示例.0082(1.0) 0#�Y5_i�|p :zke %�Yx� 关键词:光线追迹,高数值孔径,点列图,光斑尺寸 qv�K�G-�|j
_F�U_Ubkr� 1. 描述 K+�K�#+RBK ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 Z4w!p�?Wqa ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 .gl�A
�g�t ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 ��)e=D(q�d
u5b|#�&-mX 2. 系统 Q�%f^)HZGR Kaq�c74�Mv 文件名:UseCase.0082_FocussingSystem.lpd
pG�^������ 3. 透镜系统组件编辑 �_P 3�G���
lc1(�t�:"[
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 }t=!(G�Ob}
■ 透镜系统是由序列光学表面(OIS)定义的。 �b;W�3�j��
■ 每一个可选项都有独立的参数,并可以设定。 �&�P�}_bx�
■ 包括序列光学表面和光学介质。 BWv^��z��i
L;NvcUFn� RVA��(Q[ ; 4. 光线追迹系统分析器-选项 ;dtA4:IRZ4 qJa �H���, kY|�u�toAP
■ 分析器允许用户指定使用光源的光线选项。 bL+_j}{�:N
■ 可以选择选取光线的方法: N06OvU2>xU
— 在x-y-网格 �PI�:4m%[�
— 六边形 �.*�?wF���
— 自由选取 �
�Rn(ec�
■ 每一个可选项都有独立的参数,并可以设定。 t�?-n*9,#S ���+yH7v5W 5. 系统的3维视图 �Ms5ap<q# ���*�ebSq) 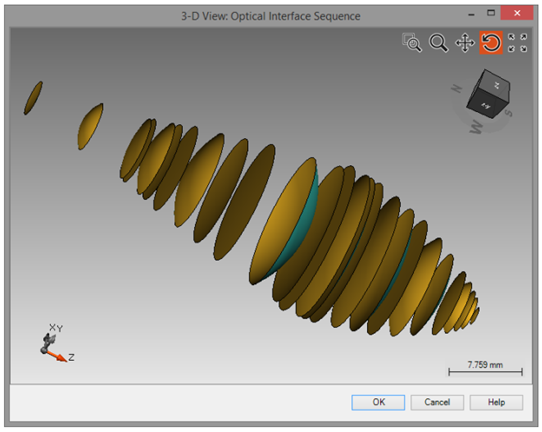 ��p��nowy;
��p��nowy; 光线经过整个光学系统的三维视图
\Fb�v�H�r, 光线经过整个光学系统的三维视图(局部放大)
.�9��on�@S uk<�4+x,2) "3)C'WlEy/ 1EO7H{�E=� �uG���f��@ H�ZzD��VCU 8. 透镜系统后虚拟屏的结果 .779pT!,M� zl>nSnd�RE �G~^r)fm_
■ VirtualLab可用于计算点列图。 L
O�_k�@3�
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 �\�=��?�a/
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 w���(�*�vj
■ 你可以通过下面的操作将背景颜色该为白色 7 �S�#J>�*
7 �S�#J>�*
��#zv3b[�@ 9. 焦平面上的结果 �5�5�nlg>j
53;}Nt#�R�
|"X*�@s\'
■ 在左侧图片中可以看到焦平面上计算出的点列图。 p�*R�;�hU�
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 lk�^Ol&��6
■ 焦平面上的光斑尺寸为183mm b,l$��1��{
■ 此外,背景颜色也可以预先设置。 ��l�d|5TN1
■ 该测量采用均方根(RMS)计算法。 (Du@��� �S ~�d�rS�} V 10. 总结 n�71�r_�S* ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 X�k�~D$~4< ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 M)J5;^�[" ■ 此外,系统可以直接利用光线追迹引擎进行分析。 D�bBc��Q% ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 &Cq`Y �!�y 8\@m
- E!{
��&=@IzmA� QQ:2987619807 'V�zp2����



