1. 描述 �E%`J�=C}� ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 n�4k�q=Z%� ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 �x]c8?H9,& ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 ^��Gk`��n�
R])��Eg��& 2. 系统 |'?vl�UCd� cj[b�^Wv:� 文件名:UseCase.0082_FocussingSystem.lpd
5tl�R��rf 3. 透镜系统组件编辑 jA{5�)��-g
L�0wT��:x*
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 &!8 WRJ���
■ 透镜系统是由序列光学表面(OIS)定义的。 Q�XkA�%'@'
■ 每一个可选项都有独立的参数,并可以设定。 *2z�p>(%��
■ 包括序列光学表面和光学介质。 %�y6��Q3�@
^�#:;6^Su� y&�$��n[j 4. 光线追迹系统分析器-选项 +5zX�bf�O �8S1@,�O,� x4^nT=?6�_
■ 分析器允许用户指定使用光源的光线选项。 <�<�>+z5D+
■ 可以选择选取光线的方法: |��owr?�tC
— 在x-y-网格 !���vwio!
— 六边形 *?X��&Y8Kf
— 自由选取 ��;�@�eP�u
■ 每一个可选项都有独立的参数,并可以设定。 [��{�7#IZL [9"�>�}�l 5. 系统的3维视图 ]@$^Ju��,� yLC��[-�.H 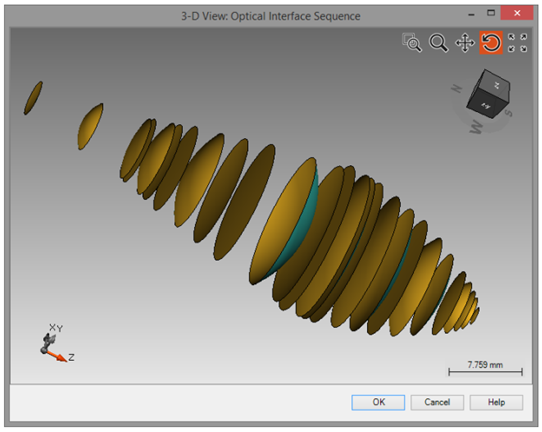 yz�S^�8,��
yz�S^�8,�� 光线经过整个光学系统的三维视图
v,-T��k=qP 光线经过整个光学系统的三维视图(局部放大)
O=o}uB-*�6 W�>��p�e-� J�>_mDcPo� pQa51���nc �+VUkV-kP� y[ dB��mTY 8. 透镜系统后虚拟屏的结果 �^�Hn�}�\5 ,%9XG0�77� >+%#m'Y�&&
■ VirtualLab可用于计算点列图。 px�;~20�$e
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 UdO8KD#�r3
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 Ux_�tzd0!
■ 你可以通过下面的操作将背景颜色该为白色 lM\dK)p21O
lM\dK)p21O
}�Ws�P�u�o 9. 焦平面上的结果 E/:��U,u�{
5�sY���$��
eHgr"f*7
�
■ 在左侧图片中可以看到焦平面上计算出的点列图。 /���!Rv�a"
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 #&|�"t<�}�
■ 焦平面上的光斑尺寸为183mm >�j?5�?J�"
■ 此外,背景颜色也可以预先设置。 N�N4Z�:6W5
■ 该测量采用均方根(RMS)计算法。 �Oa/^A-�'Q �XVs]Y'*�x 10. 总结 d4b��! �
r ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 ? $B4'�wc5 ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 �0C<\m\|~k ■ 此外,系统可以直接利用光线追迹引擎进行分析。 B
/;(#�{U; ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 �k[x-O?$O@
�k[x-O?$O@



