双光楔式扫描
系统是一种共轴式折射元件的扫描方式。它利用双光楔的共轴相对转动连续改变组合楔角大小,获得系统光轴连续摆动以实现系统扫描的一种扫描类型。该扫描方式由于利用折射的光楔元件,光楔楔角大小受一定限制,因此扫描范围不宜过大。利用双光楔扫描可以实现一维线性扫描,两维平面扫描以及两位圆周扫描。再利用系统轴向调焦,还可以实现三维立体扫描。当然系统可以是物方扫描或是像方扫描均可。
V�S8Rx��.? �+!.^zp�21 在设计时,同样在连续几次选择菜单后,在“系统基本数据”窗体内选择“双光楔扫描方式”后会出现对应窗体,在窗体上选择扫描方式如“像方深度扫描”后,窗体形式如图1。接着再在 “设计”菜单点击“双光楔扫描系统设计”出现右图,利用图中滚动条即可进行自动设计。
u�5f9�Jw} 设计完成后可做各种扫描
仿真以及公差分析,幷给出公差分析
曲线以确保设计的准确性。
|4 0`B% Z� 图1.双光楔扫描型系统设计窗体 Z�ba2d�,8/
�*Yu�F�0Yt 利用一对光楔(双光楔)的绕光轴连续相对等速转动可以改变光轴偏转方向,OCAD可以实现双光楔系统的连续扫描。他与反射镜扫描不同就在于他的可连续性,而且其扫描中心轴与其入射光轴保持一致,为此可以在双光楔转动扫描的同时,利用
光学系统整体或局部绕光轴转动实现系统圆锥式扫描。此外,在一个
光学系统内可以同时使用两套双光楔可以实现两维平面扫描。
Z�X�./P0 �338k?nHxv 1.双光楔一维线性扫描系统设计
�7�\Y�0z� (�M.&^w;`, 利用一对双光楔的相对转动可以实现光学系统的一维扫描。在扫描过程中如果在像面上的像面尺寸不变可以对应物方位置变化,形成在保持物方瞬时
视场不变的前提下对物方目标进行扫描。反之如果保持物方画面不变,可以实现在像方进行像面扫描。
X?qK��0�fS 为实现双光楔一维线性扫描系统自动设计,可以在主窗口界面环境下利用“编辑”中的“系统基本数据”菜单窗体内选择“扫描系统”的“双光楔扫描方式”出现设计窗体如图1。
6gu!bu`��~ 然后在此窗体内选择“物方扫描”或“像方扫描”,再选择“线性扫描”。此时就可以在窗体内填写设计要求,比如物(像)方扫瞄视场(角度)、扫瞄视场(角度)公差要求、指定计算扫描数以及指定光楔角度单位(角度或角分),再就是要指定双光楔在系统内所在面序号。由于双光楔有两个光楔,每个光楔只有一个斜角面,因此在指定光楔面序号时要分别指定前后两个斜角面的斜角面序号。当然还可以给出光楔斜角面的斜角角度参考值及角度公差值。以上信息填写完毕,点击确定按钮“√”程序会立即自动计算出光楔的角度值完成设计。图2就是这的设计满足设计要求的系统结构示意图。图3为双光楔一维线性扫描系统像面误差曲线图供误差分析参考。
v�uY��~��_ .jj�G��(L 图2.双光楔一维线性扫描系统结构示意图 �6zuTQ^�pz
H�*'I�K'�O 图3.双光楔一维线性扫描系统像面误差曲线图 57']#j#"hj
-fW�*vE:�� 2.双光楔二维平面扫描系统设计 Q:d]imw�!O O�d,qbU�4O 双光楔二维平面扫描系统设计可以提供光学系统在子午和弧矢两个方向的扫描效果。二维平面扫描就是对物方或像方进行二维的平面扫描。二维平面扫描可以是以光轴为圆心的圆形扫描,也可以是以光轴为对称轴的矩形(正方形)的平面扫描。由于双光楔元件的运动是轴对称的因此只要在一维线性扫描的基础上双光楔一起绕光轴转动就可实现二维圆形扫描。其实二维圆形扫描就是一维线性扫描的的扩展,多加一个绕轴运动即可实现。
@O^6&��\s> 至于二维矩形扫描,也就是利用两对双光楔分别在子午和弧矢两个方向上做线性扫描就可完成。在进行自动设计时,在图4内选择“平面扫描”,窗体会显示需要分别填写子午方向扫描(帧扫)要求及弧矢方向扫描(行扫)要求及两个方向双光楔的所在面序号即可。填写具体含义同一维线性扫描内容。数据信息填写完毕,点击“确定”按钮,程序会立即计算出两组双光楔的角度设计值如图5。图6分别显示了双光楔二维物方矩形扫描系统子午和弧矢两个剖面结构示意图,图6显示了系统物点扫描轨迹及像方扫描点误差曲线。像方扫描点误差相当于物方扫描畸变。
@YTaS�z�$L 图4.双光楔二维平面扫描系统设计
-**g~ty)� 图5.双光楔二维平面扫描系统结构示意图
@>Km_A���x 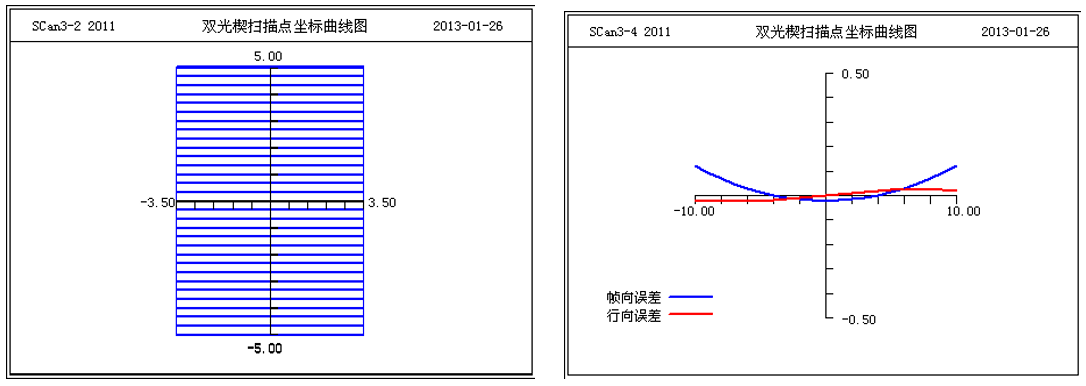
图6.双光楔二维平面扫描系统像面扫描及误差示意图 3K0A)W/YEs
5f K_Aq��{ 3.双光楔三维立体深度扫描系统设计 _H�7x9
y=� PmEsN&YP]� 双光楔三维立体深度扫描系统顾名思义,就是指扫描系统不仅在某一固定像面上扫描,还可以在像面纵深方向上做立体扫描。立体扫描一般多为运行扫描和深度扫描的结合,形成圆柱形(筒形)扫描。此种扫描可以用于各种深度探测或深度打孔方面的应用。根据在不同深度上平面扫描的面积不同,可以实现筒形、锥形和倒锥形扫描。
U$D65�B4�= l L@X�M2"� 图7.双光楔三维立体深度扫描系统结构示意图 g�u.}M:��u
qHlQ+:�n 在扫描过程由于扫描前端面对扫描
光线的遮挡,特别是对倒锥形
激光打孔时,必须注意对扫描光线岀瞳位置的控制。为此往往还需要使用一对补偿光楔动态控制光线岀瞳位置。补偿方式有如图8所列供选择。
#yF&X(%�� 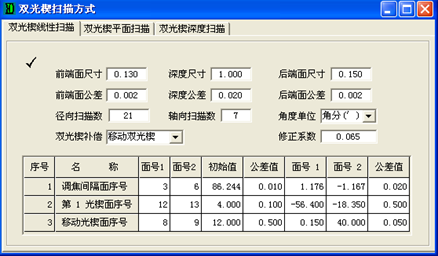 �Vd�+T$uC� �O�^duZ*�b
�Vd�+T$uC� �O�^duZ*�b 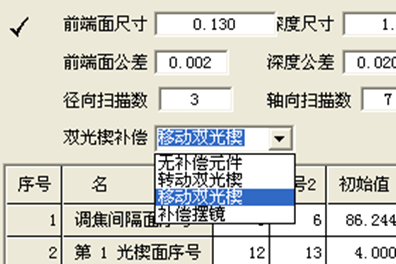
图8.双光楔三维立体深度扫描系统设计 ywmo#�qY�e
�,G?�WAOy, 由于双光楔三维立体深度扫描系统设计时变量因素较多,而且各自影响又比较独立,因此采用手工调节的方法比较直观有效,设计时只要在如图8填写完有关
参数之后点击“确定”按钮即可出现一幅新的设计画面如图9。利用每行数据右侧滚动条即可随意修改相应参数幷在上方图形中及时动态观察扫描光线变化情况以确定满足要求的设计参数值。为观察设计效果,可以利用图10下方所示 “扫描方式”下拉式菜单观察设计中的各种信息,其中扩扫描光线的各种扫描效果、扫描轮廓图形、图形误差以及扫描轮廓误差及公差分析等,如图9、图10、图11及图12所示。
E�,x+Je�KV 图9.双光楔三维立体深度扫描系统深度扫描示意图
��YWO)HsjP 图10.双光楔三维立体深度扫描参数优化滚动条示意图
�">,�|V-�H 图11.双光楔三维立体深度扫描系统公差合格率数据及曲线图 ��Zaf:fsj>
图12.双光楔三维立体深度扫描系统像面轨迹示意图



