2022 年 12 月,发布 VirtualLab Fusion 2023.1 M�Pn
6sf9M VirtualLab Fusion 2023新版本更新内容(三) pE^j�Uxk6 2023.1版本新特性一览 U#�7moS'�r !,I530�eh7 基本信息 Q9\6P�n ]T
:epjJ1m�W
 ��zRz7*o&l
��zRz7*o&l  �RfZZ�qe�U
�RfZZ�qe�U VirtualLab Fusion 2023.1新版本
主要更新方向 �M�e.t�_)�
 #n�z�VgV�]
#n�z�VgV�]
VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模 �f�f1E��m.
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供: U,Duq^l~�s
- 更快的速度 ,pg�\5���b
- 更容易使用 +RuPfw�{�z
- 融合更多物理光学模型 G T3wJQ5N�
- 更高的透明度 R��H�"�&B`
- 多元的仿真控制选择 �.t7�mTpi�
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。 �=$^�<@-�;
{e3Xm�VA�I
��[^J2<\<0
功能概述(以下为更新内容的详细解释和案例展示): V*|#j�0}�b
数据视图 }�+" N
'��
gLH#�Uwf�J VLF 2023.1数据视图 �fFBD�5q(n ]rh�xB4*�1 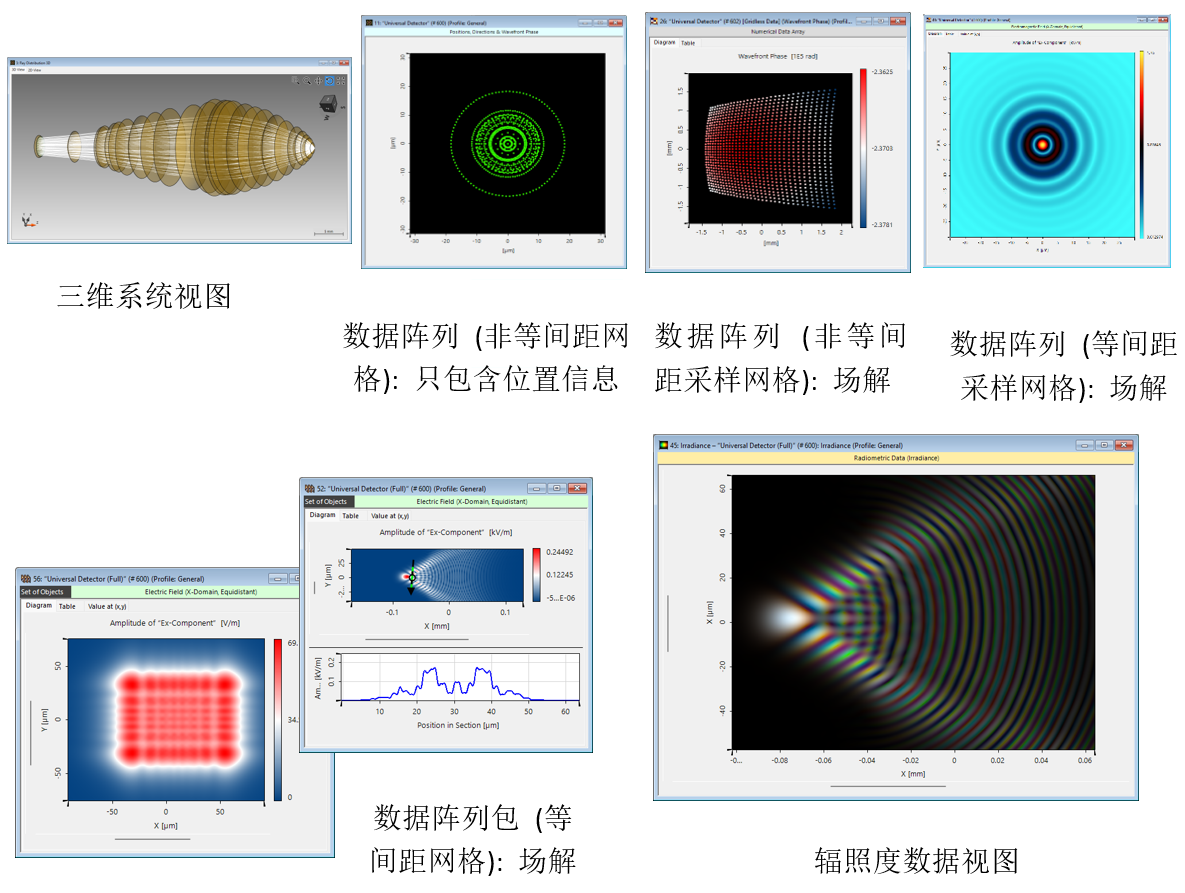 >�`@��c9
m ��s*��XwU� VirtualLab Fusion 2023.1数据查看方式 l$:.bwX�XO
>�`@��c9
m ��s*��XwU� VirtualLab Fusion 2023.1数据查看方式 l$:.bwX�XO
Wb|xEwq�d`
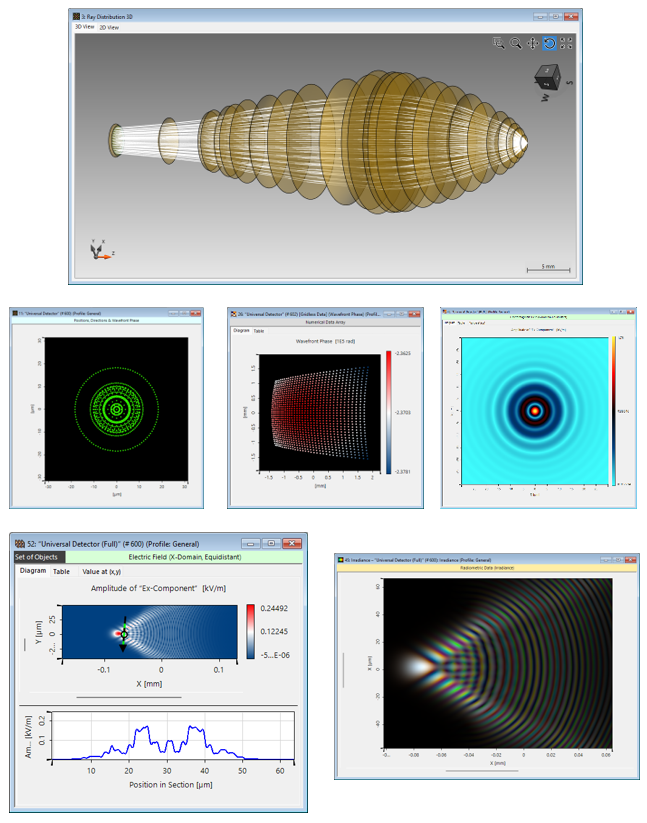 Rz��olue 8 Ga�%x(1U[& 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 |PI]v`[�� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 /{j"����) 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 [T5�z}!�_y 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 RgPY,\_�9+ 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 s[ CnJZ\�q
Rz��olue 8 Ga�%x(1U[& 光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。 |PI]v`[�� 三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。 /{j"����) 数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。 [T5�z}!�_y 多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。 RgPY,\_�9+ 辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。 s[ CnJZ\�q
@�e��Q�o�
yD0�,q%B`}
三维系统视图: 新的对话框以及设置选项 �S!u�`V3-s
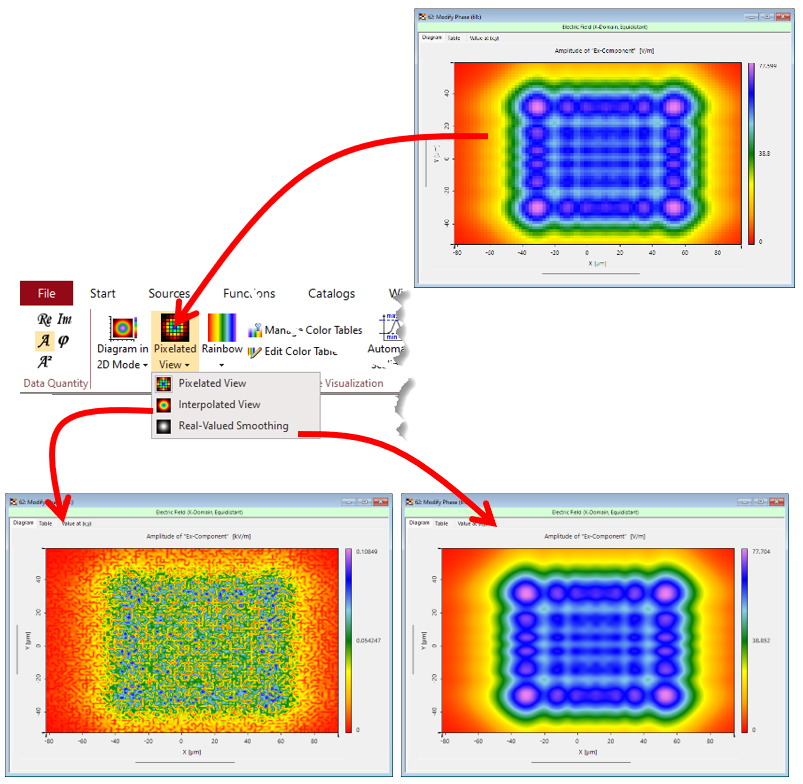
'A|O�V�y�H 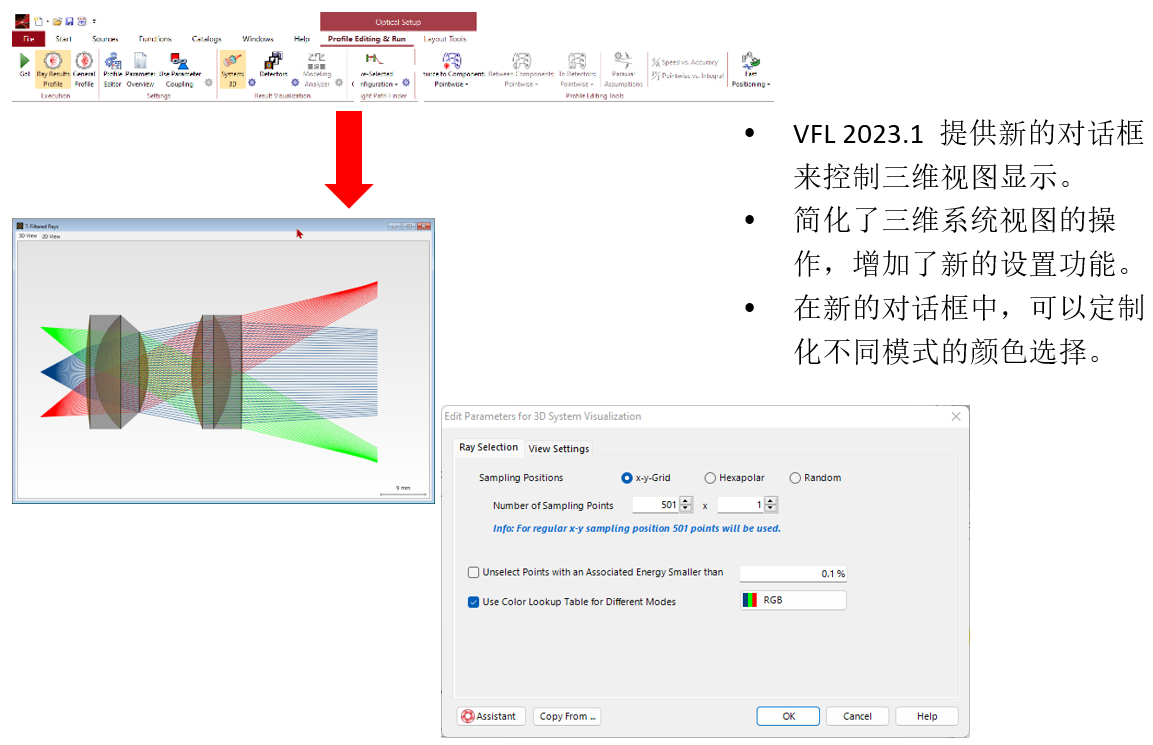 yXp�U�)|o� �`��D�#��3 数据阵列视图: 像素数据(Pixelated Data)平滑 :=0XT`i�Y� T{L{<�+9�% • 探测器中的像素越少,探测器评估速度更快。 5_d=~whO&2 • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 2��K��8�?S • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 l���F=l|.c 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �8o�l�R�#>
yXp�U�)|o� �`��D�#��3 数据阵列视图: 像素数据(Pixelated Data)平滑 :=0XT`i�Y� T{L{<�+9�% • 探测器中的像素越少,探测器评估速度更快。 5_d=~whO&2 • 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 2��K��8�?S • VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。 l���F=l|.c 案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。 �8o�l�R�#>
+>F #�{b
 L���POZA�`
L���POZA�`
}����-���e
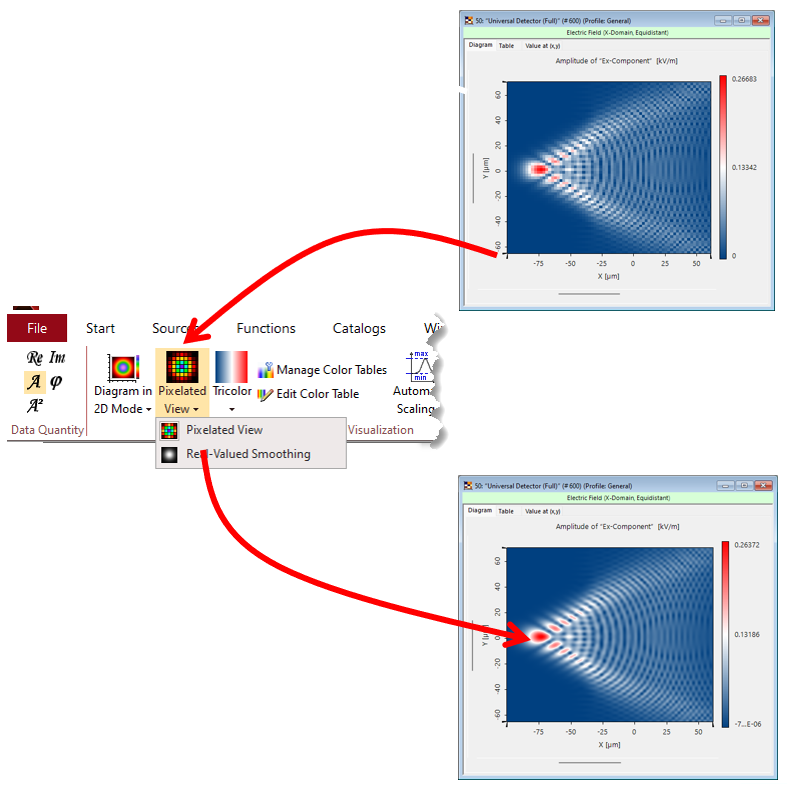
数据阵列视图: 像素数据(Pixelated Data)光滑化 HfF4�BQxm�
kRyt|ryW�h
y���[�}�O(
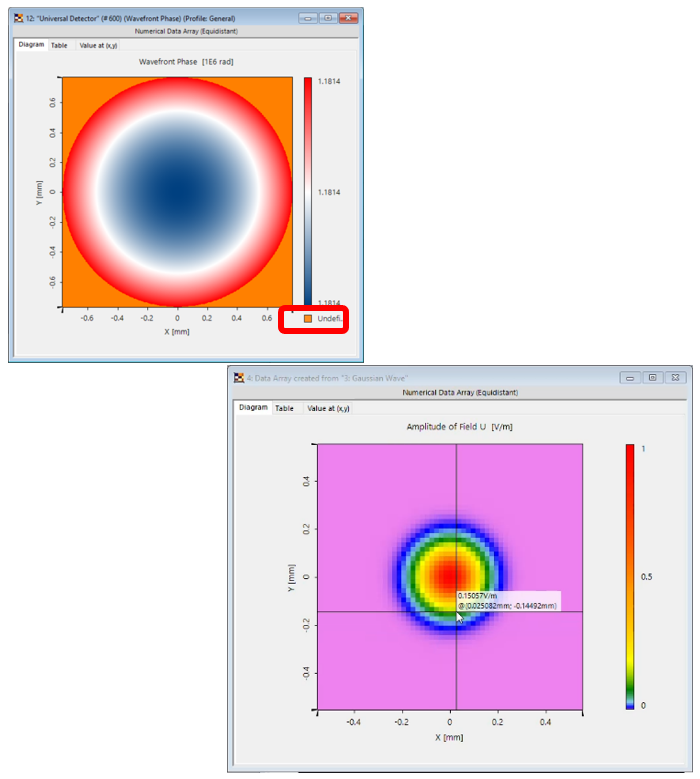
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。 Ix"�hl0�Kh
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。 �CkJU�5��D
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。 NW$C�1(o�T
%/�^k�r ZD
 D-/aS5wM�
D-/aS5wM�
���6Wos6_�
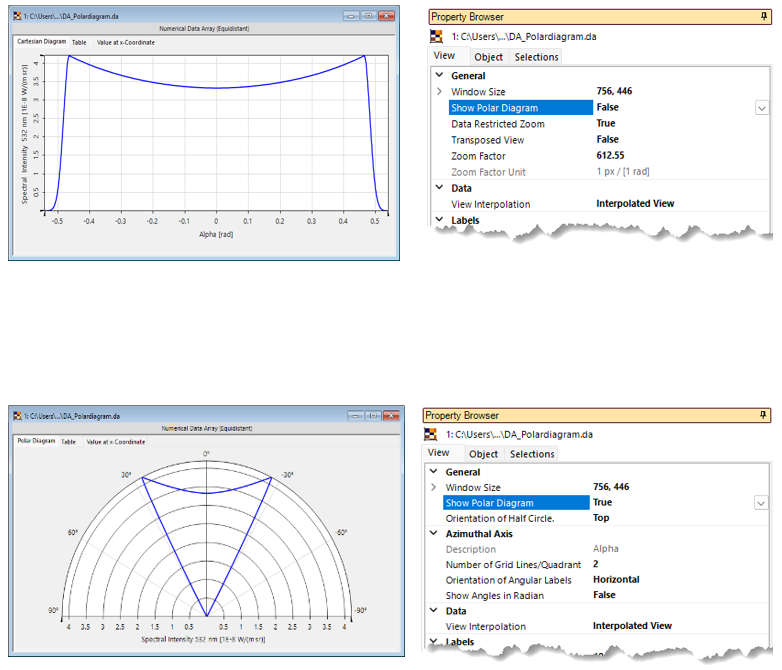
数据阵列视图: 极坐标图(Plolar Diagram) &.��\|�w��
$S"QyAH~-a • 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。 ��X@�ljZ� • VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。 'm;M+:l�
6 • 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。 +dkb�t%�7M • 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。 A�5lP%&tu(
B>^5h?(lt�
 cI5*`LML�1
cI5*`LML�1
j'?^��<4�i
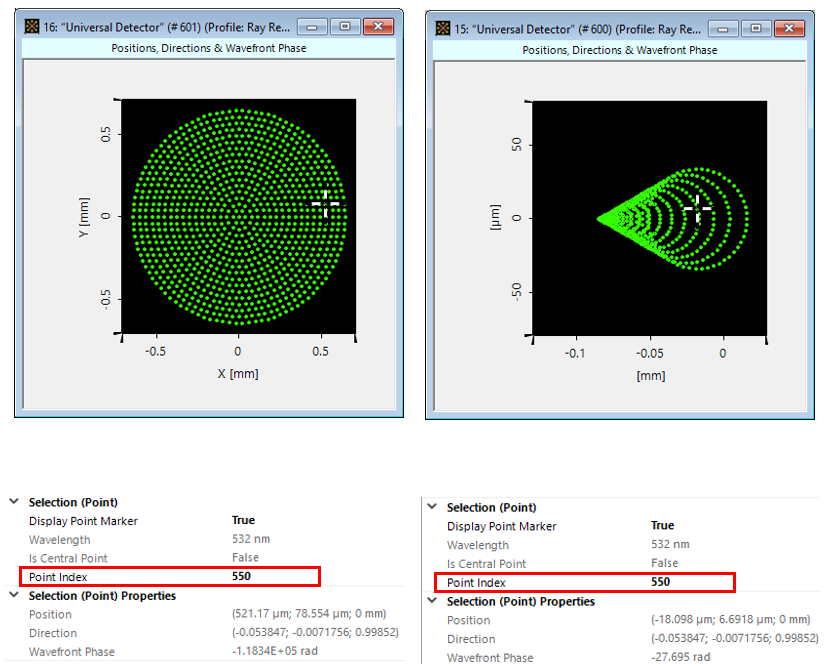
数据阵列视图:找寻以及点的标识 yxECK&&P0#
+3c!.]� o;
!`B�K�%m\8
• 针对逐点操作,可以实现挑选特定点来追踪其映射。 p�earf�2F�
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。 tGKI�J`w*h
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。 x�r2ew%&o�
u#+p�6%�?k
 KA��R XC,z
KA��R XC,z
!
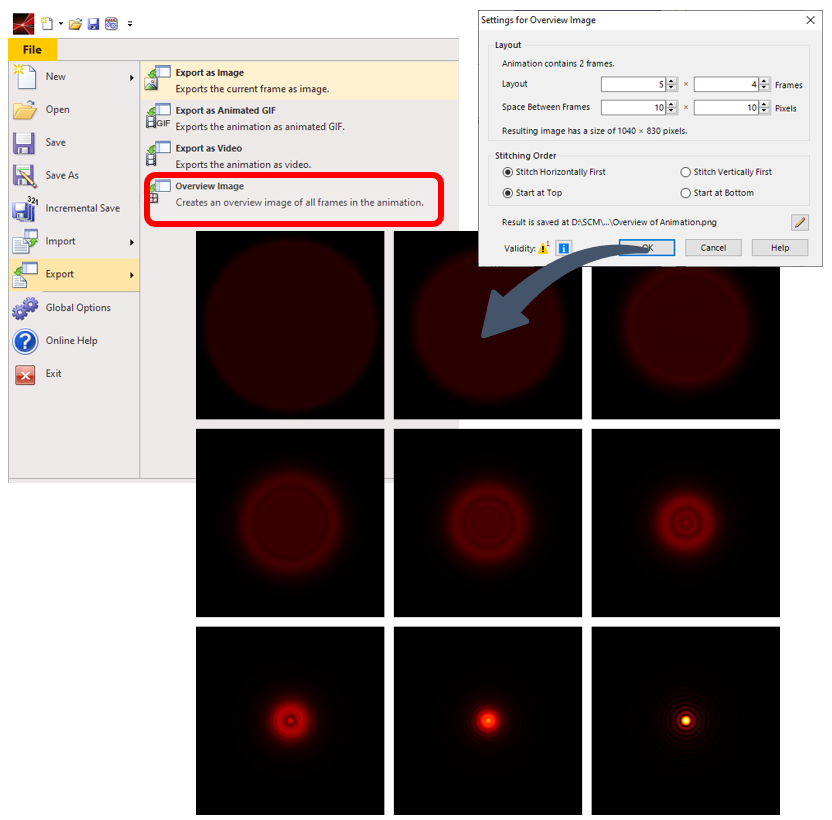
� �Z�� e 导出图像的概览 L�Np�%�]*h ���,tE�v�z ��[_�3Rhp:
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。 [\h�k_�(}�
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。 qM`X�F32A$
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。 n��0X_�m@� "EoC�7
��1
 5(/� 5$u �
5(/� 5$u �
oCLs"L-r{�
数据阵列视图: 更多的新功能 �@1��7hB h
��AUloP?24
CS 7"mE`{�
• VFL2023.1可以对未定义区域填充不同的颜色。 q\q�V~�G�`
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。 u_al�n[oIv
�Y$^x.^dT,
 �{__Z\D2I
�{__Z\D2I
-�R!qDA�"�
Graphics Add-ons提供更多数据视图选择 �W|U!k�qU� #5?Q{ORN o :<%q9)aPf`
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。 5�zlgmCGow
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。 S��x,�O��)
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。 �Lw�=.��LN �i��<g|+}I 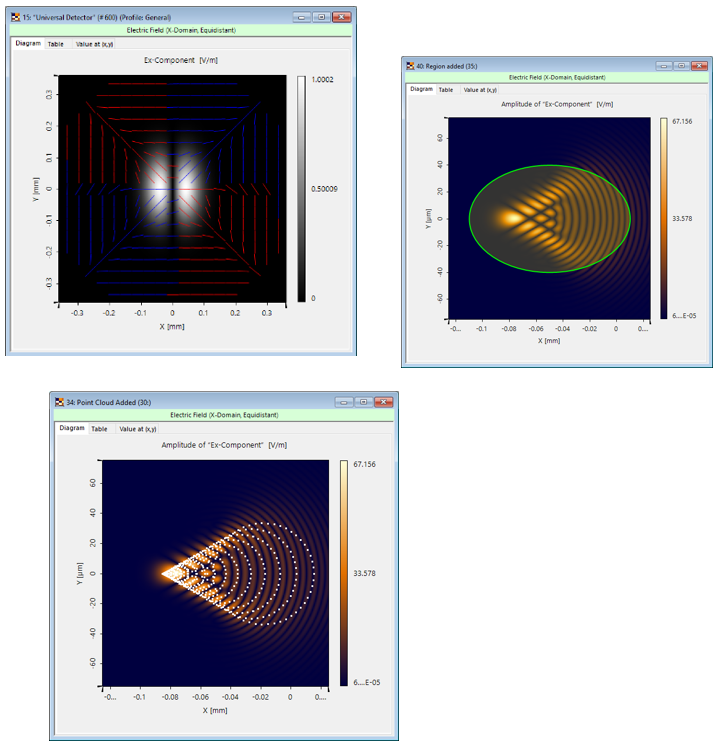 ^n�@.��� )��x�.}B4z w;.�'>O�RC Graphics Add-ons提供更多视图选择 }b�9�#�.H9 ]MkZ1~��f7
^n�@.��� )��x�.}B4z w;.�'>O�RC Graphics Add-ons提供更多视图选择 }b�9�#�.H9 ]MkZ1~��f7 • VLF2023.1 增加了新的图像组件概念,可以提在通用探测器添加偏振椭圆,然后显示输出。
u7�u8c�VF� • 一旦偏振椭圆添加到数据视图中,可以通过视图(View)功能区进一步设置。
/EU�v=89{! • 图像组件提供了多样化的配置选项。
29"eu#-Q�j s,TKC67.%+ 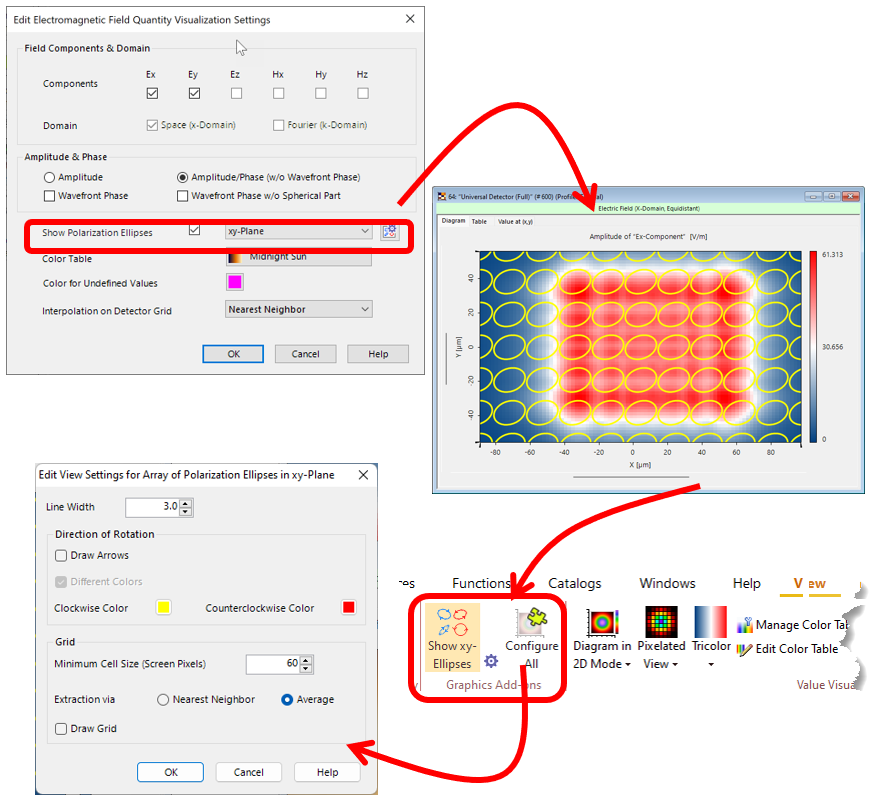 XA~Rn>7�&H PUB|XgQDY: �(o_fY�. Graphics Add-ons: 增加了 Point cloud 功能 pRtxyL��"y NyD�[�9�R? N\<RQ��tDg
XA~Rn>7�&H PUB|XgQDY: �(o_fY�. Graphics Add-ons: 增加了 Point cloud 功能 pRtxyL��"y NyD�[�9�R? N\<RQ��tDg • VirtualLab中可以在物理以及几何模型的无缝转换。这样,设置不同的仿真模式,可提供不同的数据样式。• VLF2023.1使用 图像组件的概念可以组合不同的输出结果。
a�1p:~;f}[ 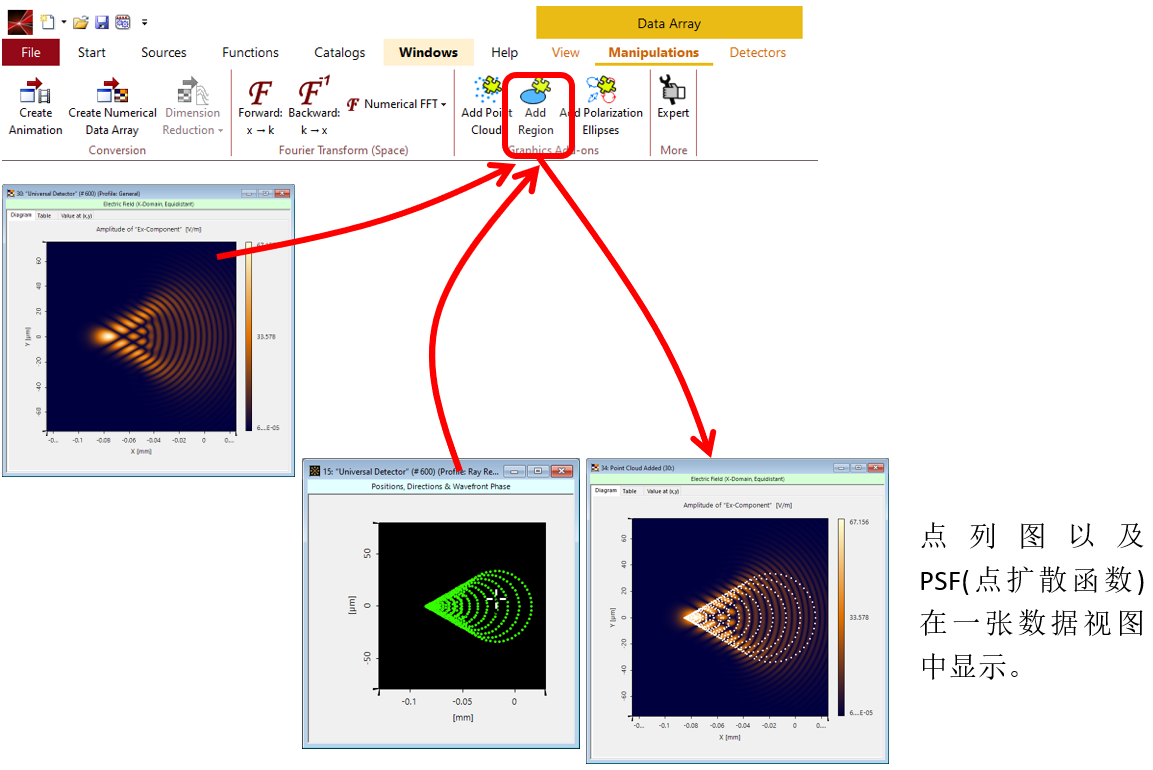 iTU��8WWY< /&=��E=S6� VirtualLab中的区域 (Regions) �� Z*d8b� �,\;;1Kq�� �(Rvke�!"B
iTU��8WWY< /&=��E=S6� VirtualLab中的区域 (Regions) �� Z*d8b� �,\;;1Kq�� �(Rvke�!"B • 区域(Regions)用在VirtualLab软件中,有时会被用在衍射
光学设计中去定义信号窗口。• VLF2023.1我们开始把Region概念用在许多的场景中。• 区域 (Regions) 明确了了可以执行特定操作的一维或者二维区域。比如在该区域需要探测器评估或者定义一个光栅。• 我们逐步扩展该概念在新版中的应用,VLF2023.1增加了周期化区域扩展。
F�z���k�� 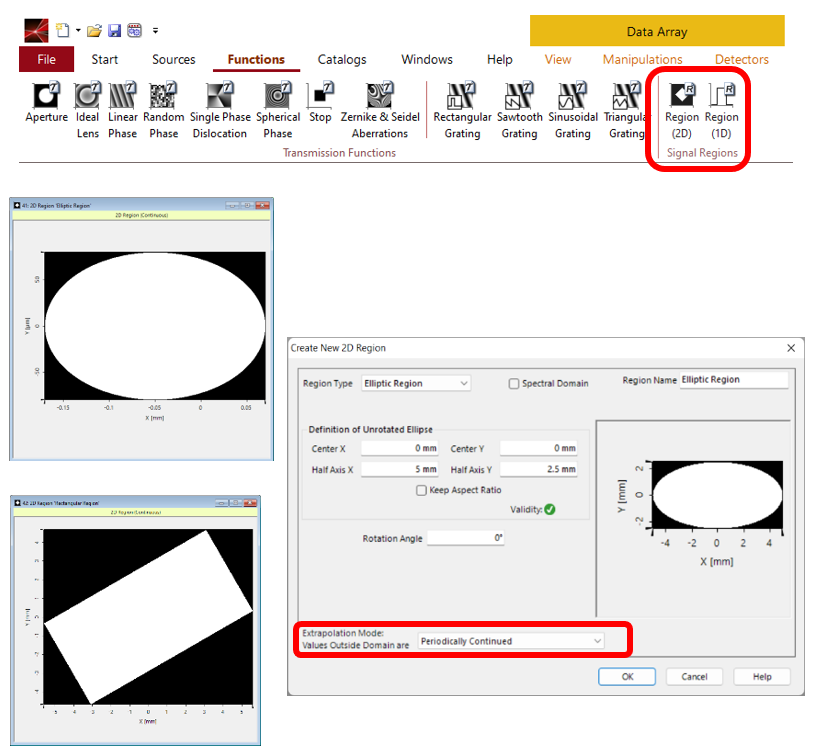 �07"�dU�
�UXvk5��t1 ���bz_Z��k Graphics Add-ons: 添加区域(Add Region) d"+z�Dc;�� B]< 6�\Z?= X���75�>C<
�07"�dU�
�UXvk5��t1 ���bz_Z��k Graphics Add-ons: 添加区域(Add Region) d"+z�Dc;�� B]< 6�\Z?= X���75�>C< • 区域(Regions) 定义几何物体,通过图像组件功能, 可以添加到数据阵列中。• VLF2023.1直接通过点击Manipulation 按钮,即可找到该功能。
{
p {a0*$5 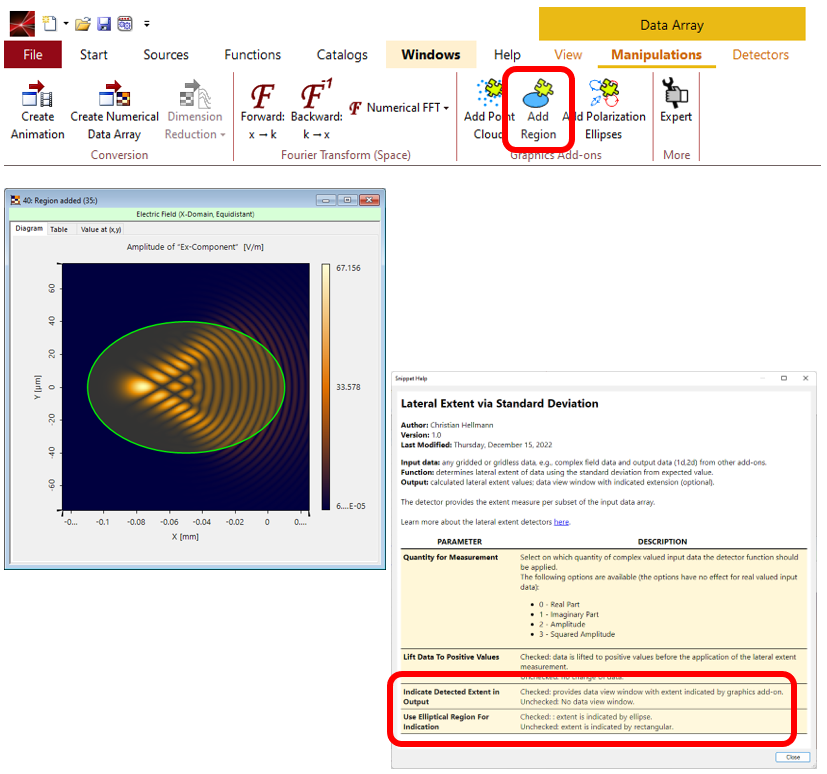 �*Le��FI%� (�Q !4\�Gy
�*Le��FI%� (�Q !4\�Gy 该概念可以用在通用探测器上的组件功能中,例如,显示一个测量范围。
;Yx�Qo
o�> >�_�U�)=�q Graphics Add-ons: 添加区域(Add Region) 88}c+�V+N! ;$@7i���L n.C.th
>Y1 • VirtualLab中 Light Guide Toolbox 提供了强大的AR/ VR的仿真功能。• 我们在不断稳步
优化设计工具。
wK�hu�UZj{ m�~9Qx`fi` 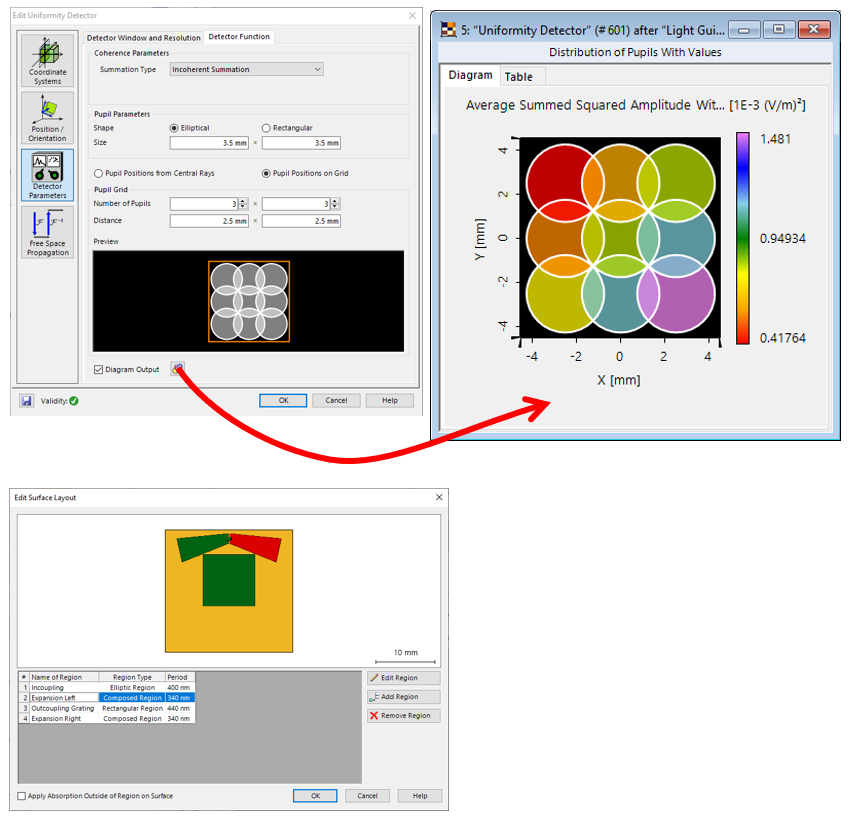 #Nx�k3He]8
#Nx�k3He]8 • VLF2023.1增加了新的特别的视图功能:• 在光波导之后区域探测可视化(请见 通用探测器器–图像组件的使用)。• 直接可视化出瞳处光的均匀性。• 改进了光波导中光栅区域布局的交互式预览,以便更快地访问并设置区域和光栅参数。
光源功率管理 �$]4^ENkI� 1oai�A�/bq vm)&��WEL! • VFL2023.1中增加了辐照度以及光度探测功能,所以需要光源功率管理模块。
�p�5^,3�&� • 对此,VLF2023.1提供了一个光源功率管理模块。用户可以在‘Sources’ 中的 ‘Profile Editor’ 进行编辑。
*L�8Pj`zR� 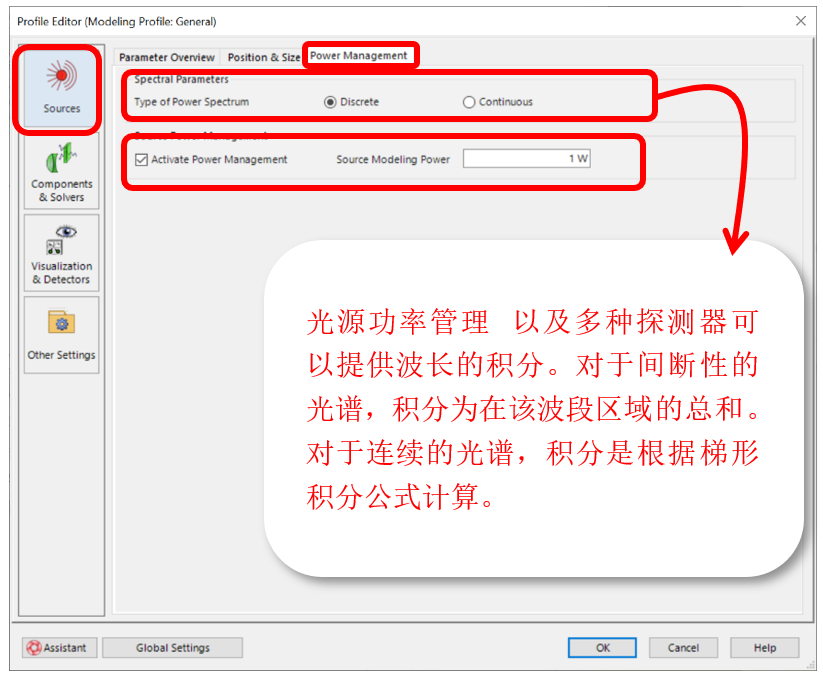 �y3$�i?}?A
�y3$�i?}?A • 激活光功率管理以及设定光源功率,在VLF2023.1中可以实现:
�M#on��-[� 1. 针对给定光源参数,进行光源功率的评估。
i���8�I%}8 2. 在传递所有模式通过
光学系统之前,可以放缩光源所有模式中光场的振幅,生成需要的特定光源功率。
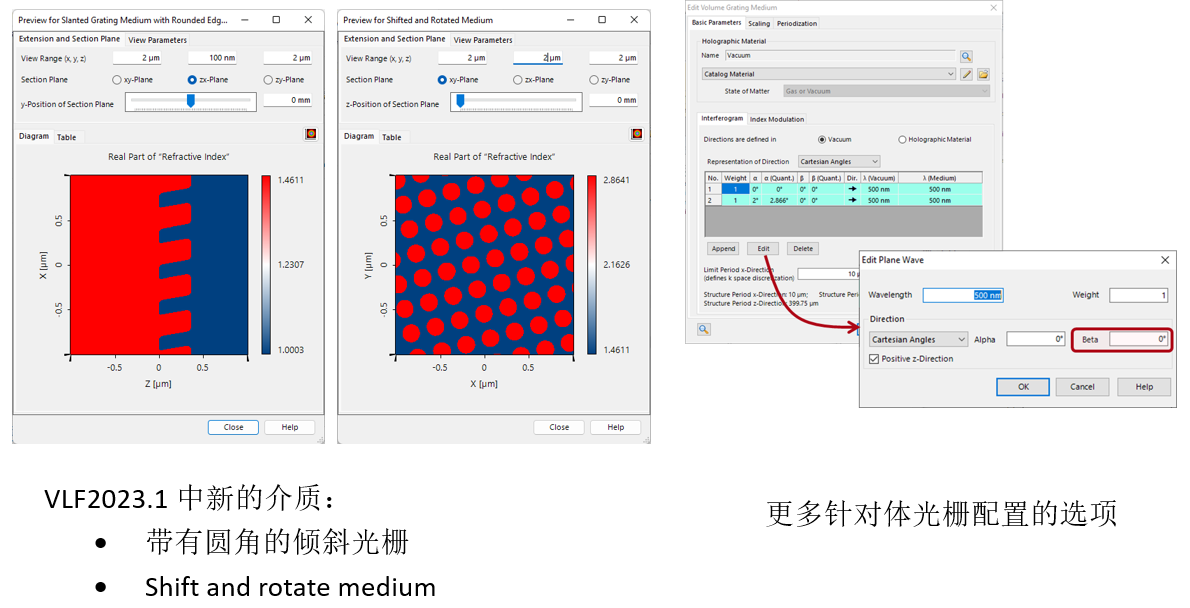
^~0�Mw;n& z��8M^TV�� 组件 D;)Tm|XizW 组件(Component)新的特征 �zF�%CFq�Q goi.'8M|/b �,�#&lNQ'I • VirtualLab Fusion 结合了光源,元件以及探测器去配置光学系统。• 元件是由光学表面,堆栈中的表面结构以及表面间的介质组成。• 介质可以描述任何空间折射率调制,包括折射率调制中的跳跃。• 描述了材料折射率随波长改变的特性。• 元件伴随着一个特定的求解器。• VLF2023.1为元件提供了一些新功能。
,����v�:m� 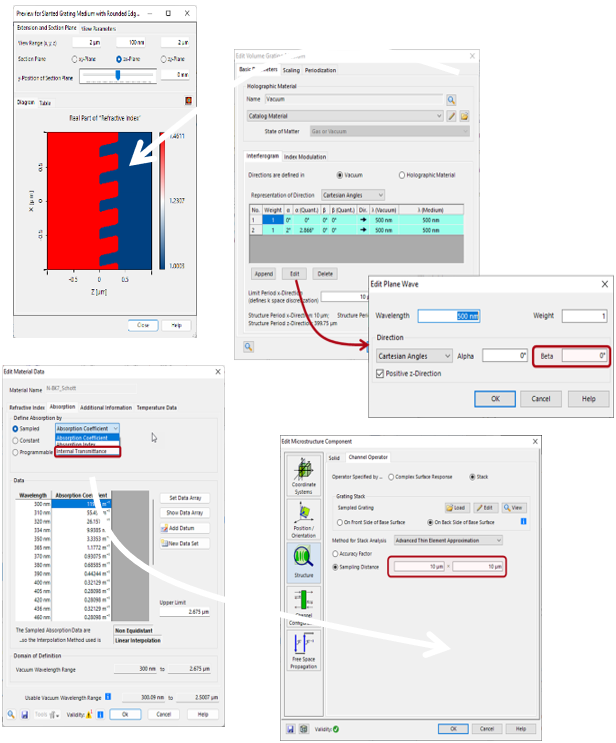 .M�uS"R{y� <3�z]d?u�� 组件(Component)新的特征 �S pDV��D
.M�uS"R{y� <3�z]d?u�� 组件(Component)新的特征 �S pDV��D
!<]%V]5[_
 au2�ieZ�Z[
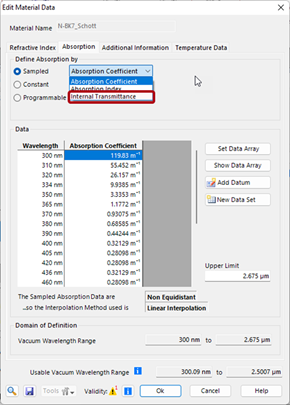
au2�ieZ�Z[ 吸收特性可以用采样数据定义吸收率以及透过率。
T%K(opISc( "�<0B�C�JJ 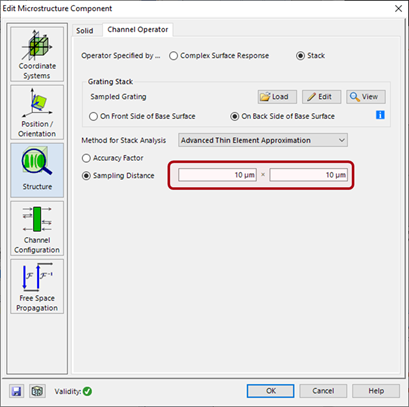 >e*�m8gm#� �
~%_�$e/T
>e*�m8gm#� �
~%_�$e/T 对microstructure component来说,合适的场采样是非常重要的。VLF2023.1 可直接定义采样距离。
?:�Y{c#w�> "K`B'/�08^ 组件(Component)新的特征 �O>��xGH0H
9H�?er_6Yf
 Ix�g.^>62� [o�<R#f`� 组件(Component)新的特征 *�7.!"rb8A
Ix�g.^>62� [o�<R#f`� 组件(Component)新的特征 *�7.!"rb8A
xf<D5 ol�Z
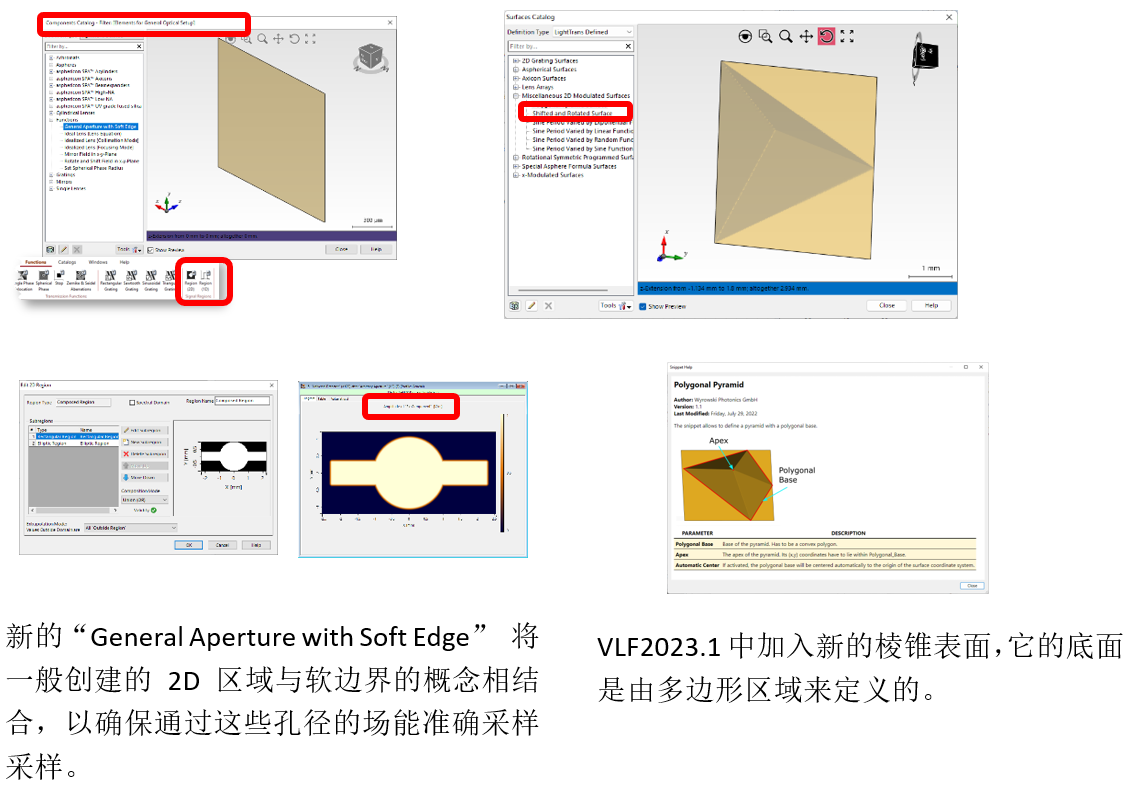
 $�"C]�y$}� e��x7�zg�! 组件(Component)新的特征 �*PE�1)�bF
$�"C]�y$}� e��x7�zg�! 组件(Component)新的特征 �*PE�1)�bF
33|��>u+
 K��gX~P�P> M~�w
=�ZJ@ 2}>jq8Y47
K��gX~P�P> M~�w
=�ZJ@ 2}>jq8Y47 更多类型的Zemax OpticStudio® Lens Files文件可以被导入到VirtualLab中。
,xB&�{�J�� 处理日志 >�>�=l�h�� �,rc5r3�� 扩充版的处理日志 uQWJ��7X�m �l�z@fXaZM @Z~lM5n�$8 • 日志记录在光学模拟和设计中提供了高的透明度。• 日志中包含的模拟步骤越多,也更容易理解仿真的特点以及它的处理过程。• VLF2023.1在日志中加入了更多操作步骤,比如数据转换,有时候模拟时会耗费时间。• 逐点傅里叶变化的自动选择构成VirtualLab Fusion的核心技术。• 我们在VLF 2023.1中引入了一个新的标准,即逐点变换指数(PTI),以判断FFT和PFT算法之间的切换点。日志记录提供了PTI值,以提供最大的灵活性。
��D4<nS<8� 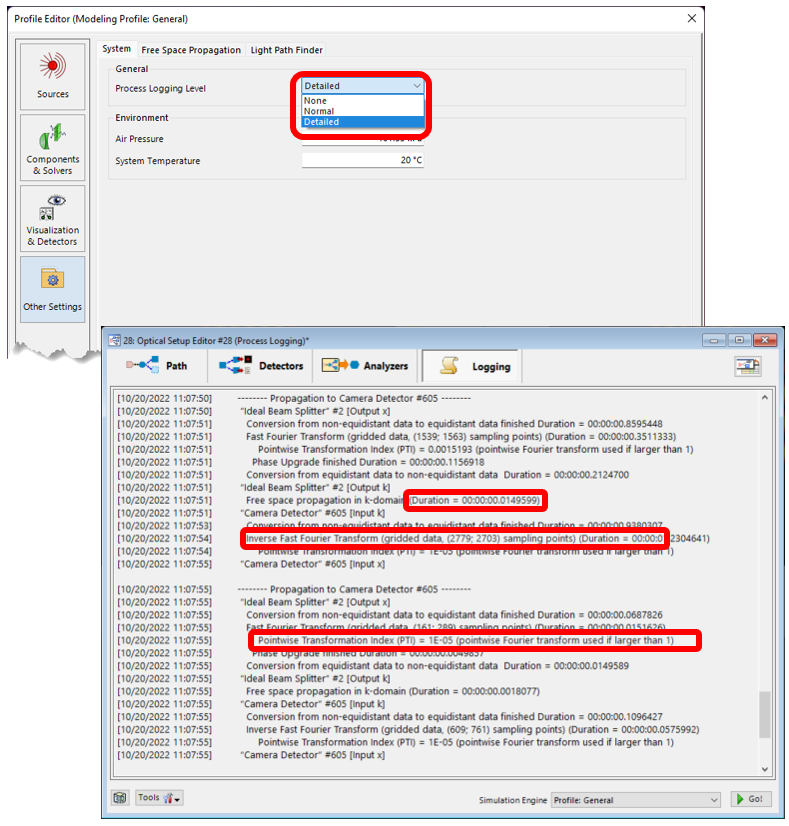 Hv(0<k6�oH R�!�;t�F|] 系统仿真分析 ! �lgsV..R <~t38|Ff@
Hv(0<k6�oH R�!�;t�F|] 系统仿真分析 ! �lgsV..R <~t38|Ff@
• 除了日志记录,系统模拟分析器提供了仿真的步骤,每一步的仿真结果会生成一系列数据阵列。• VLF2023.1 通用探测器用来记录每一步的光场数据,它给出了X(空间域)和K域(频域)的光场。• 根据模型在Profile中的设置,如果没有插值要求,模拟分析器也可以提供非等间距光场数据。
Oga�0CR_�� 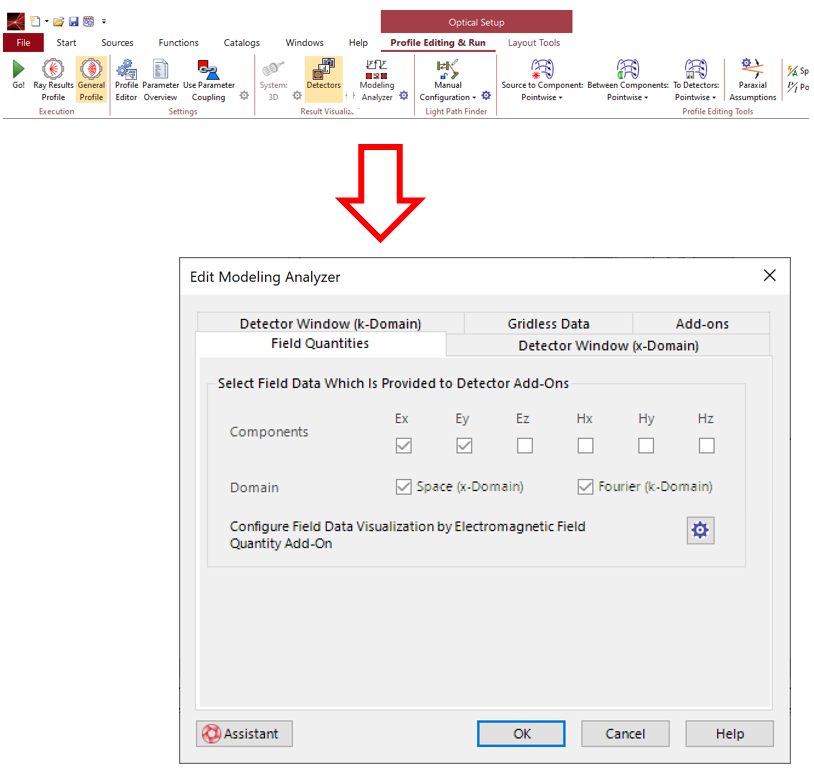 �oL>�m�}�T <",4�O���� 专家模式(Expert Modus) Q�+�)�f��I 6�ND,��4'6 专家模式中的数据阵列’Manipulations’ s/UIo��^m� bKj#HH�y\I k'}}eu/ q
�oL>�m�}�T <",4�O���� 专家模式(Expert Modus) Q�+�)�f��I 6�ND,��4'6 专家模式中的数据阵列’Manipulations’ s/UIo��^m� bKj#HH�y\I k'}}eu/ q • VLF2023.1 改变了功能区可用性的概念。• 取决于数据阵列中数据的类型,在功能区会显示可用项。这可以帮助用户减少无关选项,来对特定的数据只保留最重要的一些选项。• 但是这会限制了对于数据类型的操控。• VLF2023.1 我们给了用户最大限度的数据操控灵活性。最后,VLF2023.1 提供的专家模式提供所有的操控,不会被数据类型局限住。
CFAz�/x@�% 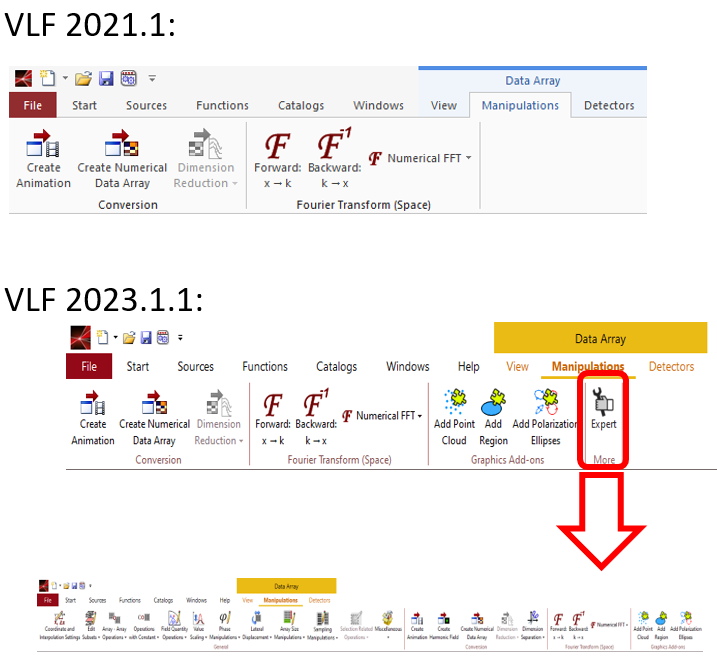 6UR.,*f�=� �1w'iD
�X� 微小的改进帮助:新的计算器 |/C>�xunzz mb~w� .~�% Oyhl�*`-*t
6UR.,*f�=� �1w'iD
�X� 微小的改进帮助:新的计算器 |/C>�xunzz mb~w� .~�% Oyhl�*`-*t • VirtualLab Fusion计算器为用户带来了很多便利。• 我们在最新版本中增加了新的计算器。• VLF2023.1对 Spherical Lens Calculator增加了新功能。• VLF2023增加了Memory Calculator计算器,它根据数据类型以及采样点的数量,可快速了解电脑内存的使用情况。
Cq;t;qN,nQ 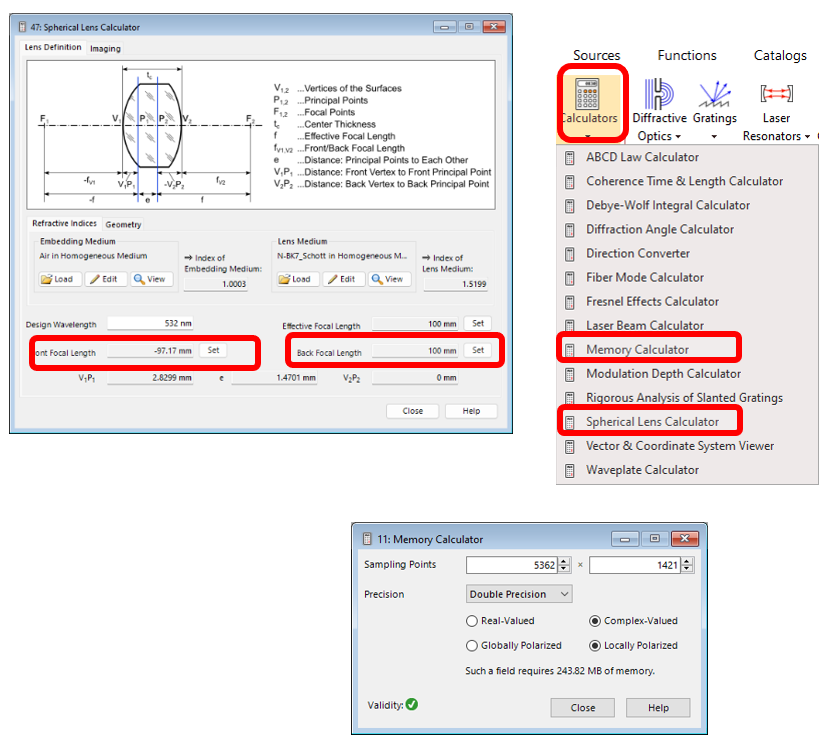 欢迎扫码加微,索取最新2023.1试用版
欢迎扫码加微,索取最新2023.1试用版



