5�L�n,{vsv VirtualLab Fusion包括一系列建模方法便于用户可以地调整
光学仿真的精度级别和时间。不仅如此,这种功能还有助于隔离物理原因产生的不同影响。在本示例中,我们提出了一个清晰的工作流程配置一个仿真,以便在物理光学
模拟中考虑或忽略
衍射效应。
|aS.a&v�wR H��$t_Xw==  R�S�RS wkC #gN&lY:CFn 2. 建模任务 /C:g�K�y4
yx[/|nZDC4
R�S�RS wkC #gN&lY:CFn 2. 建模任务 /C:g�K�y4
yx[/|nZDC4 如何在FieldTracing 2nd Generation 引擎中控制衍射的包含。
�Qd{C�Mm�x AV]2�euyn 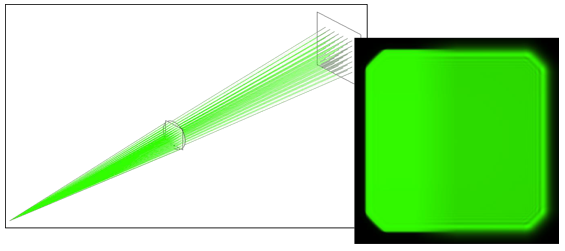 2@���],ZLa 3. 概览 ec;o\erPG� WE#�^�a��6
2@���],ZLa 3. 概览 ec;o\erPG� WE#�^�a��6 在一个由球面波、
孔径和
相机探测器组成的试样
系统上显示了如何控制包含衍射的工作流程。
��pah'>dAL 首先,利用
光线追迹引擎对系统进行不包含衍射的分析;
�G�e@{��_� 然后,使用场追迹引擎对系统进行分析,其中包含的衍射通常是自动包含的,但是可以通过不同的用户设置来控制。
Dml;#'IF3 u
c)e�i�l 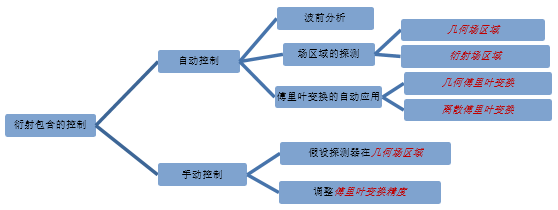 d7��y[0<xM 4. 光线追迹系统分析 L�l'�t>)�� ; DR$iH-F� ��
8dA~�\a
d7��y[0<xM 4. 光线追迹系统分析 L�l'�t>)�� ; DR$iH-F� ��
8dA~�\a 光线追迹系统分析器
WpP}s�tam/ - 通常开始使用光线追迹系统分析器(Ray
�oZgjQM$YP - Tracing System Analyzer)分析您的系统。
vA{�-�{Q�� �Z5n1@a�__ 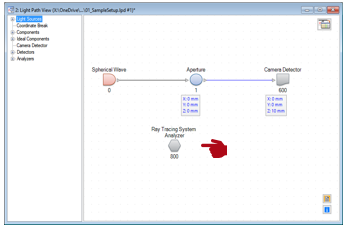 ?l{nk5,?-Y RtS+�<^2a;
?l{nk5,?-Y RtS+�<^2a; 用于演示工作流程的
原理设置包括
!f�[�_�+CD - 球面波,默认设置,但距离输入平面(Distance to Input Plane)10毫米;
�H*R"ntI?w - 矩形孔径,矩形孔径(Rectangular Aperture)为1mm×1mm;
IEi^�kJflU - 相机探测器默认设置。
tcI*a>��� FVK��TbvYn 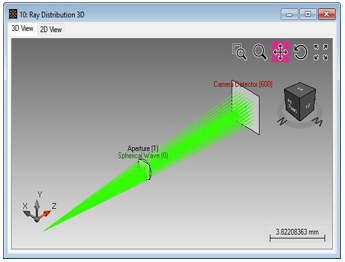 ���p]TAELy FW�4<5~'�
���p]TAELy FW�4<5~'�
光线追迹引擎
�\M^bD4';> - 接下来,应该使用光线追迹引擎检查探测器的输出,而不包含任何衍射效应。
�~36!?&eA8 cm+Es�6��; 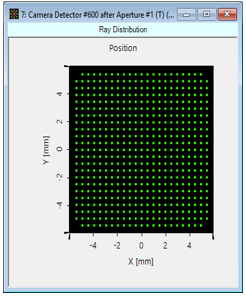 �g��!�|kp? 8��GUX{K�� 5. 场追迹系统分析 %tG�O?JMkd #;e:A8��IQ v�k�^�x�T
�g��!�|kp? 8��GUX{K�� 5. 场追迹系统分析 %tG�O?JMkd #;e:A8��IQ v�k�^�x�T 第2代场追迹
_G�@GpkSe> - 现在,该系统可以在不包含衍射的情况下通过场追迹进行分析。
8nV+e�~�-w - 这必须在检测器设置中通过激活复选框来设置,假设检测器评估的几何场区域。-因此,探测器上的强度图没有显示出任何衍射效应。
XR��i8�Gpg  Y�:[�u�1~a 8l���rpve |Rk@hzM�2S
Y�:[�u�1~a 8l���rpve |Rk@hzM�2S 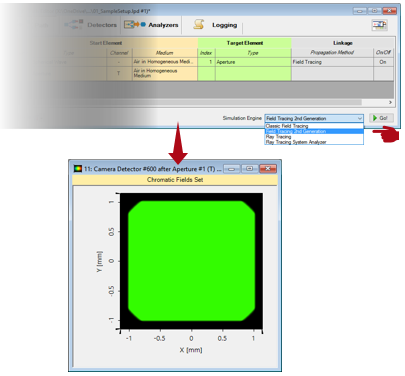 ���WO�ap+� o�nzxx4bax
���WO�ap+� o�nzxx4bax 第2代场追迹
4�!�?eR�Y� - 现在,该系统可以在包含衍射的情况下通过场追迹进行分析。
Fx�.=#bVX7 - 这必须在检测器设置中通过不激活复选框来设置,假设检测器评估的几何场区域。
m�{HS0�l'� - 在VirtualLab中,所需包含的衍射是由引擎自动决定的。
�4tBYR9�|� - 因此,探测器上的强度图显示出衍射效应。
B]�t�Q(s�~ ~]2K�^bh8& 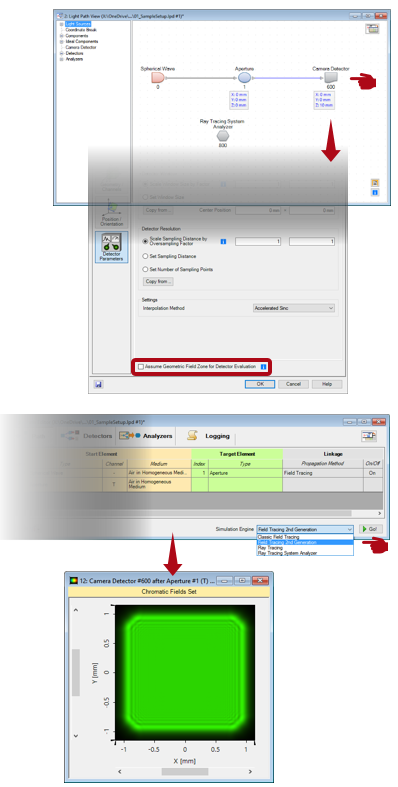 �iYy1�!��\ 26h2�1Z16q
�iYy1�!��\ 26h2�1Z16q 第2代场追迹
F�)eelPZ+, - 在这个示例中,可以通过减小球面波到孔径的距离来减小衍射的影响。
�4k�x�
N<] - 因此,到球面波输入平面的距离减小到3mm。
;i+j���J4 - 在某一点上,场跟踪引擎切换到强度模式的纯几何评估,而不考虑衍射。
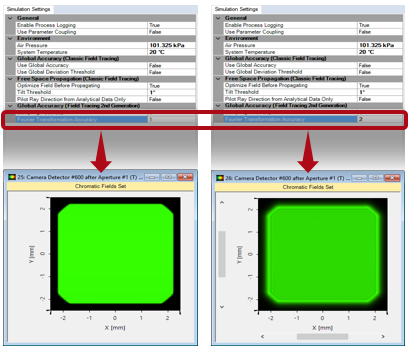
&^jX��Ez�; - 在第2代场追迹引擎的仿真设置中,通过提高傅里叶变换的精度,可以再次增加衍射的包含。
L!��x��i 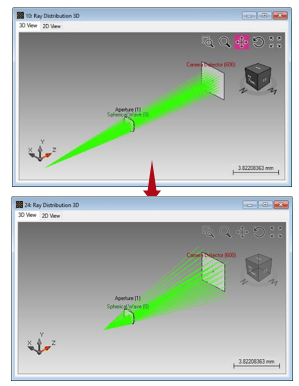 1yhD��rpm�
1yhD��rpm� 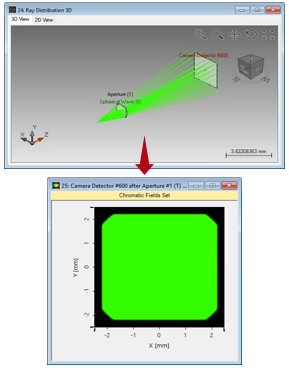 bk[!8-�b/a
bk[!8-�b/a