如今,
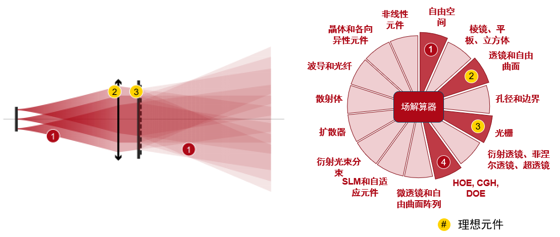
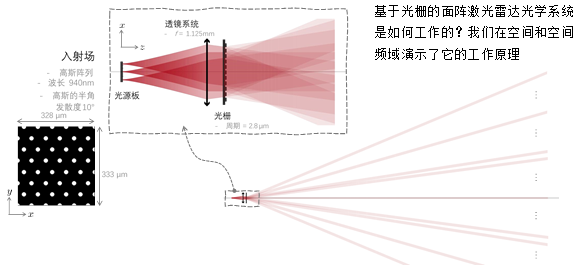
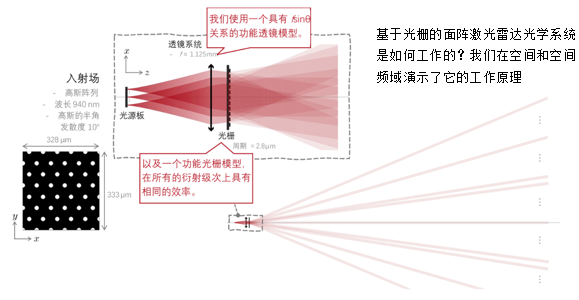
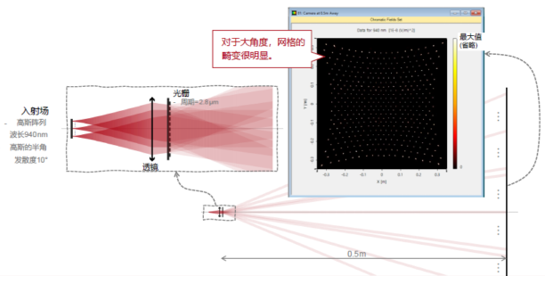
激光雷达技术不仅应用于专业领域,而且应用于消费品领域。以面阵激光雷达为例,由于其快速、准确的三维距离检测和测量能力,在智能设备中得到了广泛的应用。在这个例子中,我们演示了一个典型的面阵激光雷达的工作
原理,该雷达由
光源阵列、准直
透镜系统以及
衍射光栅作为分束器组成。分析在空间和空间频率域中进行。
P ||:?�3IH ��k�)�,�.� 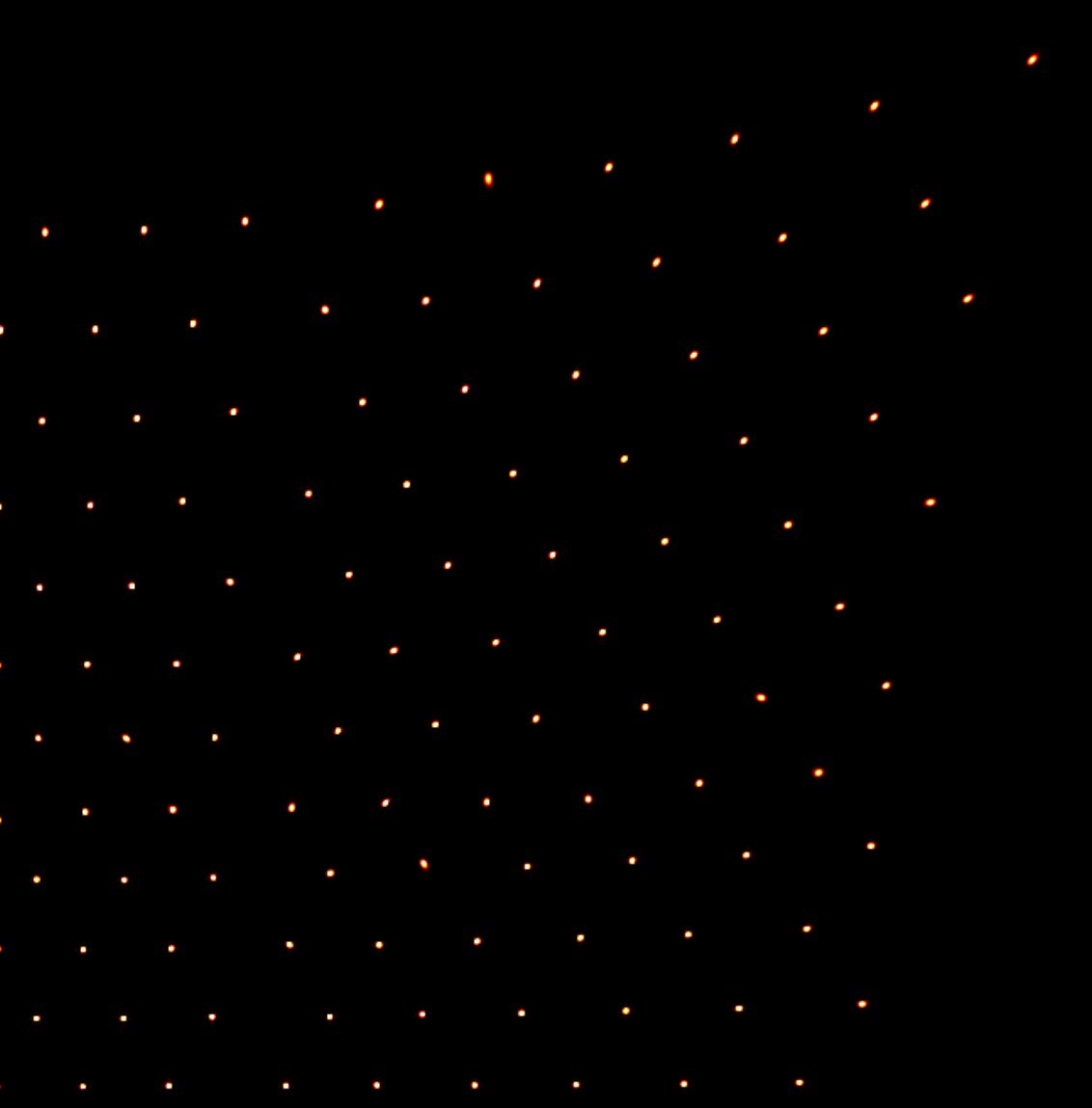 (-U6woB6�o P>3
;M'KsO 建模任务 ��qA6�;Q$�
(-U6woB6�o P>3
;M'KsO 建模任务 ��qA6�;Q$�
Grw|8�xN0t
 aM�|�^t:� Y��C�d[�s[ 建模任务 v5;V$EGD&�
aM�|�^t:� Y��C�d[�s[ 建模任务 v5;V$EGD&�
qK�g*/)sD(
 qx~-(|s`H ?�
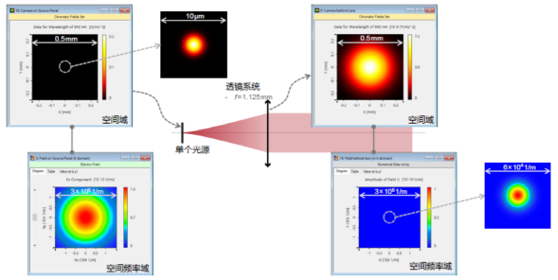
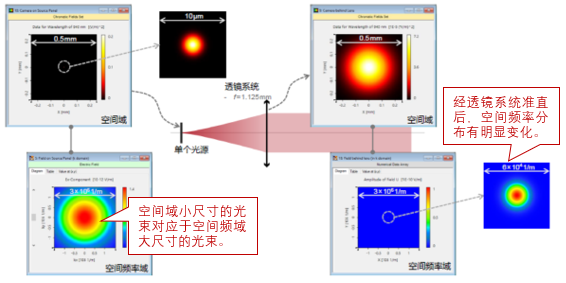
�@�Y'_f 单个光源+准直透镜 X�]OVc<F��
qx~-(|s`H ?�
�@�Y'_f 单个光源+准直透镜 X�]OVc<F��
{�"�uLV{d�
 �Ma,2_oq�+ .v�{ok�,�& 单个光源+准直透镜 ��{FU,om9
�Ma,2_oq�+ .v�{ok�,�& 单个光源+准直透镜 ��{FU,om9
u
6��(�O;�
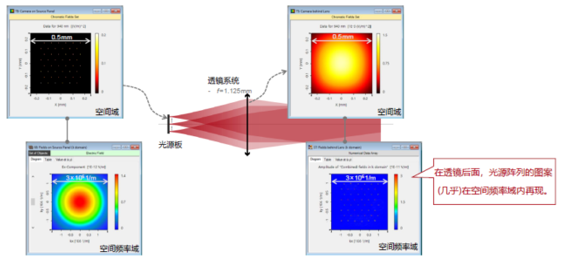
 <,�!e*�V*U �Bqd'2H�Qd 光源阵列+准直透镜 %`[O�z�[�V
<,�!e*�V*U �Bqd'2H�Qd 光源阵列+准直透镜 %`[O�z�[�V
�lU[�" ZFP
 [Q2"O�G�@Q "ebm3t@C� 光源阵列+准直透镜+衍射光栅 "Ngf��dL�z
[Q2"O�G�@Q "ebm3t@C� 光源阵列+准直透镜+衍射光栅 "Ngf��dL�z
Io8�1�z�A�
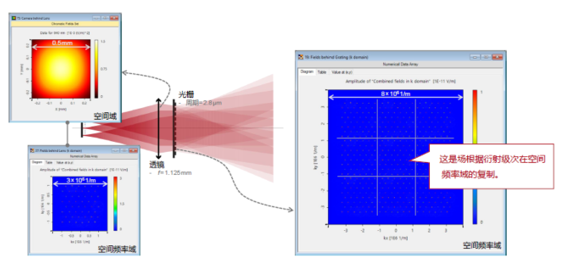 xQ�=sZv�^M rv�\m0*\�< 光源阵列+准直透镜+衍射光栅 z�_�^�Vgb]
xQ�=sZv�^M rv�\m0*\�< 光源阵列+准直透镜+衍射光栅 z�_�^�Vgb]
[Gr�d?�mc#
 aI��l}�|n" 5�QR=$?��K 仿真设置注意事项 TU��Q�+?[
aI��l}�|n" 5�QR=$?��K 仿真设置注意事项 TU��Q�+?[ 光源阵列的建模
"V�g1'd�}f - 光路中只有一个高斯光源,利用可编程
参数运行实现光源阵列。
dC7YVs_�,# - 在参数运行中定义网格,每次高斯光源横向移动到一个网格点上。 k域的可视化
1�webk;�IM - 电磁场
探测器可以选择将k域即空间频率域的场显示为单个文档。
�\Y�0o~JD - 为了将所有结果组合起来并显示在一个公共窗口中,本例设计并提供了一个VirtualLab模块。
`H.~��#��$ (附录-组合电磁场模块.cs)
J7`fve��� .BR2pf|�R� 走进VirtualLab Fusion W�z~=JvRHh �\�L"Vx9xT 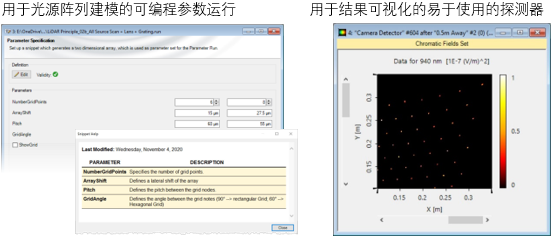 %)$�^_4.g� .m&JRzzV
/7
C�F f&4 VirtualLab Fusion的工作流程 �V �kA$�T8
%)$�^_4.g� .m&JRzzV
/7
C�F f&4 VirtualLab Fusion的工作流程 �V �kA$�T8 通过参数运行进行光源阵列建模
2L<iIBSJwm Sd�!!1a��s �h2�SVDK�j 正确地设置傅里叶变换
_bi]Bp�xf McRAy%�{�z [<+A?���M= 设置功能光栅元件
(|<e4�HfZL 3~I|�KF�7x ��,dTR�M�� s\k��4<d5 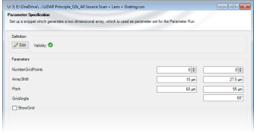 QxSJLi�7t� b1�(7<���o VirtualLab Fusion技术 QgZw�U$`p0
QxSJLi�7t� b1�(7<���o VirtualLab Fusion技术 QgZw�U$`p0
�e'FBV��[e