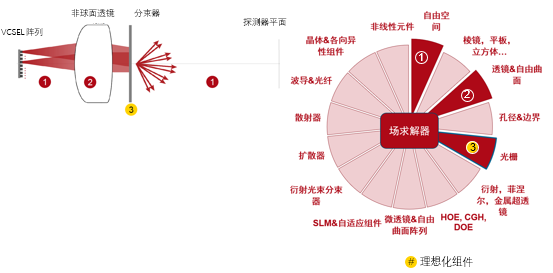
o3=S<��|�V 点阵投影仪是启用Apple Face ID的关键组件。 该
系统通常由发光单元阵列,
透镜和分束
光栅组成。 透镜系统与光栅一起投射,并复制阵列
光源图案。 在此示例中,我们构建了这种点阵投影仪系统并演示了其工作原理。为进行系统分析,我们使用VirtualLab Fusion进行
光线追迹和场追迹。
s]8J+8
<uO sr@�Xu�m�T 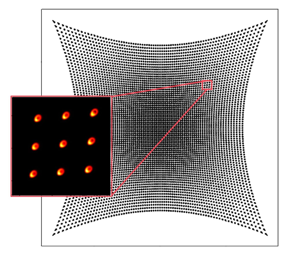 bnY8.Lpf|� 建模任务 8�lGg�p&ey <H@!�X�w;
bnY8.Lpf|� 建模任务 8�lGg�p&ey <H@!�X�w; 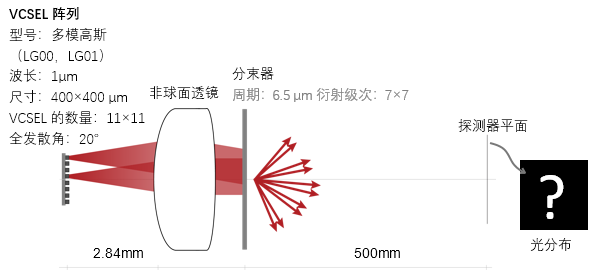 WC��l�;�#= �t�s�\>_�/
WC��l�;�#= �t�s�\>_�/ *文档中的非球面
镜片是使用ZemaxOpticStudio®设计的
-xgmc�-LGo +s��iNU#! 光源建模 ��[*ovYpj^ g�H//�
TbS 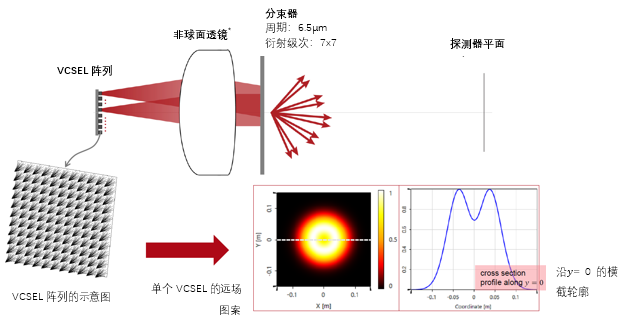 �
�mFoK76 B:#0B��[�� 轴上VCSEL单元的仿真 L=�w��Fo^N saf�S>wM]�
�
�mFoK76 B:#0B��[�� 轴上VCSEL单元的仿真 L=�w��Fo^N saf�S>wM]� 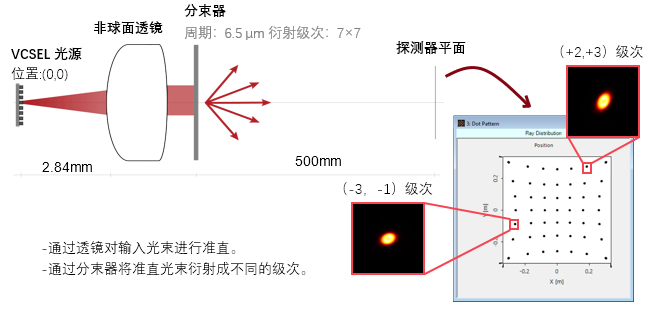 `/R�eJ�j&~
x ��Bw.M{ 离轴VCSEL单元的仿真 2LH;d`H�[0 )0d".Q|�v4
`/R�eJ�j&~
x ��Bw.M{ 离轴VCSEL单元的仿真 2LH;d`H�[0 )0d".Q|�v4 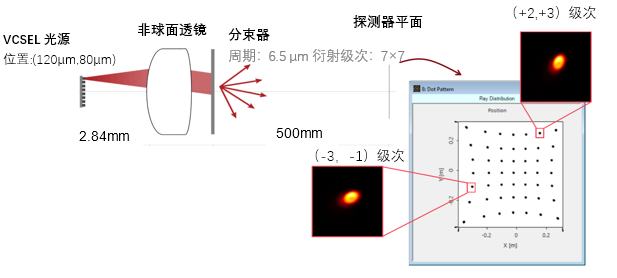 m:O2�_�%\l {!Z_�&�i5�
m:O2�_�%\l {!Z_�&�i5� -对于离轴VCSEL单元,
镜头对输入光进行准直,准直角度与光源模式的位置相关。
PjZvLK@a9) -因准直角度的关系,光斑图案相对于轴上情况有所偏移。
$hp�?5�K�M M &EJ�Fpc* 完整VCSEL阵列的仿真 7:q-Nz�E\6 ��d]~��1.i 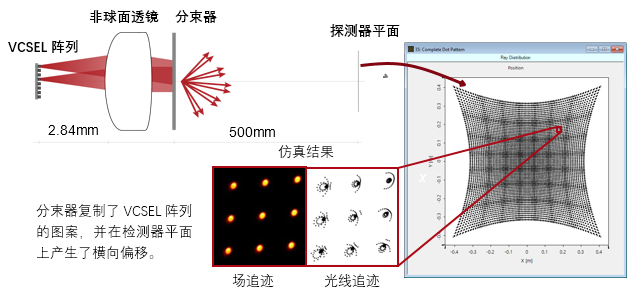 ���A�?k,}~ JU1; /��3( VirtualLab Fusion一瞥 Zw
8b
-�_� X&oy.�R�oo
���A�?k,}~ JU1; /��3( VirtualLab Fusion一瞥 Zw
8b
-�_� X&oy.�R�oo 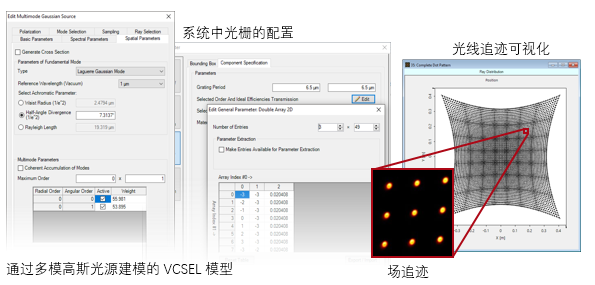 |8{�iIv�i/ '?�GZ�"C�2 VirtualLab Fusion中的工作流程 [�\n.[4gq" �.����+�o>
|8{�iIv�i/ '?�GZ�"C�2 VirtualLab Fusion中的工作流程 [�\n.[4gq" �.����+�o> •设置多模信号源
af�q
+;Sh� �u�N0fWj�] •设置组件的位置和方向
}4]x"DfIg [y;ZbfMP|o •在
光学系统内配置光栅组件
<U��`Nb) & \#7%%>p=O' •参数运行的配置
A?KKZ{P�l �1V$B^�/�_ q ��? T�I, 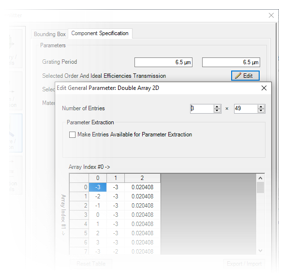 6v)��eM=
� >Mw =�}g@P VirtualLab Fusion技术 b�=\3N3O�X z�n$��Ld,�
6v)��eM=
� >Mw =�}g@P VirtualLab Fusion技术 b�=\3N3O�X z�n$��Ld,�