�I�( e • 探测器中的像素越少,探测器评估速度更快。 �*|\�bS �" • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 �s�a o��&� • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 m�L�`8CO�A 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 {�X(nn.GpC
�w�$f_z*/�
 6�X �h7Bx1
6�X �h7Bx1
?|�W3R�K�;
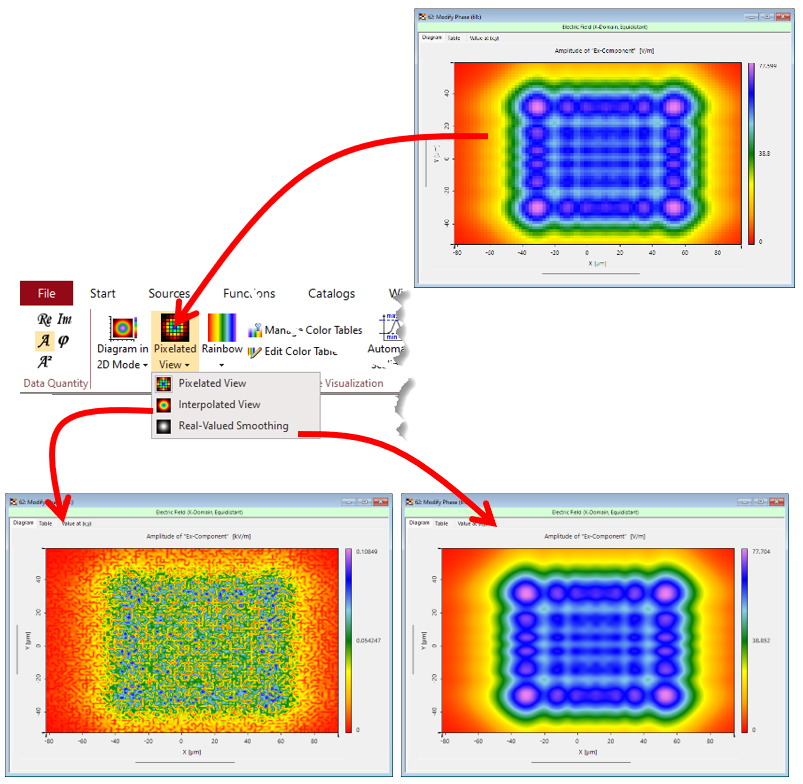
数据阵列视图: 像素数据(Pixelated Data)光滑化 �,s���3|��
PL�$XXj>|:
/K&9c
!]$C
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 u]Vt>Y�wu
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 )?#�K0�o[<
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 0:[A�4S`�X
-kLBq�:�M�
 /Ls|'2�J<$
/Ls|'2�J<$
B�j���\
x
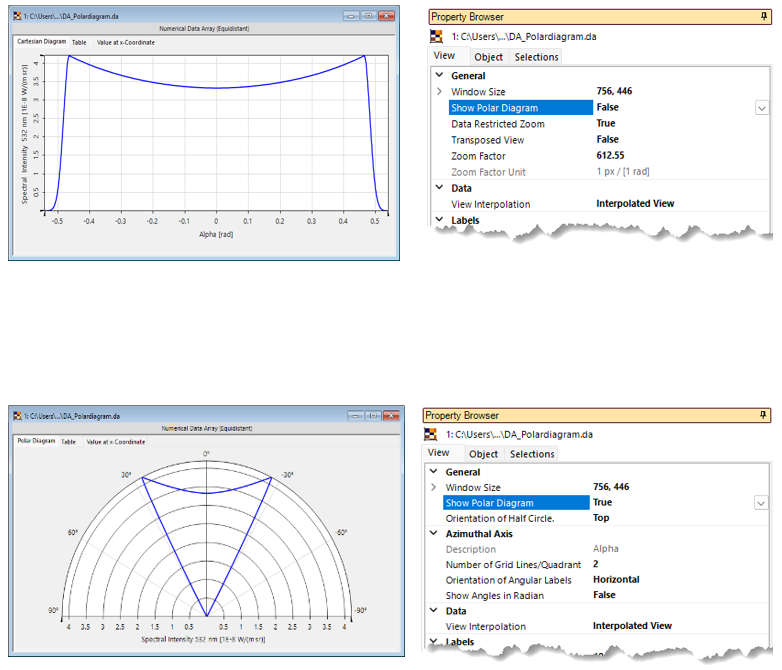
数据阵列视图: 极坐标图(Plolar Diagram) d>�)�=�|�
��v {HF�}L • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 �er��3~gm • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 IL.bwt�pQD • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 ,%IP27bP�W • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 dyn�)KDS��
h?n?3��x!(
 E<3xv;v8�r
E<3xv;v8�r
v%*d�o��n�
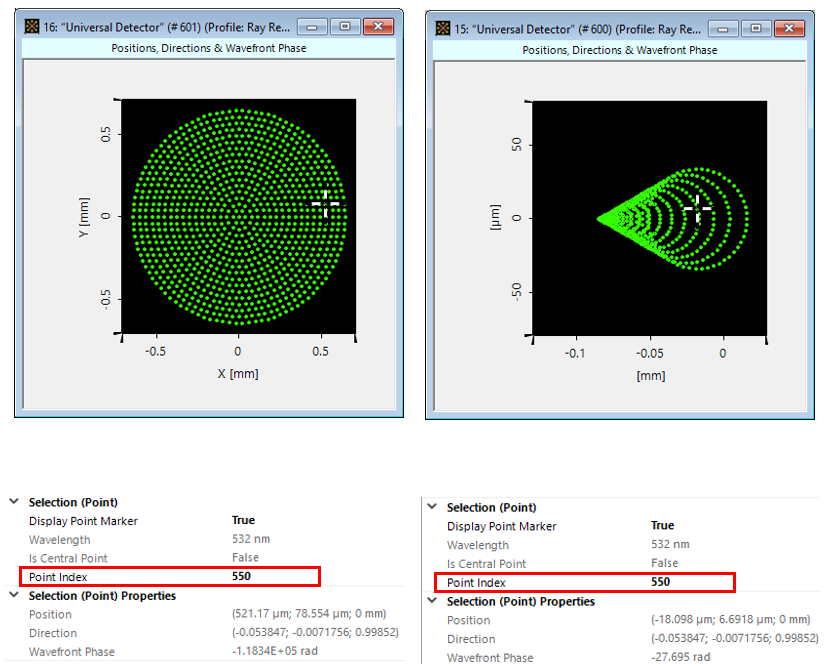
数据阵列视图:找寻以及点的标识 �"0;WY��w?
#��?S�"y:�
�lF���/
Xs
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 �5O]t�kHYR
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 C�;JW�\J~W
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 M]{�~T�7n-
8l���y)��G
 B(s^(�__]
B(s^(�__]
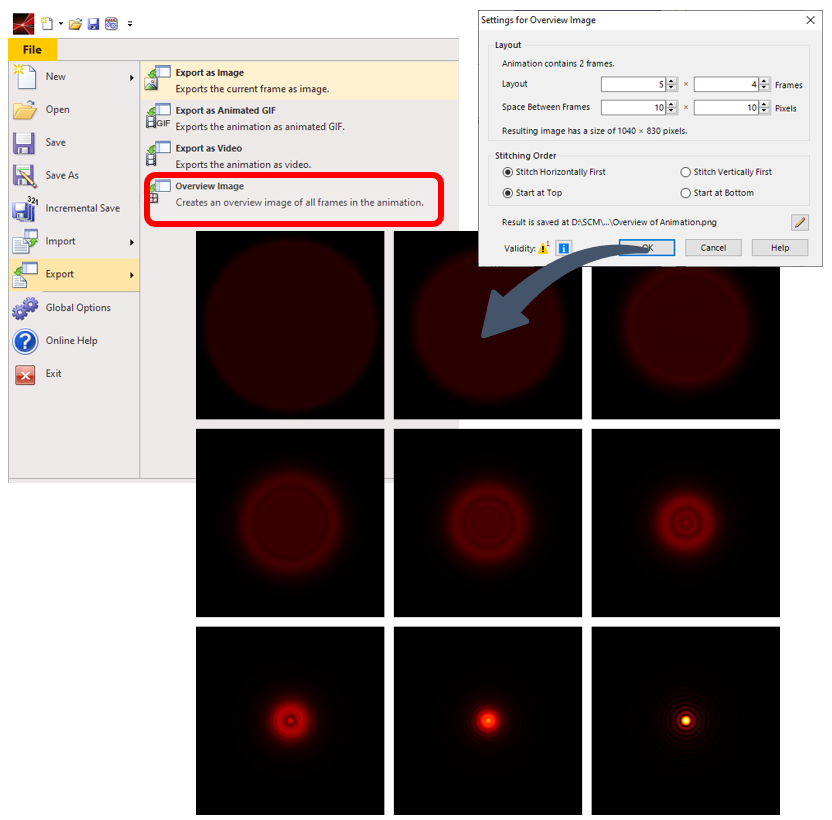
�G��^d�p9A 导出图像的概览 \a�;xJzc�9 J ��Y8Rk�= hIqU�idJod
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 ]FV�J�QS2h
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 k�l�Qmo30i
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 =bD�.5�,F) (N&?�Z]|yr
 +?�"F=.S�Z
+?�"F=.S�Z
M�}11 tUl
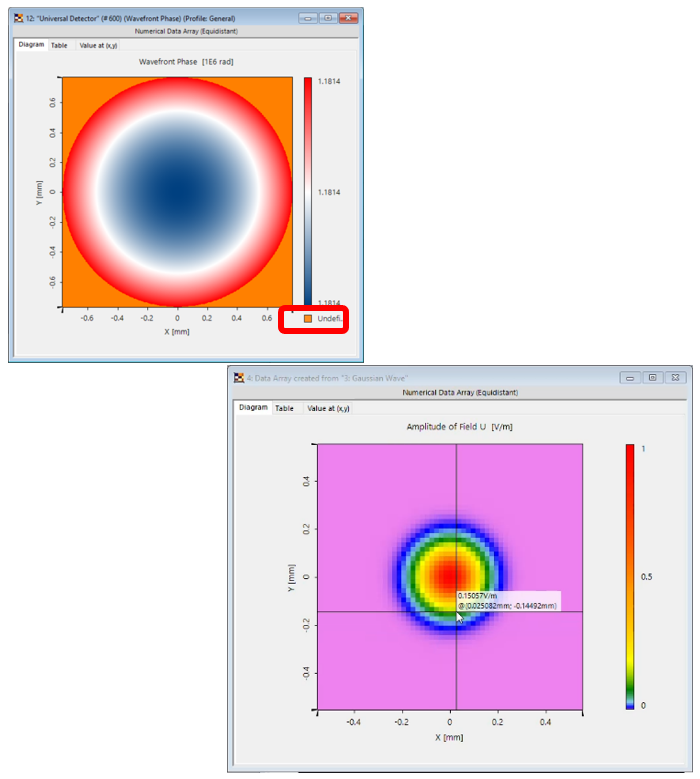
数据阵列视图: 更多的新功能 �*�>� nOL
b�v]SR_Tiq
TX$dx�HSPK
• VFL2023.1可以对未定义区域填充不同的颜色。 --�l
UEo�~
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 \w1�XOm [)
z��-g�Mk@l
 *Xk�5H��,:
*Xk�5H��,:
DQW)^j
��h
Graphics Add-ons提供更多数据视图选择 [Uz�a�cX�t �h�E=xS:�6 T�:{&�e�WH
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 HJg&fkHn1�
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 �rM= :{ ��
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 �MCibYv�c[ �$<)]~*�*K 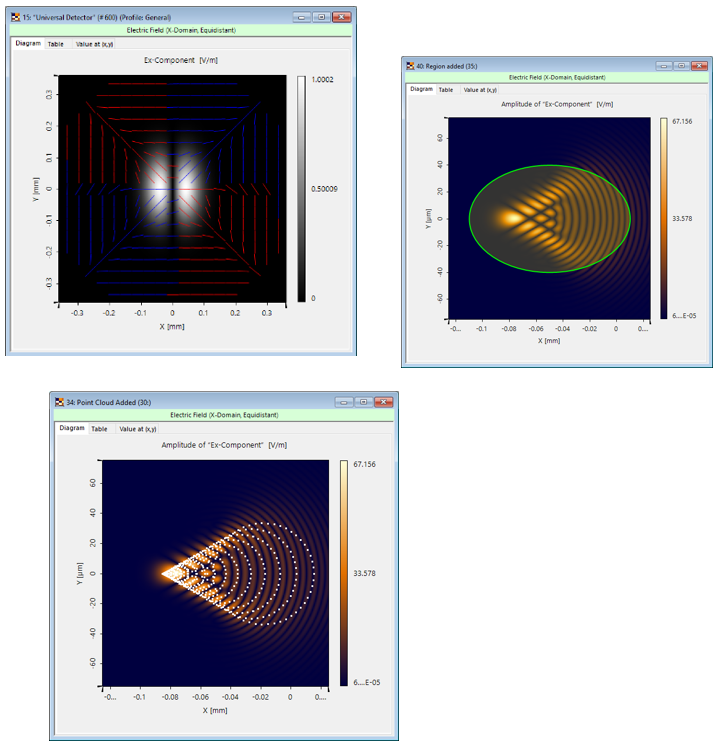 T$u�'+*
Xx dI%�jR&.e; ; ,sNRES3� Graphics Add-ons提供更多视图选择 n5"oX�pcIx �+zch����e
T$u�'+*
Xx dI%�jR&.e; ; ,sNRES3� Graphics Add-ons提供更多视图选择 n5"oX�pcIx �+zch����e • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
W���m�-$l • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
-DH�zBq=�H • 图像组件提供了多样化的配置选项。
�fTR6]i�;� aG��;F�=�e 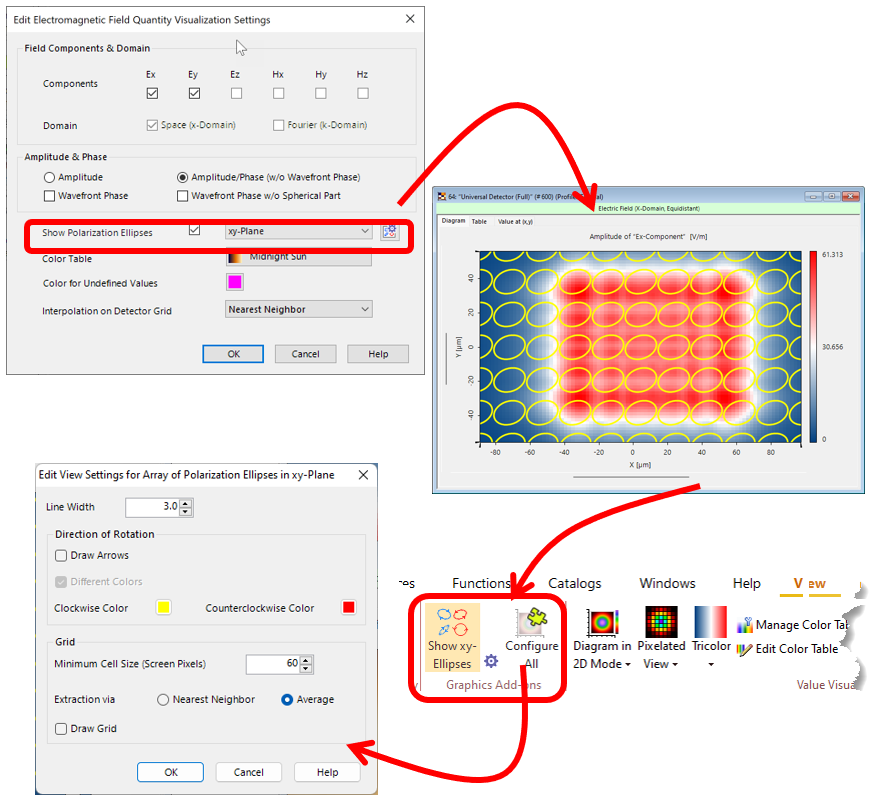 pEcYfj��3M *8,W$pe3�� P]��^OSPRg Graphics Add-ons: 增加了 Point cloud 功能 l9|�K�,YVW {�~�9HJDcM ^ICSh�8C��
pEcYfj��3M *8,W$pe3�� P]��^OSPRg Graphics Add-ons: 增加了 Point cloud 功能 l9|�K�,YVW {�~�9HJDcM ^ICSh�8C�� • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
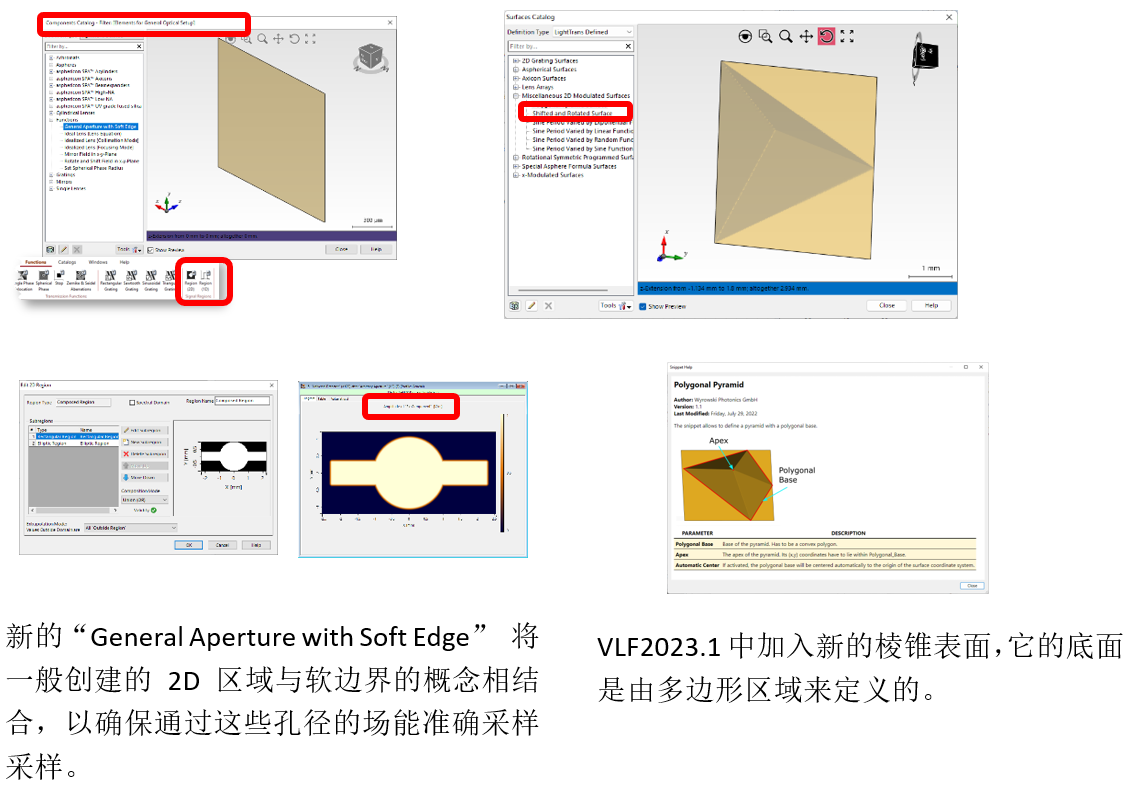
O0'|\:m��y 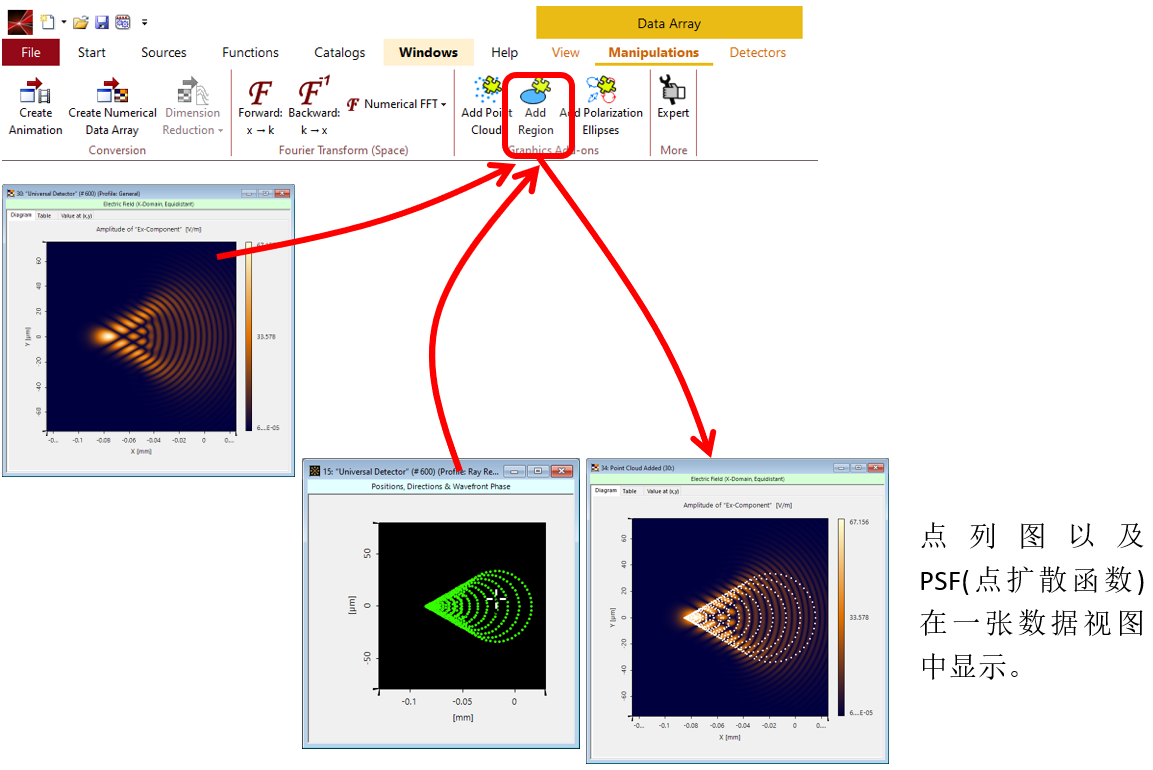 lFtEQ �'�} �7P�(�o!%H VirtualLab中的区域 (Regions) Go ��c*ugR ,h1\PT9ULY p({@t=L3g
lFtEQ �'�} �7P�(�o!%H VirtualLab中的区域 (Regions) Go ��c*ugR ,h1\PT9ULY p({@t=L3g • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
�d�O2?&f� 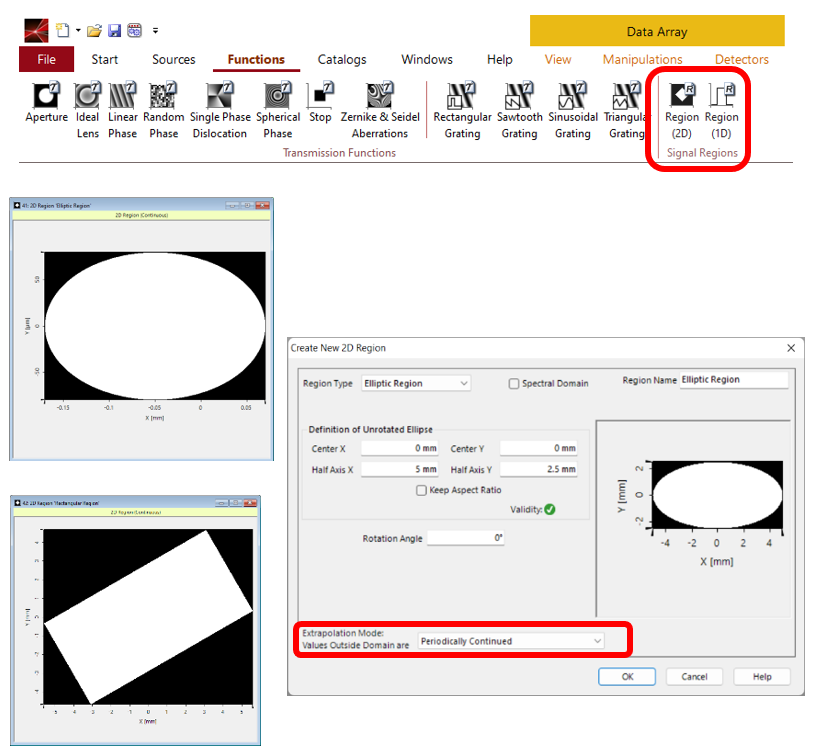 �cA�4?[�F
r3' D�X��P lbt8�S�.fx Graphics Add-ons: 添加区域(Add Region) bs\k�b-\R rz&V���.,s �5��>�%^"f
�cA�4?[�F
r3' D�X��P lbt8�S�.fx Graphics Add-ons: 添加区域(Add Region) bs\k�b-\R rz&V���.,s �5��>�%^"f • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
�M/.M~/�~� 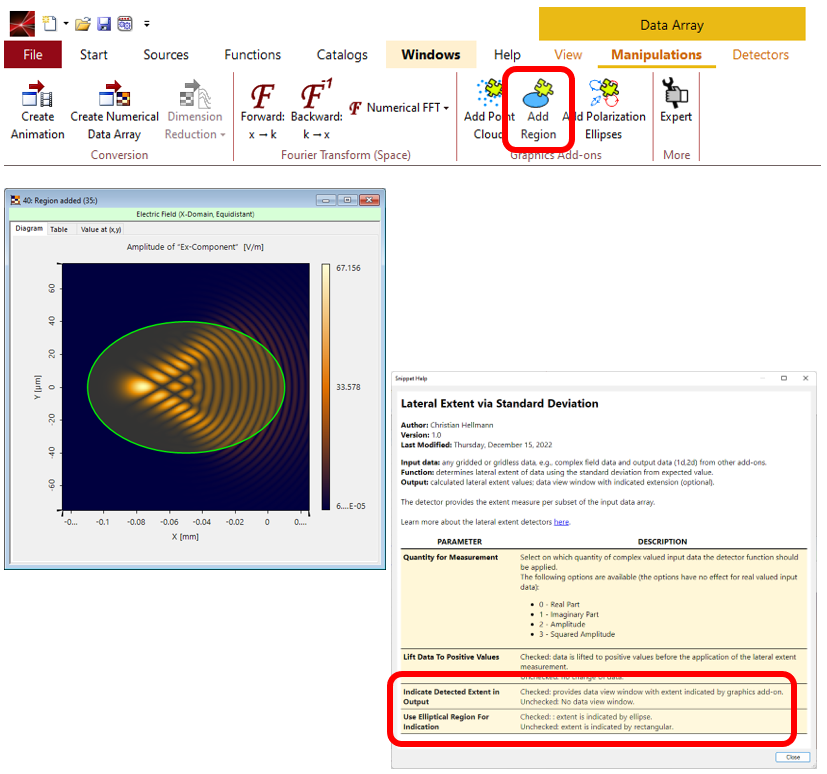 tik*[�1i�t Peph..�8�Z
tik*[�1i�t Peph..�8�Z 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
T5}�3Y3G,6 -E�6av|c,F Graphics Add-ons: 添加区域(Add Region) �]8����}2 u{=h�%d�/� W�s3�z-U>j • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
) q'D9�x�9 nHbi�{,��3 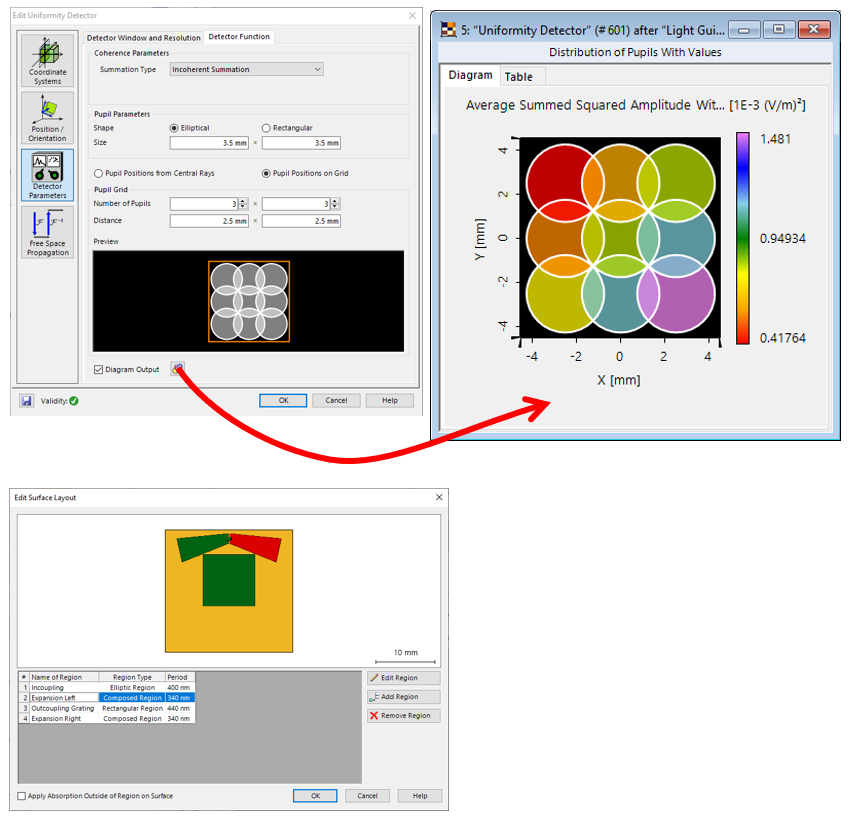 U}X'�R��CM
U}X'�R��CM • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 %Bm{ct�f#) +-�;�v�+{� .?g=mh7�9( • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
"2C}Pr�,p8 • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
�N�VkYm+J# 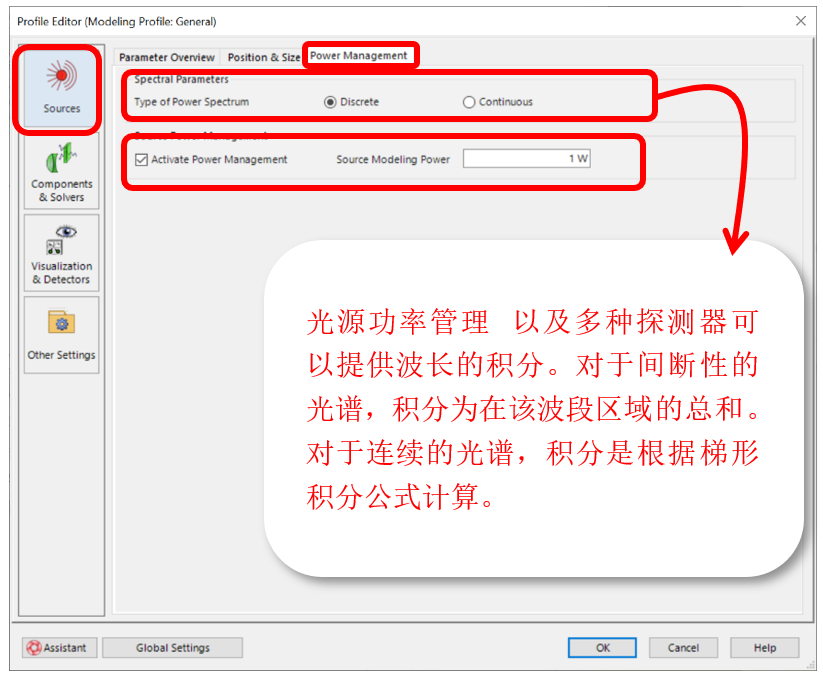 r�MJ�@oc��
r�MJ�@oc�� • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
��gh[q*�%# 1. 针对给定光源参数,进行光源功率的评估。
'q��;MhnU+ 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
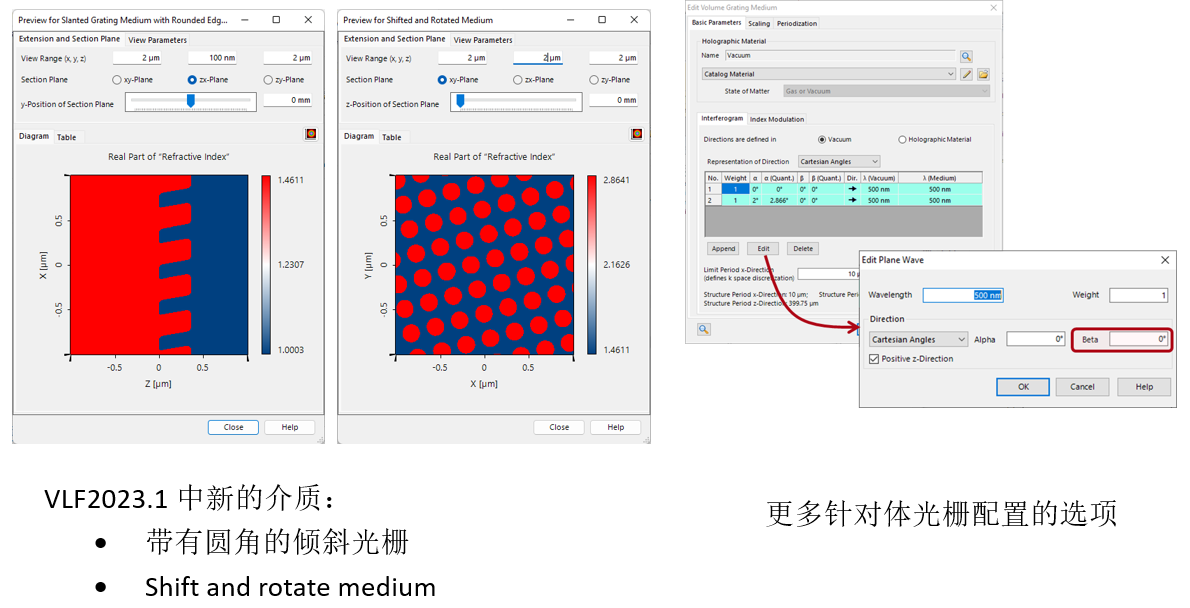
%��KO8�i)n �~���u1~% 组件 |*J;X�<Vm 组件(Component)新的特征 �_�z%\53h� ��H7�4'I}� �0&NM=~��� • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
y~]D�402Cx 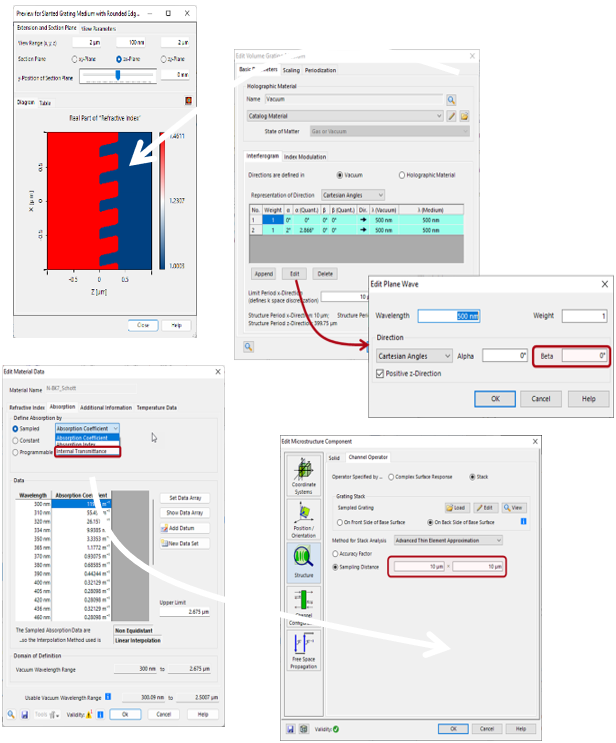 V}�<�<?_�� <7��5x@�!� 组件(Component)新的特征 �X$u�l=iBs
V}�<�<?_�� <7��5x@�!� 组件(Component)新的特征 �X$u�l=iBs
S9�l po_!z
 �@6DKw;�Q�
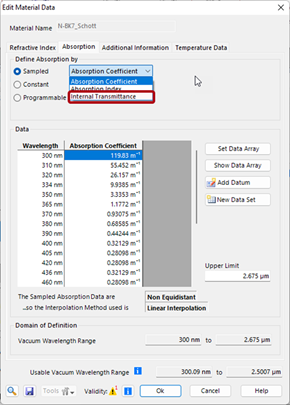
�@6DKw;�Q� 吸收特性可以用采样数据定义吸收率以及透过率。
lrHN6:x(Y4 Ag:�/iB��] 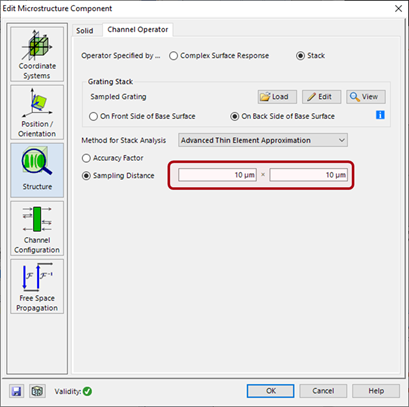 �J|� �&aqY T��;Kv<G;�
�J|� �&aqY T��;Kv<G;� 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
r�T;l#<#VE q�Opwl*?x+ 组件(Component)新的特征 6v:L8�t$"�
)cQ KR4x0^
 !p\�
@�1?� aDz%
%%:r
组件(Component)新的特征 |Q�bCFih�n
!p\�
@�1?� aDz%
%%:r
组件(Component)新的特征 |Q�bCFih�n
�S�`�mB1(h
 R��$�}�Hv� )N^fSenFBn 组件(Component)新的特征 [8tp�U�&J�
R��$�}�Hv� )N^fSenFBn 组件(Component)新的特征 [8tp�U�&J�
lws.;abm%n
 �7�?k3jDK
�U<Xf�O'XJ k
�"7,-0gz
�7�?k3jDK
�U<Xf�O'XJ k
�"7,-0gz 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
j�3w~2q"r� 处理日志 %C��Qa8<q nw*�a?$S�3 扩充版的处理日志 q2B'��R� � kd&�~_=Q� t�`}=~/#`X • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
K�(�MZ!�>{ 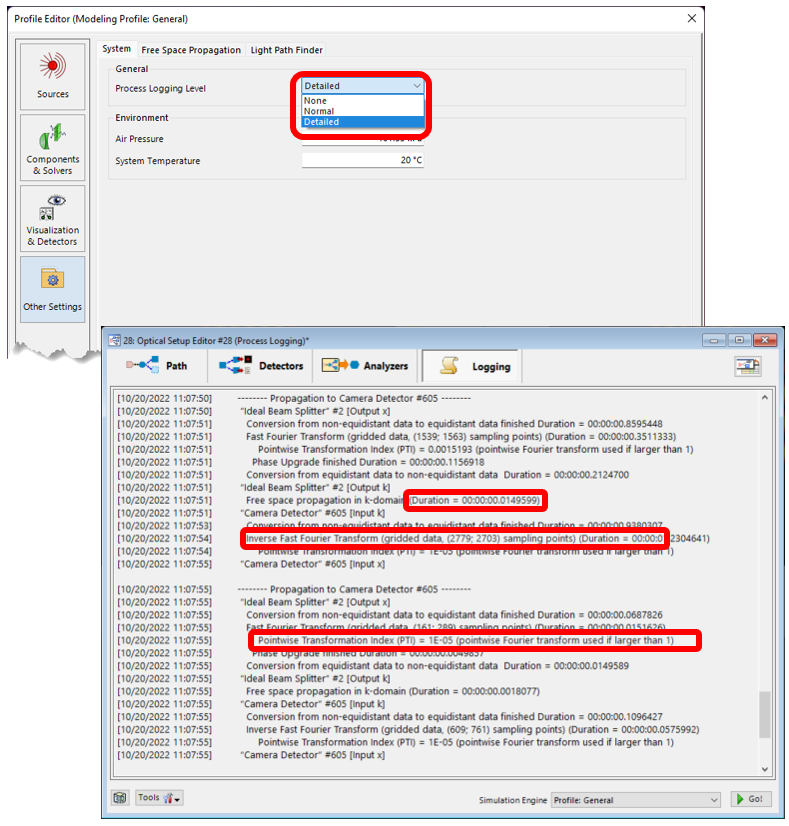 2�|e�xY>`w ��L28wT)D- 系统仿真分析 v%`�k*n�': !F6rcD�K�I
2�|e�xY>`w ��L28wT)D- 系统仿真分析 v%`�k*n�': !F6rcD�K�I • 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
&u"m�Fwe�S 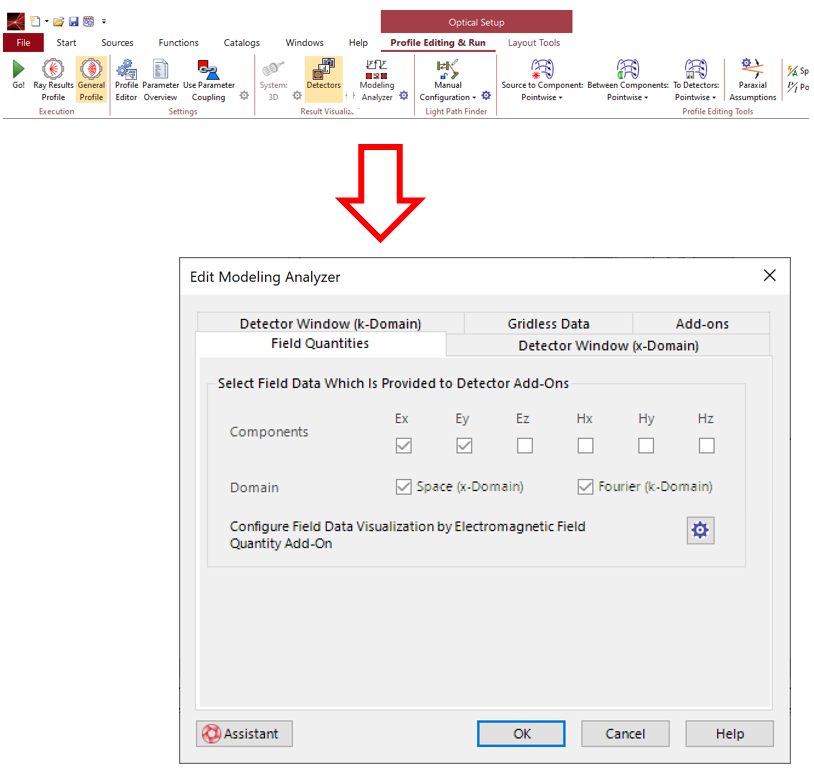 F���@t\D? �I���YptNR 专家模式(Expert Modus) �Wkb>JnP�o $i�8oL�SRV 专家模式中的数据阵列’Manipulations’ Z��g��= �{ HWou&<E�K� P%[��{ �'u
F���@t\D? �I���YptNR 专家模式(Expert Modus) �Wkb>JnP�o $i�8oL�SRV 专家模式中的数据阵列’Manipulations’ Z��g��= �{ HWou&<E�K� P%[��{ �'u • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
;/�23CFYM 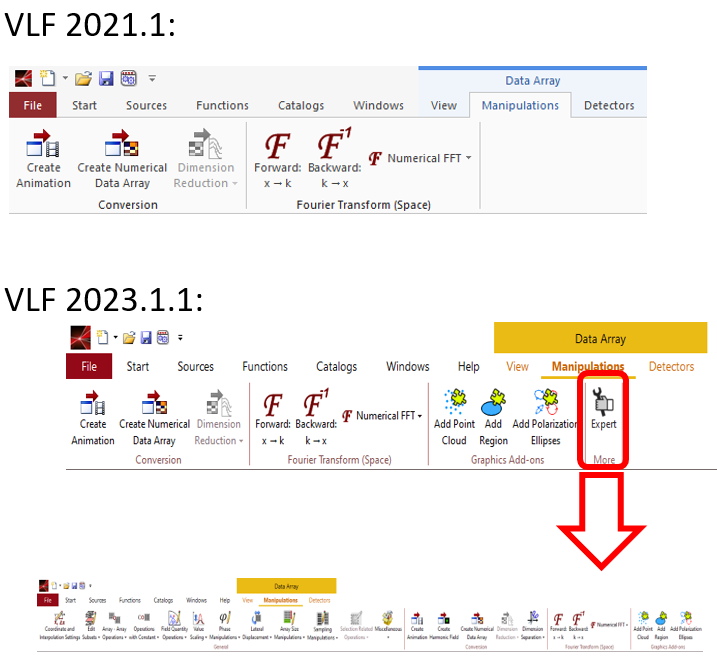 �_8`S&[E�? �Qd3p�pJn� 微小的改进帮助:新的计算器 rwwyYIlE�g ��.gR�b'� ="@f~����~
�_8`S&[E�? �Qd3p�pJn� 微小的改进帮助:新的计算器 rwwyYIlE�g ��.gR�b'� ="@f~����~ • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
H,/�=<Th;i 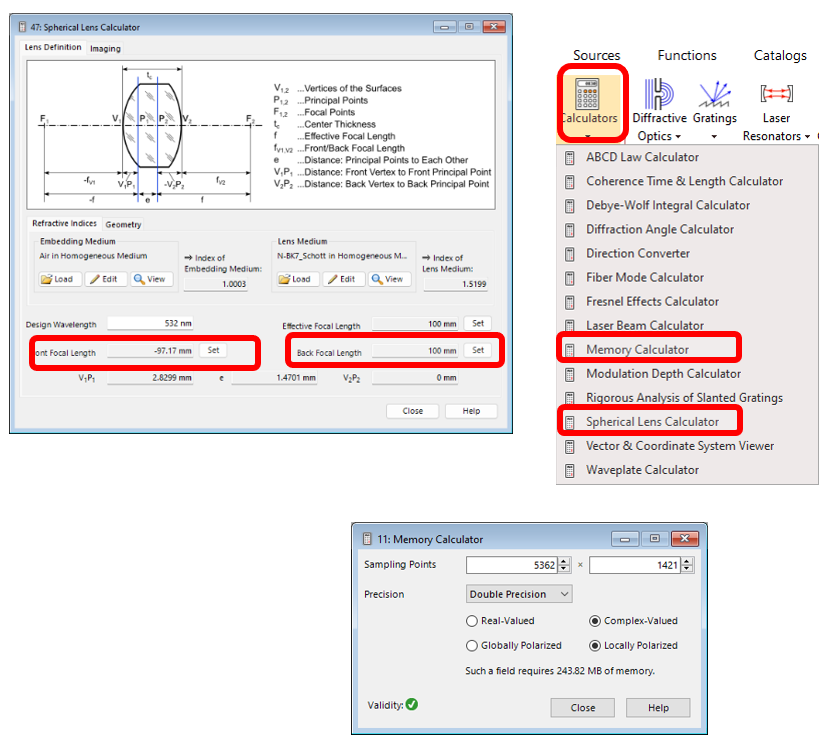 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



