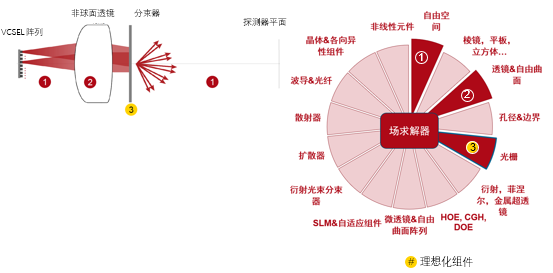
PC8Q"�O��� 点阵投影仪是启用Apple Face ID的关键组件。 该
系统通常由发光单元阵列,
透镜和分束
光栅组成。 透镜系统与光栅一起投射,并复制阵列
光源图案。 在此示例中,我们构建了这种点阵投影仪系统并演示了其工作原理。为进行系统分析,我们使用VirtualLab Fusion进行
光线追迹和场追迹。
"�(O>=F&� JH9J�5%�sp 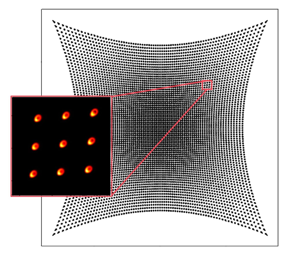 FVK��TbvYn 建模任务 + &Eq��k� �[9L:),&u
FVK��TbvYn 建模任务 + &Eq��k� �[9L:),&u
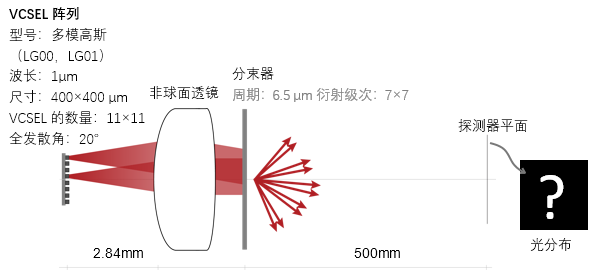 &p@O��_0nF ~<bZ1�TD �
&p@O��_0nF ~<bZ1�TD � *文档中的非球面
镜片是使用ZemaxOpticStudio®设计的
wn%A4-%�{ �~36!?&eA8 光源建模 1GcE)��e!> �g��!�|kp? 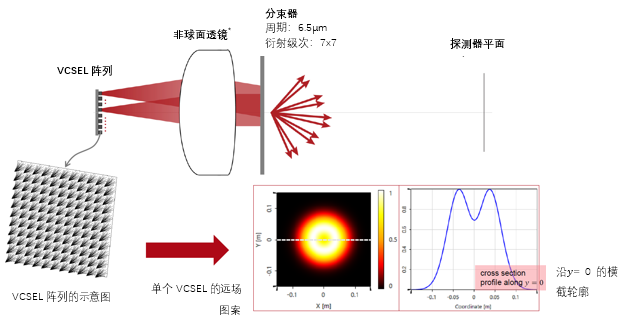 Q)h(nbbVak %tG�O?JMkd 轴上VCSEL单元的仿真 $U�W�ZD�D� �oG\��Vxg*
Q)h(nbbVak %tG�O?JMkd 轴上VCSEL单元的仿真 $U�W�ZD�D� �oG\��Vxg* 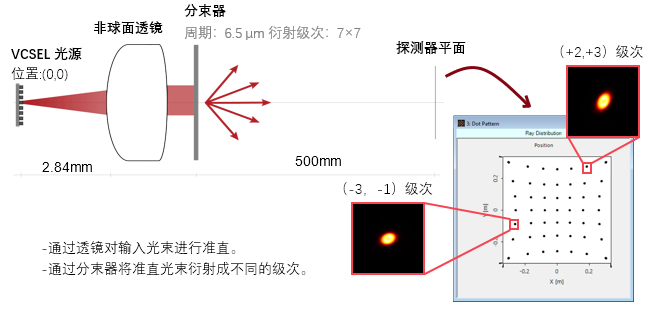 r,p%U!S<hV S,U��Dezxg 离轴VCSEL单元的仿真 "!^�"[�mX4 I\ob7X'Xu!
r,p%U!S<hV S,U��Dezxg 离轴VCSEL单元的仿真 "!^�"[�mX4 I\ob7X'Xu! 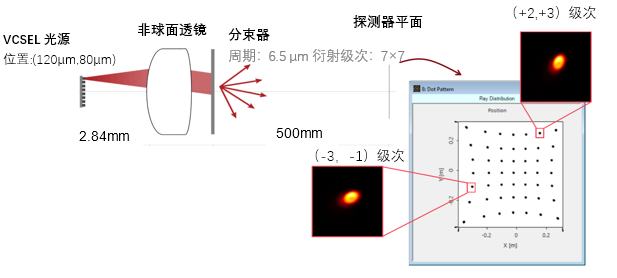 A;�M'LM-�M _Fl�9>C"u�
A;�M'LM-�M _Fl�9>C"u� -对于离轴VCSEL单元,
镜头对输入光进行准直,准直角度与光源模式的位置相关。
^0�9,"�<@k -因准直角度的关系,光斑图案相对于轴上情况有所偏移。
Y$��_�B�1_ )�Aqtew+A& 完整VCSEL阵列的仿真 D�vvK^+-~� 8l`*]�1.W< 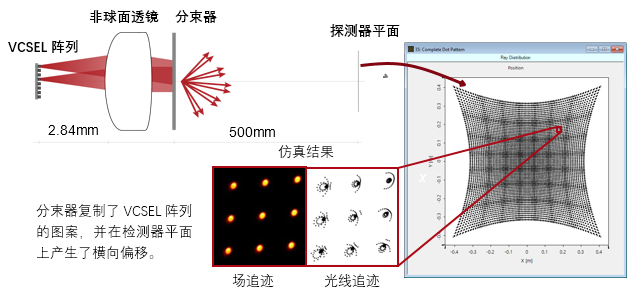 q�2�E�_��A � qX{+oy�5 VirtualLab Fusion一瞥 ��VI86K�Ju s��O@T�f\d
q�2�E�_��A � qX{+oy�5 VirtualLab Fusion一瞥 ��VI86K�Ju s��O@T�f\d 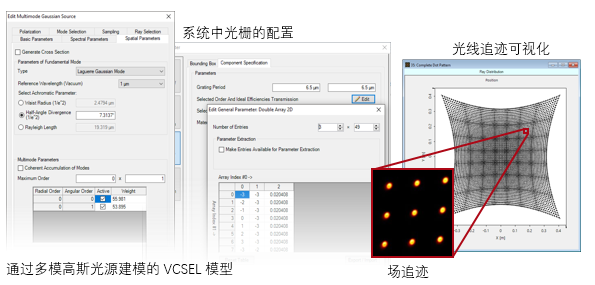 �n:��!���_ �"chDg(jMZ VirtualLab Fusion中的工作流程 {P�_.~0pc* ?�e� �4/�p
�n:��!���_ �"chDg(jMZ VirtualLab Fusion中的工作流程 {P�_.~0pc* ?�e� �4/�p •设置多模信号源
?Uo����BV$ R\[e!g*I�� •设置组件的位置和方向
c^W)07-X5y �j�\M?~=*w •在
光学系统内配置光栅组件
z�2G�Y�:<s G 3ptx!
D� •参数运行的配置
gc��T%c|�. s�$j,9u�Rr +�I28|*K�" 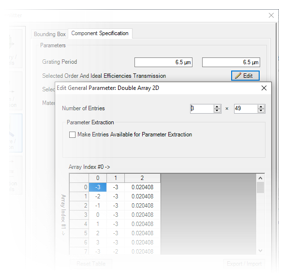 P&�V�v��/D d2$IH#~9�B VirtualLab Fusion技术 �#H�~6�4/� s�~X%Y<�9l
P&�V�v��/D d2$IH#~9�B VirtualLab Fusion技术 �#H�~6�4/� s�~X%Y<�9l