在本次案例中,我们将利用无人机(UAV)组件进行仿真,分析以下4中情况下对无人机信道的影响: ~**�.�|%Kc 1. 无人机(UAV)的理想传输通道 x~�j`@k�,; 2. 无人机(UAV)光束漂移和抖动 �A6iq[b]�� 3. 无人机(UAV)在FSO中的湍流影响 �&q|K!5[�k 4. 无人机(UAV)中多模光传输 H1(U��w:V8 1.无人机(UAV)的理想传输通道 QS]1daMIK< 本示例中,无人机悬停在距地面500m高度,此为接收机高度;发射机为固定基站,架设高度距地面50m。收发两端的视距传输距离为6km。 *``JamnSO� 系统布局如图1所示。 n�mi|\mof� 图1.无人机(UAV)的理想传输通道项目布局
需要说明的是,示意图并非按比例绘制,该配置对应无人机信道的默认参数设置。 =k:,qft�2� 仿真完成后,观察输出光束可知:发射端光束腰斑 50 mm,接收端光束腰斑变为77mm,图2为经过UAV信道后的空间输出模式。 1q1jZqn�o 图2.理想传输条件下UAV信道空间输出模式
查看UAV组件的二维绘图,可清晰看到光束沿传输距离的演变过程 —— 从 50 mm扩展至 77 mm,这是自由空间光通信中高斯光束腰斑的典型展宽现象,如图3所示。 1�\�rz%E�� 图3.光束沿传输距离的演变
同时可查看接收机孔径与接收光斑尺寸,如图4。外圈为接收机孔径,内圈为接收光斑尺寸,可见光束完全被接收机孔径包裹。 �|WdPE�@�P 图4.接收机孔径与接收光斑尺寸
2.无人机(UAV)光束漂移和抖动 �)�M/��/l1 下面分析接收机端无人机机械振动的影响。 D��XK}-4"\ 开启光束抖动与光束漂移功能,运行仿真后,可观察到光束的变化,如图5所示。图6为考虑光束漂移和抖动后接收机孔径与接收光斑尺寸。 Y,e�� �B�| 图5.考虑光束漂移和抖动UAV信道空间输出模式
_�8)��*]-� 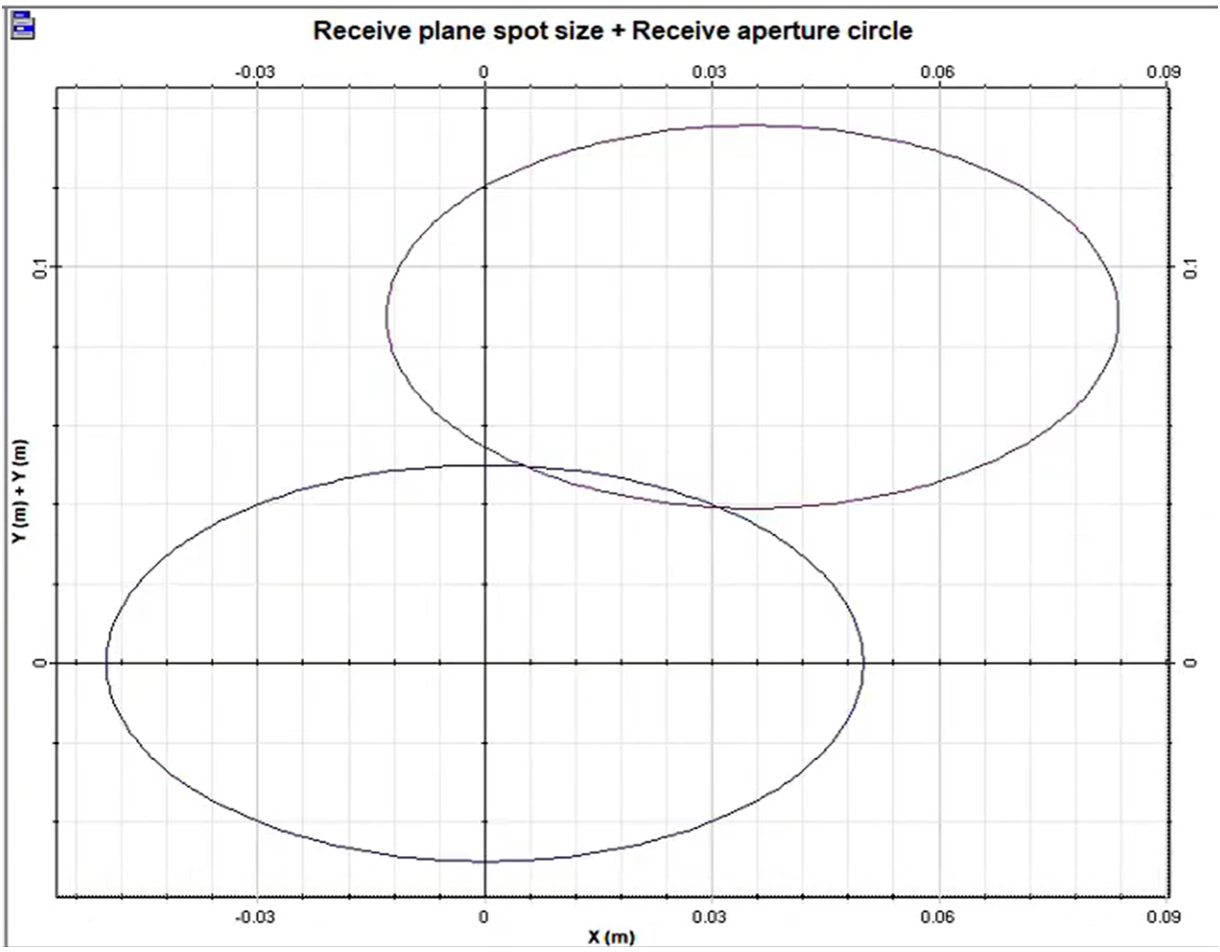
图6.考虑光束漂移和抖动后接收机孔径与接收光斑尺寸
3.无人机(UAV)在FSO中的湍流影响 ��Z�iu]'#� 接下来,我们将重点分析湍流区域相位对传输的影响。如图7所示,我们要仿真大气空间湍流在4 km至 4.5 km这段路径上的作用效果。 �yw�3�$2EW 图7.考虑大气湍流的无人机(UAV)信道项目布局
运行仿真后,可以看到光束经过大气湍流后出现明显的畸变,如图8。 ��FzXJ]�H� 图8.考虑大气湍流UAV信道空间输出模式
计算中若要叠加所有效应,可像之前一样开启全链路光束漂移与抖动。UAV组件二维视图中显示的接收机孔径与接收光斑,仅为粗略估算的光束中心位置,这个圆形标记不能完全反映畸变空间模式的真实湍流状态,只是近似表示接收机孔径与接收光斑的相对位置。 rkY[�E(S�Y 图9.考虑大气湍流接收机孔径与接收光斑
4.无人机(UAV)中多模光传输 %O;bAC�_M� 接下来,我们把光源换成拉盖尔横向模式发生器,为每个偏振态生成2 个模式,总计4 个模式,项目布局如图10。 ;H.�^i|�_/ 图10.无人机(UAV)中多模光传输项目布局
UAV组件提供两种传输模式:Independent和Combined,Independent为独立传输模式,Combined为相干传输模式。图11为各模式独立传输,互不影响,X 偏振下可分别查看 0 阶与 1 阶模式;图12为所有输入模式在传输起点相干叠加后整体传输。 5=?\�1`e1[ a)X偏振下0阶模式
b)X偏振下1阶模式
图11 Independent模式下X 偏振的不同模式
ze�C
RK+�- 图12.Combined模式下所有输入模式相干叠加
我们同样可以考虑光束漂移和抖动以及空间湍流,UAV传输模式选择Combined,图13为不同偏振态下的空间输出模式,图14为接收机孔径与接收光斑。 "E?2x��f|. a)X偏振下空间输出模式
b)Y偏振下空间输出模式
图13 考虑光束漂移、抖动和大气湍流下的多模光传输输出模式
图14.考虑光束漂移、抖动和大气湍流下的多模光传输接收机孔径与接收光斑



