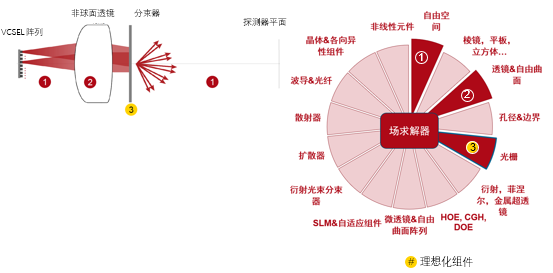
l0|5t)�jF- 点阵投影仪是启用Apple Face ID的关键组件。 该
系统通常由发光单元阵列,
透镜和分束
光栅组成。 透镜系统与光栅一起投射,并复制阵列
光源图案。 在此示例中,我们构建了这种点阵投影仪系统并演示了其工作原理。为进行系统分析,我们使用VirtualLab Fusion进行
光线追迹和场追迹。
5?�f ^�R�z 3(��>B� Ke 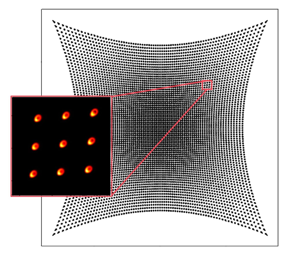 ^}���RCo�E 建模任务 �/T"+KU*� t*p71U�4+I
^}���RCo�E 建模任务 �/T"+KU*� t*p71U�4+I 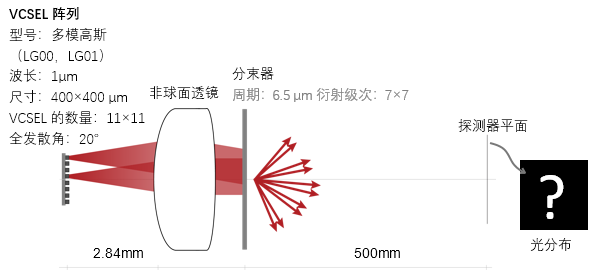 p?�02C#��p lov!o:��dJ
p?�02C#��p lov!o:��dJ *文档中的非球面
镜片是使用ZemaxOpticStudio®设计的
$�zU�P?Gq! Ke�w�@�&j~ 光源建模 f[]dfLS�"W ?��>VLTp8] 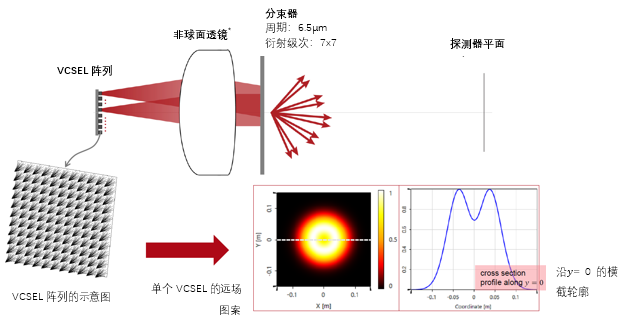 ��x'8x�
�� �
{y�)=eX9 轴上VCSEL单元的仿真 ]}V�<�*f� U�gr!�"Q#M
��x'8x�
�� �
{y�)=eX9 轴上VCSEL单元的仿真 ]}V�<�*f� U�gr!�"Q#M 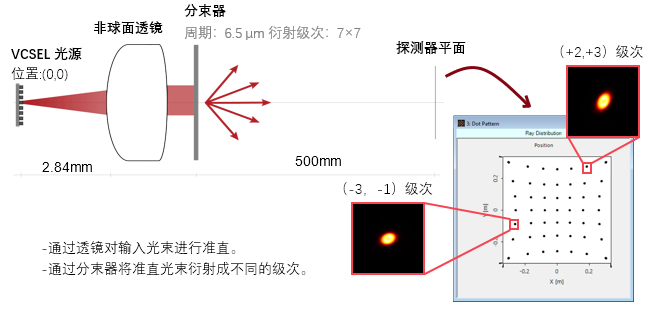 =7?�4eY�HC ?�al'F�� q 离轴VCSEL单元的仿真 ���k�o�!)s 1a/++�4O.|
=7?�4eY�HC ?�al'F�� q 离轴VCSEL单元的仿真 ���k�o�!)s 1a/++�4O.| 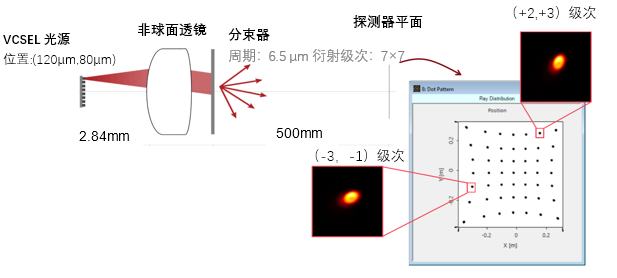 ?�w$�ku�e ��v_��yw�@
?�w$�ku�e ��v_��yw�@ -对于离轴VCSEL单元,
镜头对输入光进行准直,准直角度与光源模式的位置相关。
�%U/(|wodd -因准直角度的关系,光斑图案相对于轴上情况有所偏移。
,>:�U�2%� (O\�)_#-D� 完整VCSEL阵列的仿真 <;lkUU(WT2 \UA��[���� 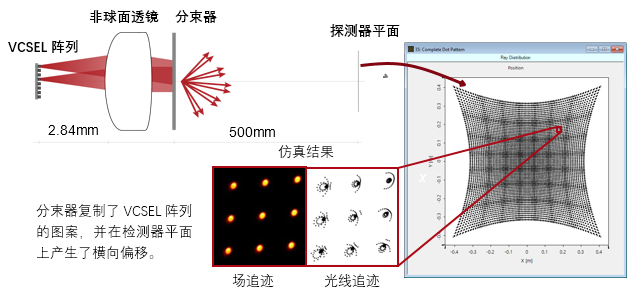 �Xu{1".\�� q9B�$"��n� VirtualLab Fusion一瞥 aHD]k8�m z F�w_#N6�Q�
�Xu{1".\�� q9B�$"��n� VirtualLab Fusion一瞥 aHD]k8�m z F�w_#N6�Q� 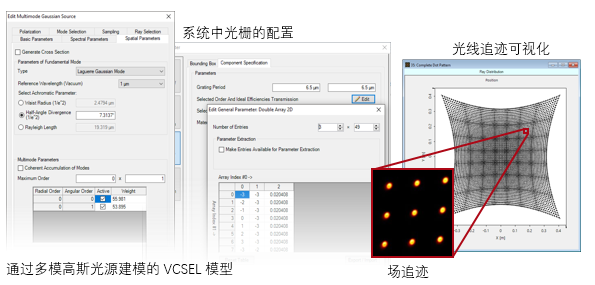 �59L�G{R�2 [Dutt�FX^x VirtualLab Fusion中的工作流程 jV��i) Efy {�$oj.V 4
�59L�G{R�2 [Dutt�FX^x VirtualLab Fusion中的工作流程 jV��i) Efy {�$oj.V 4 •设置多模信号源
vz&�|�J
�� _T6�0;ZI+^ •设置组件的位置和方向
�(&�r.���w �H8�=��N@l •在
光学系统内配置光栅组件
/l3V3��B7� ���-abt:or •参数运行的配置
nkPh,X\N�0 dRY�qr}!%n KM��,����\ 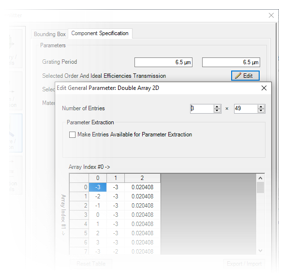 �Z{*\S0^ST 10Q �]�67� VirtualLab Fusion技术 p%ki>p )E| PI {�bmZ�
�Z{*\S0^ST 10Q �]�67� VirtualLab Fusion技术 p%ki>p )E| PI {�bmZ�