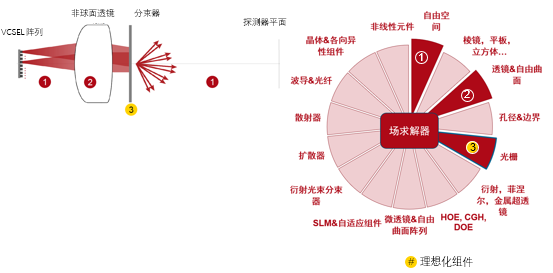
aAb��A)'�G 点阵投影仪是启用Apple Face ID的关键组件。 该
系统通常由发光单元阵列,
透镜和分束
光栅组成。 透镜系统与光栅一起投射,并复制阵列
光源图案。 在此示例中,我们构建了这种点阵投影仪系统并演示了其工作原理。为进行系统分析,我们使用VirtualLab Fusion进行
光线追迹和场追迹。
6J\ 2�=c`� )Q6�2��I\� 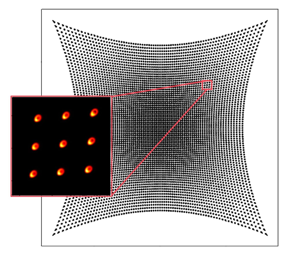 _9]vlxgtG( 建模任务 gD51N�()s, �u]Q}jqiq"
_9]vlxgtG( 建模任务 gD51N�()s, �u]Q}jqiq" 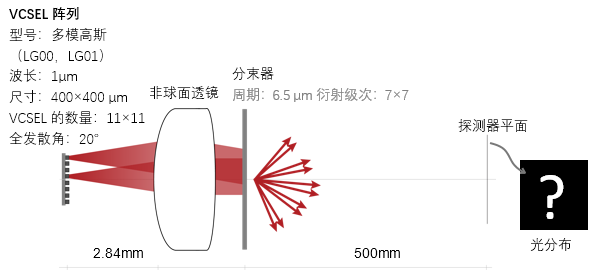 S6}�_N/;6~ 064�k;|>�D
S6}�_N/;6~ 064�k;|>�D *文档中的非球面
镜片是使用ZemaxOpticStudio®设计的
? )h8uf�4 �}`2a>N:
& 光源建模 zrqI^��i"c �$��OG){'X 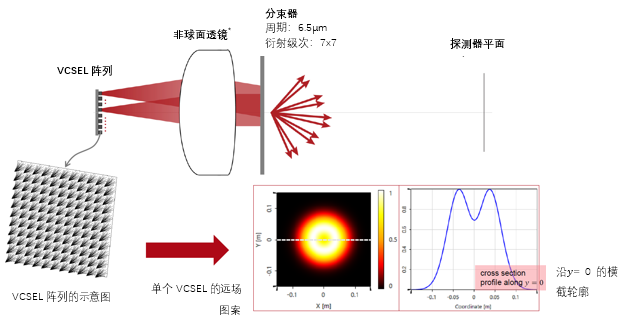 �4/%fpU2�� P�6Y+� �u� 轴上VCSEL单元的仿真 h
(q,T$7�W :._Igjj�$=
�4/%fpU2�� P�6Y+� �u� 轴上VCSEL单元的仿真 h
(q,T$7�W :._Igjj�$= 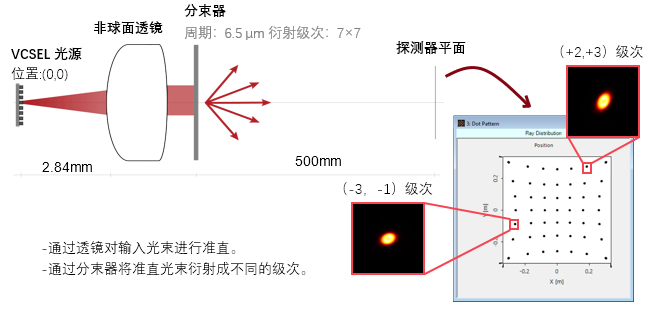 �
�?HR�S* er5!��n��e 离轴VCSEL单元的仿真 �qFK.ULgP` O�X��'V���
�
�?HR�S* er5!��n��e 离轴VCSEL单元的仿真 �qFK.ULgP` O�X��'V��� 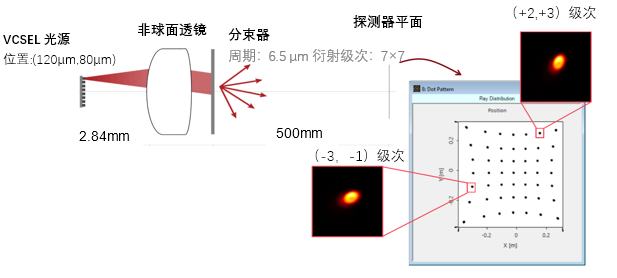 �J;N��Ia[a ��� �=����
�J;N��Ia[a ��� �=���� -对于离轴VCSEL单元,
镜头对输入光进行准直,准直角度与光源模式的位置相关。
5+�11�J[~{ -因准直角度的关系,光斑图案相对于轴上情况有所偏移。
yuy�\T(7BN ��]\�KVA)\ 完整VCSEL阵列的仿真 �V'e%%&g~N sQ3�4�0�!� 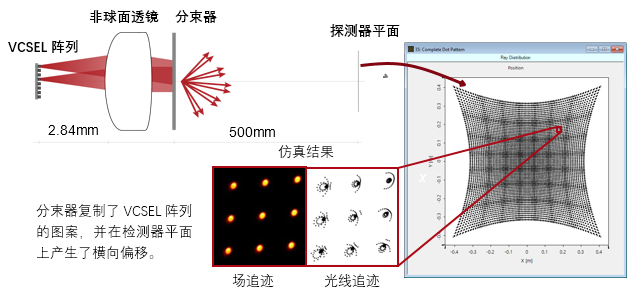 �A�
�yr�, QRv��ya��V VirtualLab Fusion一瞥 ��[Q{\I��k S't��9�F
�A�
�yr�, QRv��ya��V VirtualLab Fusion一瞥 ��[Q{\I��k S't��9�F 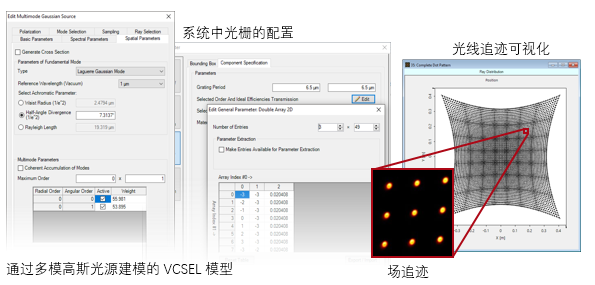 �YnuY�/zDF pHoHngyi& VirtualLab Fusion中的工作流程 �S9Oz�5�_x (D%v��N&�F
�YnuY�/zDF pHoHngyi& VirtualLab Fusion中的工作流程 �S9Oz�5�_x (D%v��N&�F •设置多模信号源
f�*<Vq:N=\ �-Uy)=]Zae •设置组件的位置和方向
�_�q�R?5;v >G8I X^*sG •在
光学系统内配置光栅组件
��� {ibu�0 haBmw�q(f� •参数运行的配置
{�j��9Tz�R J�{^md�0l o_`6oC"�s� 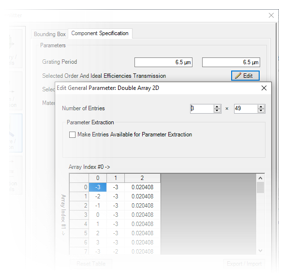 b6
%�m*~�� |,p"<a!+{w VirtualLab Fusion技术 {=�3A@�/vM {daX?�N|�V
b6
%�m*~�� |,p"<a!+{w VirtualLab Fusion技术 {=�3A@�/vM {daX?�N|�V