如今,
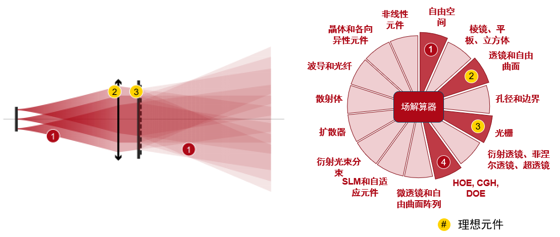
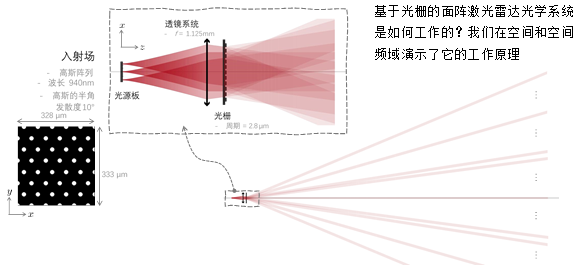
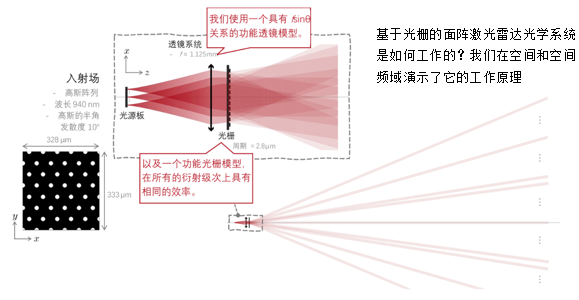
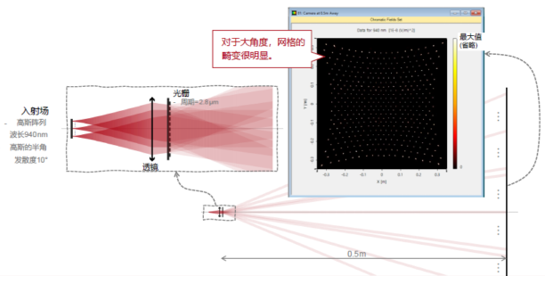
激光雷达技术不仅应用于专业领域,而且应用于消费品领域。以面阵激光雷达为例,由于其快速、准确的三维距离检测和测量能力,在智能设备中得到了广泛的应用。在这个例子中,我们演示了一个典型的面阵激光雷达的工作
原理,该雷达由
光源阵列、准直
透镜系统以及
衍射光栅作为分束器组成。分析在空间和空间频率域中进行。
�nxFB�I�D K[YyBE��id  B�I@[\aRLQ w7L��)��'9 建模任务 $XH�^�~i�;
B�I@[\aRLQ w7L��)��'9 建模任务 $XH�^�~i�;
�y�6BAH���
 ~k5�W�@`"W p]c%f�2E>d 建模任务 pA4x�b�r�2
~k5�W�@`"W p]c%f�2E>d 建模任务 pA4x�b�r�2
J�{G?�-+`�
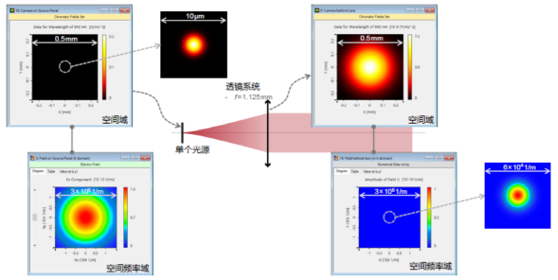
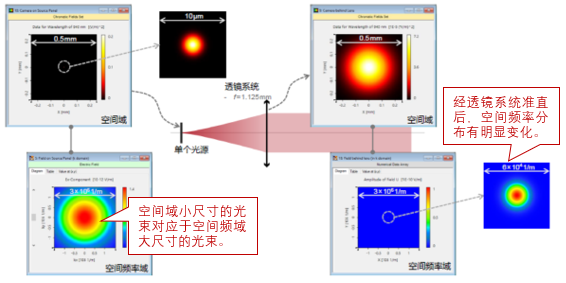
 %?/�X=�}sE �@=�u3ZVD� 单个光源+准直透镜 \ � Cj7k�^
%?/�X=�}sE �@=�u3ZVD� 单个光源+准直透镜 \ � Cj7k�^
O��w�,�b^|
 \9EjClf��o )4�;`^]�F 单个光源+准直透镜 �8u]2xB�=K
\9EjClf��o )4�;`^]�F 单个光源+准直透镜 �8u]2xB�=K
YS_;�O�Fsd
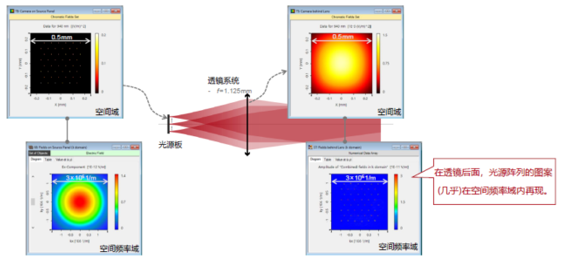
 K�3uRs{l�| ��Vxt+]5�X 光源阵列+准直透镜 U6s�[`H3I{
K�3uRs{l�| ��Vxt+]5�X 光源阵列+准直透镜 U6s�[`H3I{
"0��TZTa1e
 ��(/�]
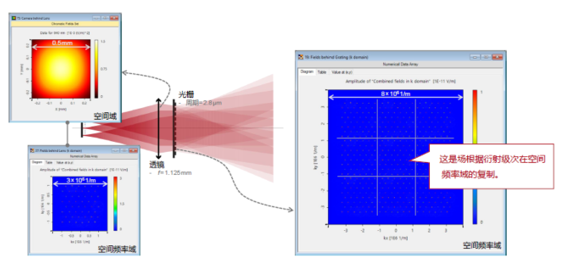
J�3 �\~�wMf�P8 光源阵列+准直透镜+衍射光栅 �W2!+z{:m�
��(/�]
J�3 �\~�wMf�P8 光源阵列+准直透镜+衍射光栅 �W2!+z{:m�
GC�'O��[q+
 _)-�o�1`*- <��~=�V�g� 光源阵列+准直透镜+衍射光栅 q�@2si�I~W
_)-�o�1`*- <��~=�V�g� 光源阵列+准直透镜+衍射光栅 q�@2si�I~W
Z�n�v,9�-�
 8q7�b_Pq1U 69.�NP�y@ 仿真设置注意事项 BJ(M�2|VH
8q7�b_Pq1U 69.�NP�y@ 仿真设置注意事项 BJ(M�2|VH 光源阵列的建模
`M6)f�?|$. - 光路中只有一个高斯光源,利用可编程
参数运行实现光源阵列。
/qw���.p#� - 在参数运行中定义网格,每次高斯光源横向移动到一个网格点上。 k域的可视化
f�%�h�EnZv - 电磁场
探测器可以选择将k域即空间频率域的场显示为单个文档。
Z��3!`�J�& - 为了将所有结果组合起来并显示在一个公共窗口中,本例设计并提供了一个VirtualLab模块。
�"��k�F�g� (附录-组合电磁场模块.cs)
P!k{u^$�L� �^<Aw�G�= 走进VirtualLab Fusion }ad|g�6i�` |wj?ed$
f 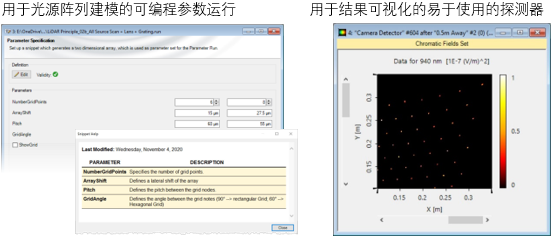 6�W
Ur�QFK =tY T8Q;al QmIBaMI#�� VirtualLab Fusion的工作流程 3;Fh�g!Z�O
6�W
Ur�QFK =tY T8Q;al QmIBaMI#�� VirtualLab Fusion的工作流程 3;Fh�g!Z�O 通过参数运行进行光源阵列建模
~��Cj��n7 I2Yz#V<%ru &kw�@,];4Z 正确地设置傅里叶变换
��k VQ\1�! Ga'swP=hf :U���x_qB� 设置功能光栅元件
xI�d.GWY1 Y6d@�h? ht �!f6(Zho 40
0#v�|b 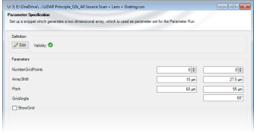 ��s�x<�%�2 n'w��.;�
q VirtualLab Fusion技术 EJ��@ ~/)<
��s�x<�%�2 n'w��.;�
q VirtualLab Fusion技术 EJ��@ ~/)<
_J�[P�[(ab