示例.0082(1.0) ,V�9��r2QY %J�+ w�9Z� 关键词:光线追迹,高数值孔径,点列图,光斑尺寸 A�4*D3\>%u
M�r*��CJgy 1. 描述 \m�aj5Vl�J ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 E�#A}2|7,g ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 �8ly�Ng w1 ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 *Z+U}QhHD6
q��YPgn�_� 2. 系统 >[N6_*�K�] ac,�<�+y7A 文件名:UseCase.0082_FocussingSystem.lpd
s��Y[!=`�@ 3. 透镜系统组件编辑 E<p<"UjcCJ
o�{' J��O3
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 �6o�^O%:0g
■ 透镜系统是由序列光学表面(OIS)定义的。 aI;f�Ny�/K
■ 每一个可选项都有独立的参数,并可以设定。 �"^ aSON�z
■ 包括序列光学表面和光学介质。 #s�v�:)��p
LWx�P}�? = 3t5W��wrNh 4. 光线追迹系统分析器-选项 a�
*bc#�!e f*EDS�Ju\� *o�6�QB��b
■ 分析器允许用户指定使用光源的光线选项。 -%J�m-^F I
■ 可以选择选取光线的方法: 5>�:p'z�I�
— 在x-y-网格 U�ZL-mF:)&
— 六边形 ug/�P��>0
— 自由选取 PWV+��M@�
■ 每一个可选项都有独立的参数,并可以设定。 ;[7#�h8��� 3�!Mb<W.�3 5. 系统的3维视图 :4>�Lt�fA� CH�d�YY7\{ 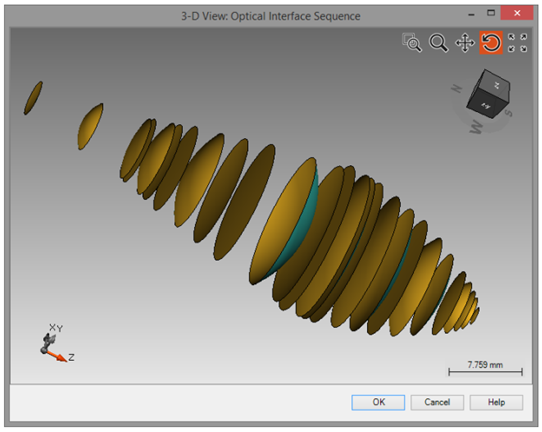 eH�9�-GGr�
eH�9�-GGr� 光线经过整个光学系统的三维视图
+�7t:�/_b~ 光线经过整个光学系统的三维视图(局部放大)
6��02=�q�b =�/��N0^�� VKr
oikz@] M�E�NrP5AL 2yV�{y#\�� r+n��hm"9 8. 透镜系统后虚拟屏的结果 af/;D���r@ �P1y�n�C�e �SU�4~x��0
■ VirtualLab可用于计算点列图。 (!<G` ;}u�
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 1g�H>B�5�`
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 ��%U$�%�x�
■ 你可以通过下面的操作将背景颜色该为白色 �z�h4m`�}p
�z�h4m`�}p
\fC��}l
Ll 9. 焦平面上的结果 BeM|1pe�.�
�d\r�s/e�e
v�?4��MndR
■ 在左侧图片中可以看到焦平面上计算出的点列图。 3q1u�9`�4;
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 ptpu
�u=3"
■ 焦平面上的光斑尺寸为183mm W.<I:q�`eO
■ 此外,背景颜色也可以预先设置。 _lG\�_6oJ,
■ 该测量采用均方根(RMS)计算法。 c��K2U�s+h MtK5>mhZI` 10. 总结 ZQD�w|*�a@ ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 �b���.v^:M ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 �zC$(/nZ�
■ 此外,系统可以直接利用光线追迹引擎进行分析。 ZSW`/}Dp;� ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 Ks^EGy+O:- J�OH=)+xj
a.g:yWL�\� QQ:2987619807 _qh�YG1�t�



