VirtualLab Fusion软件可以设计和分析包含扫描镜和f-theta光学透镜的激光扫描仪 9/'zk����� :���*k���� 激光扫描
系统使用可移动的
光学元件,能够使激光光束的位置动态变化。这类系统的典型应用有:
j�&�(aoGl@ 激光材料加工
h�a&�2��V= 激光投影
r�zsAn�Lxo 3D物体扫描
�G&y< �lh� 条形码阅读器
Z]jm.'@z@ ��2guWWFS� 软件VirtualLab Fusion提供了基于
光线追迹以及物理光学的模拟技术以用于激光扫描仪系统。并可计算典型的透镜像差,例如场曲和畸变。同时,VirtualLab Fusion还可以将衍射效应考虑在内,精确的研究光束尺寸和光束剖面。VirtualLab Fusion将
参数耦合工具与灵活的定位概念进行结合,允许模拟非常复杂的扫描仪
光学系统。VirtualLab Fusion的参数
优化和参数运行工具能够进行激光扫描系统的设计和公差分析。
1<IF@_���_ ezS@LFaA�� VirtualLab Fusion 软件的特性:
B"P-h�^oiV !#xk?L�yB 分析典型像差,例如场曲和畸变
_=S��4H�� 精确的研究光束尺寸和光束剖面
���{�)=�h� 使用参数优化设计扫描系统
6R1}f�dHvP 实验公差分析
��2� ,�R�O 易于使用的定位概念和参数耦合工具
AR8zCKBc�^ 真实的激
光源建模
p�b�JC A& 设计折射光束整形器
js^�+��{~� C+tB$ya�hO 软件和应用案例:
<��#H��QU< �2<q.LQ�}< 如果对更多信息感兴趣?请通过
support@lighttrans.com联系我们或使用我们的VirtualLab Fusion的试用版和案例来进行实际的操作:
i-Er|u;� W }g&A�=u_2 LSC.0001:使用一个非球面透镜对激光扫描系统进行性能分析
%�s&l^&�ux LSC.0002:使用f-theta对象对激光扫描系统进行分析
:rR)�r��j' 现在就下载VirtualLab Fusion试用版!
包含两个扫描镜和f-theta对象的激光扫描系统。可以用VirtualLab Fusion进行模拟和优化整个系统
0&�wbGbg(W 激光扫描系统(LSC.0001 v1.0) \�k&2nYVHf 使用非球面透镜对激光扫描系统进行性能分析 }JPL�hr|d^
Ps<;DE\$f4
应用案例简述 /�z�V&ebN] W�w\M3Q`h 系统细节 ~*NG�~Kn"s ;@/^�hk{�A 光源
#�O����<, – 绿光二极管
EId�EX�AC( 元件
IP�HZ~'M�� – 双轴振镜扫描仪
{/ef`MxV
} – 非球面透镜
[P�_@-:(O 探测器
,#�?iu?i/� – 场曲和畸变
1xBgb/��+� – 光束强度剖面
mQd
L"caA – 焦点区域探测器
7F$G.LhMw� – 光束参数
�p#;I4d �G 模拟/设计
{$�Aw�G#kt – 光线追迹:分析场曲和畸变,场追迹引擎的探测器的定位
05SK$
Y�<< – 场追迹:考虑衍射效应,进行更精确的光束尺寸和剖面的研究
,�9�~=�yC� �{(#��2G,� 系统说明 tleWJR8�oc ^��GL>xlZ( t nv�CtuaR r{mj[�N'�@ 激光扫描系统的性能评估 �
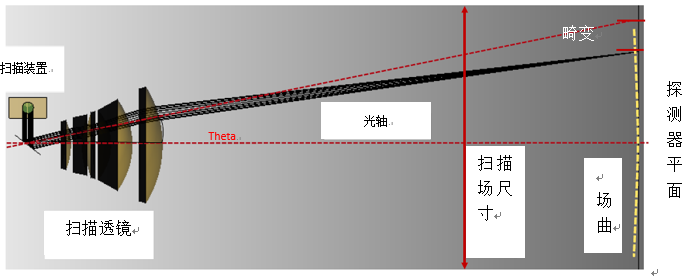
:d)��y� �x�ky +��" 一个激光扫描系统的扫描光学部分包含了一个扫描仪单元和一个非球面透镜,在一维扫描过程中(沿入射角Theta),通过分析光束的场曲和畸变来评估其性能。
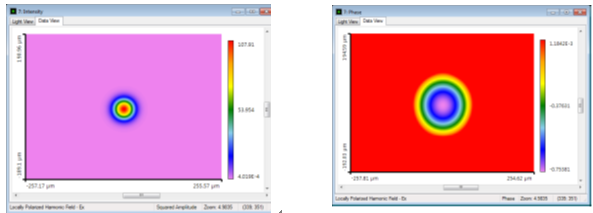
H"5�=�z7�w 此外,计算了不同扫描位置处的光束尺寸和轮廓。
�Gv\39+9�= Lqa�|9|��! 模拟设计结果 y�or6h@F1�
Q�� ���h~ VirtualLab Fusion的其他特征 omu�)�s
'8 6C�j$x.�-K 在本例中,您受益于以下选中的特性:
q�e[P'\�]L 各种探测器
�?Z�(xu~^/ – 使用场曲和畸变探测器(Field Curvature and Distortion Detector)中的寻找焦点位置工具(Find Focus Position Tool)来探测焦点和光束位置
OrP�i ("�/ – 使用焦点区域探测器计算焦点区域中的场
�h�[(����. 参数耦合
6N<�
snBmd – 调整反射镜方向,使期望的入射光束对扫描物镜产生Theta的入射扫描角度
�2QIx~Er� 参数运行
'f�_�[(o+n – 生成场曲和畸变图
8*&|�Q1`K: �rK~�O��bv 总结 ��i K,^|Q8
��:q34KP� VirtualLab可以
;s\ck:�Xg� 使用双轴扫描镜装置和具体的扫描光学来模拟一个激光扫描系统
c9�O0YQ3&8 分析目标平面上的光束偏离
�vw2yOL�RX – 通过光线追迹来计算场曲和畸变
iy-~CPNB_� – 通过几何场追迹来计算光束剖面
C�bW>��yr� – 场追迹可以更准确地分析光束焦点
�L)"��E�_� ]5a�,%*f�+ e|
Sw+fhy< 激光扫描系统(LSC.0002 v1.0) R�LNto�5?� n?�m�V(?�N �|V-)�3�#c 使用F-Theta物镜的激光扫描系统的性能分析 >(He,o@M�� �9��v�3%a3 简述案例 �O>,Rsj�!e Lq#�$q>!K� 系统细节
~0V��,B1a� 光源
�v43F�U�3� – 绿光二极管
6 K-j�je;) 元件
�/�NB;eV? – 双轴振镜扫描仪
K<E|�29t^k – F-Theta物镜
ana?�;N�vC 探测器
0eFvcH:q�G – 场曲和畸变
� j�|ow��U – 光束强度剖面
_FxQl�]��@ – 焦点区域探测器
(5�h+b_�eB – 光束参数
C�^� �1;r9 模拟/设计
v�=J[p;H^H – 光线追迹:分析扫描场尺寸,场曲和畸变
�5pz(6g�A – 场追迹:更精确的光束尺寸和剖面的研究,包括衍射效应
`�nv82��v� �DAVg�P7h' 系统简述 sn��vixbN� 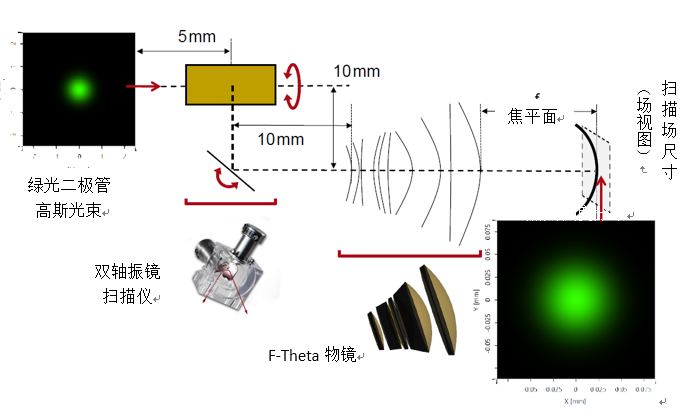 t|]2\6acuc
t|]2\6acuc 由扫描装置和一个F-Theta对象作为光学扫描组成的激光扫描系统的性能评估,是通过在一维扫描过程中沿着入射角θ分析场的曲率和光束扭曲。
G�F17oM�i� 另外,计算扫描场尺寸(=场视图)以及不同扫描位置的光束剖面和尺寸。
<�2ymfL-q z;1qYW[-A� vv^(c w>�A 模拟和设计结果 [D�SD[[
z[ &��XZS}��n VirtualLab的其他特征 j-�(k�`w�\ �)ua��zB!X 在本例中,您受益于以下所选的特性:
�LWI��P�q" 各种探测器
xC
�YL3�hl – 测量焦点位置(与反射镜扫描角度有关)
cIO�M}/gqv – 测量探测器平面的光束位置
H��Ob0\X�� – 使用焦面区域探测器计算焦点区域内的场分布
dW9��Ci"~v 参数耦合
dS)�c~:&+� – 调整反射镜方向,使期望的入射光束对扫描物镜产生Theta的入射扫描角度
'eg;)e:`b+ 参数运行
L�9^h�.�Y7 – 评估扫描场尺寸
aqoxj[V^3L – 生成场曲和畸变图
BkJNu_{m?� @R�s3i;�"W 总结 s^>1rV]=(` VirtualLab可以:
XHYVcwmDz- 使用双轴振镜扫描仪和F-Theta物镜来模拟激光扫描系统
I�3" GGp3L 分析目标平面上的偏离光束
[*z�`p;n2D – 通过光线追迹来计算场曲和畸变
W�?2Z31;7� – 通过几何场追迹来计算光束剖面
� �o��\-: – 场追迹可以更准确地分析光束焦点
 �-Ou�@T#h" a9niXy}�a(
�-Ou�@T#h" a9niXy}�a(