|
|
—
本帖被 从 光学设计及经验 移动到本区(2026-02-28)
—
激光测距技术在物联网智能交通中的一些可能应用方向,主要包括:激光测速传感器、汽车防撞系统、车流量监控、车型描画、车辆行人违法监测以及其他一些精密监控测量中的应用等。 &|s�+KP|d� +O�&RB�Ea[ 汽车防撞探测器 �Q^[e�/�U, 一般来说,大多数现有汽车碰撞预防系统的激光测距传感器使用激光光束以不接触方式用于识别汽车在前或者在后形势的目标汽车之间的距离,当汽车间距小于预定安全距离时,汽车防碰撞系统对汽车进行紧急刹车,或者对司机发出报警,或者综合目标汽车速度、车距、汽车制动距离、响应时间等对汽车行驶进行即时的判断和响应,可以大量的减少行车事故。在高速公路上使用,其优点更加明显。 ^=Q8��]W_* wH+FFXGJs� 车流量监控及车轮廓描画 fE�'-.nA+� 这种使用方式一般固定到高速或者重要路口的龙门架上,激光发射和接收垂直地面向下,对准一条车道的中间位置,当有车辆通行时,激光测距传感器能实时输出所测得的距离值的相对改变值,进而描绘出所测车的轮廓。 BXNI�(7xi� 这种测量方式一般使用测距范围小于30米即可,且要求激光测距速率比较高,一般要求能达到100赫兹就可以了。 B%�TXw#�|� 这对于在重要路段监控可以达到很好的效果,能够区分各种车型,对车身高度扫描的采样率可以达到10厘米一个点。对车流限高,限长,车辆分型等都能实时分辨,并能快速输出结果。 +��:�f�qL 在没有车辆到来时,激光测距传感器测出的是一个距离常量,也就是激光测距传感器到地的距离,当有车辆从激光测距传感器下面经过时,距离值改变,当距离值再次回到常量就认为有一辆车通过,根据这种方式我们可以对通过一些路段的车流量进行监控。 �<"hb#Tn 现在常用的方法是对一段时间内的车流进行统计平均的方法,带有很大的估计成分,而视频统计的方法还有很多现实应用的困难,因此,激光测距统计方法为车流量统计提供了一种可行的方案。 U�?JiV�xE^ �GSC�{F#:z 车辆行人违法监测 1�X�qIPiXJ 由于激光测距传感器的光束不是实质性的障碍,在利用激光测距传感器对路面进行监控的时候,并不会阻碍交通的正常运行。 -l\~�p�4�U 因此,在一些禁停或者禁止行人车辆通行的路段,用激光束平行路面以一定高度进行固定发射或者以一定角度进行扫描,当遇到有车辆违法停车闯红灯或者行人违法跨越护栏等,激光测距距离值改变,可以进行报警或者警示。 Po'-�z<}wS 这种应用光束不必要太宽,但一般要求测距距离比较长,以确保一定路段长度的防护距离。这种方式构成的智能交通违法监控系统将在交通物联网中得到很大的应用。 Y�||y�zJdC �J 5Wz�4`' 激光测速传感器 N�$C�{f;xV 激光测距传感器是激光测距技术在交通管理领域最早的一种形式,因为其卓越的性能,在实际应用中逐渐得到普及。激光测距传感器是采用激光测距的原理,是对被测物体进行两次有特定时间间隔的激光测距,取得在此时间间隔内被测物体的距离变化,从而得到该被测物体的移动速度。 f#'8"ff*1� 激光测速仪分为固定式的和移动式两种,固定式的一般固定在路边或者龙门架上,以一个比较小的角度迎向来车,一般通过车牌反射进行测量,测量精度比较高,可以达到±1公里/小时,测速范围可达250公里/小时,测距范围在此应用中不用太大,一般80到100米即可。 �d�i"C]" ; 移动式激光测速仪对操作要求比较高,一般光束发散角度要大于3 mrad,鉴于激光测速的原理,激光光束必须要瞄准垂直与激光光束的平面反射点,又由于车辆处于移动状态,车体平面不大,且测速需要一定时间,只能作为临时测速,取证应用。 K5 5�} �Wi 激光测距传感器由于光束发散角度较小,便于测速取证,不像雷达多普勒测速仪,在多车道测量时不能确知超速的具体车辆,且由于激光测速传感器发射的是近红外的光波,不能被雷达探测器、电子狗等探侧,且不易受市区雷达杂波干扰。 <\E"cl�ZI� �)?F�$-~�7 在当下最火热的无人驾驶领域,也是激光测距传感器大显身手的地方 BP�w�I8\V� �\�_�lG#p|
7��bA4��P* 谷歌的无人驾驶汽车一个“突出”的特点就是其车顶上方的旋转式激光测距仪,该测距仪能发出 64 道激光光束,帮助汽车识别道路上潜在的危险。该激光的强度比较高,能计算出 200 米范围内物体的距离,并借此创建出环境模型。 )w
Z49��>Y �F5<"�ktnI  F9Ifw><X�M F9Ifw><X�M 谷歌无人汽车 O�yi;�bb<# 据负责无人驾驶汽车项目的总工程师Sebatian Thrun介绍,整个系统的核心是车顶上的激光测距仪(Velodyne 64-beam)。该设备在高速旋转时向周围发射64束激光,激光碰到周围的物体并返回,便可计算出车体与周边物体的距离。 nw~/�~eM5= )`B�
-�O::
eFt\D�\XOW 计算机系统再根据这些距离数据描绘出精细的 3D 地形图,然后跟高分辨率地图相结合,生成不同的数据模型供车载计算机系统使用。 6W�)x�j6<@ �'q{P�tY�r
汽车顶部的激光测距仪是整套系统的核心 %�T`4!:v�y
无人驾驶系统描绘出的3D地形图 6.7�`0v?,n
q�g�wv=5�| 我司有多款激光测距仪,覆盖多个应用场景,如有需要,欢迎加威:threephy fKP�iRl�LS !T<�z'�zZU
+L^A:�}L(� 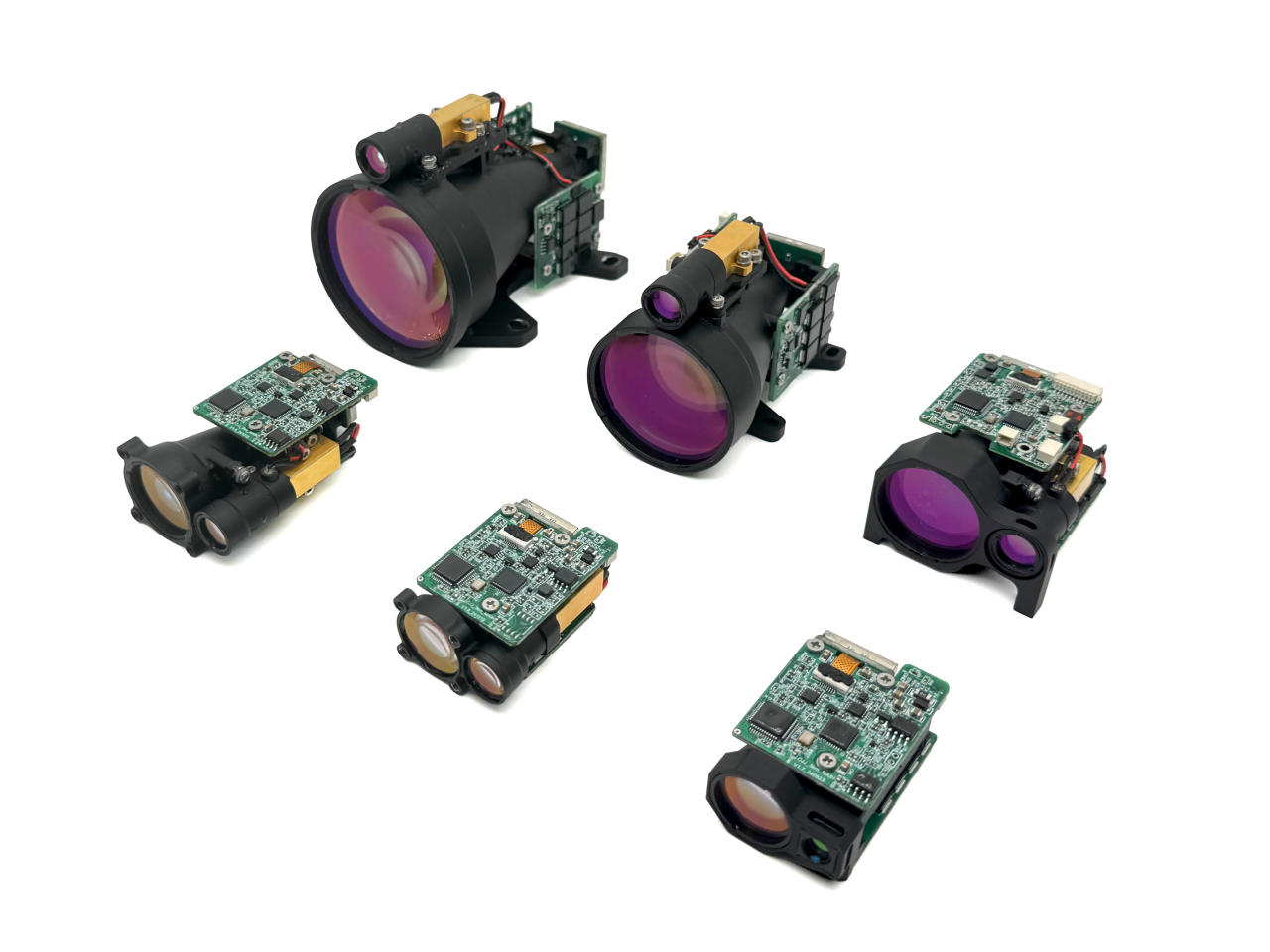 ybD�{�4&ZE ybD�{�4&ZE
|



