X光
成像通常基于Talbot效应和
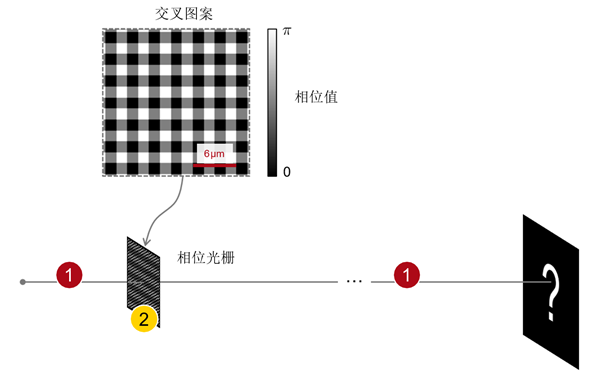
光栅的自成像。 遵循N. Morimoto等人的工作,我们选择了三种类型的相位光栅,分别是交叉型,棋盘形和网格图案。 在本案例中,光栅被用于单光栅
干涉仪中,建模为仅相位透射
函数(因为X射线
波长远小于光栅周期),并在
VirtualLab Fusion中我们还检查了其自成像。
�" %)zT��H N6BFs���(  Gf{FFIe�( :b_R1ZV|
建模任务 ���$|yO
mh
Gf{FFIe�( :b_R1ZV|
建模任务 ���$|yO
mh 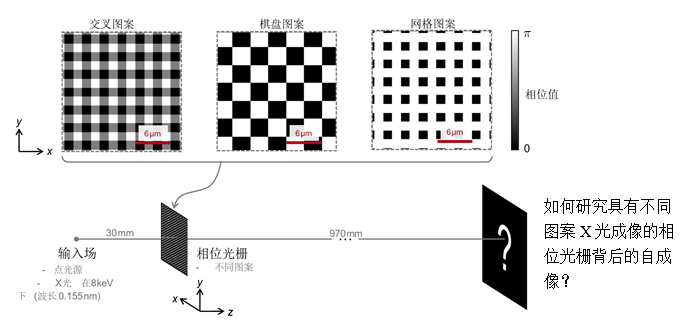 s1e�GItx[w 系统参数
s1e�GItx[w 系统参数来自 N. Morimoto, et al., Opt. Express 23, 29399-29412 (2015)
y-iu�Ozq4
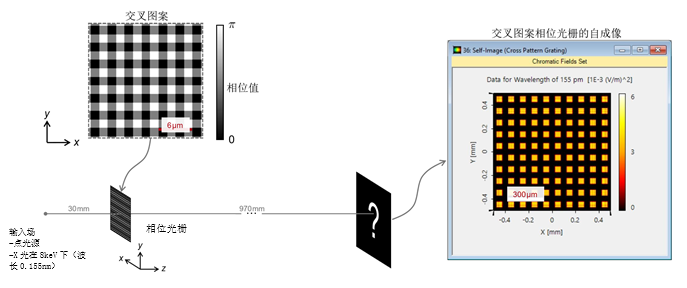
Iv5�agh%� 交叉图案相位光栅系统参数来自 N. Morimoto, et al., Opt. Express 23, 29399-29412 (2015)
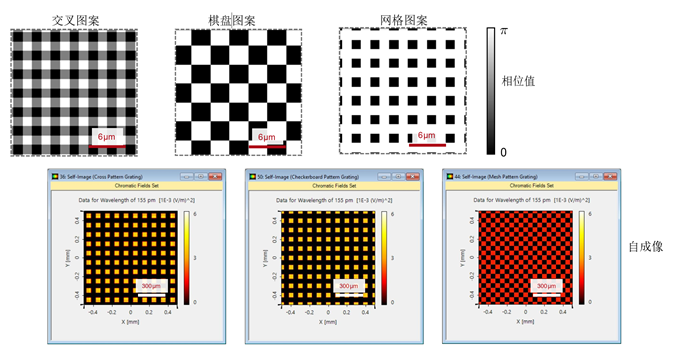
1�$g�]&'�� _XqD3�?yH4 交叉图案相位光栅 =f�Z)��2q
M�Qv2C@K9F
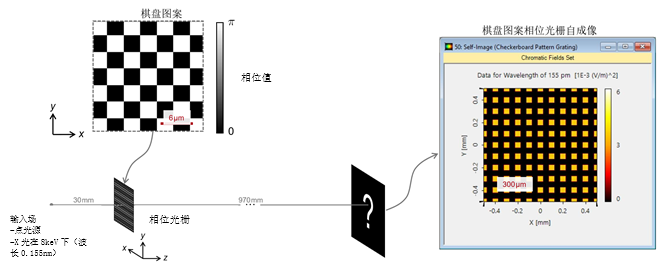
 D<�2|�&xaR 棋盘图案相位光栅 cH!w;U�b�]
D<�2|�&xaR 棋盘图案相位光栅 cH!w;U�b�]
>dW~o_u'QN
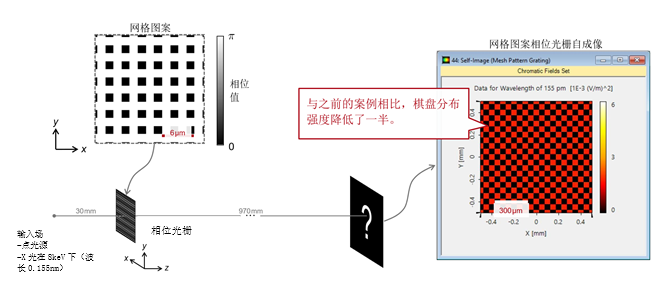
 $0MP*T�FWa ? }�2]G'7? 网格图案相位光栅 D�`b��H_1X
$0MP*T�FWa ? }�2]G'7? 网格图案相位光栅 D�`b��H_1X
�5)MVkJ=R�
 P7W�s$7x�� J��\@yP��� 不同案例对比 b�uR�K�\�C
P7W�s$7x�� J��\@yP��� 不同案例对比 b�uR�K�\�C
|lij�n��fp
 �� O�BY��� ��t�Dl1UX 走进VirtualLab Fusion ;�n�Pjyu'g
�� O�BY��� ��t�Dl1UX 走进VirtualLab Fusion ;�n�Pjyu'g
'o#ve72z1�
 ?
D�?Xa�Rb *�k(>Qsb " VirtualLab Fusion工作流程 n�SL
x�1Q |X6�]#&g7�
?
D�?Xa�Rb *�k(>Qsb " VirtualLab Fusion工作流程 n�SL
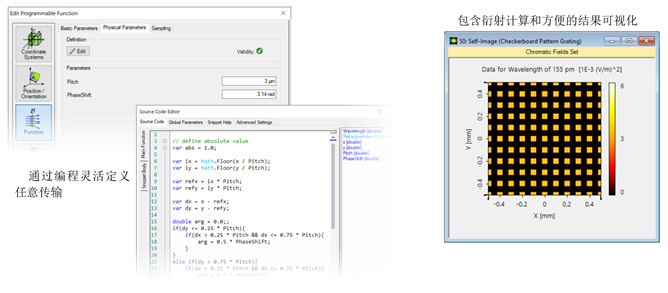
x�1Q |X6�]#&g7� •指定或自定义透射函数
hYS�*J9�08 ��/�OpVr15 •选择合适的
探测器进行光场可视化
�DJv;ed%�x −电磁场探测器[用例]
=jX'FNv# •设置恰当的傅立叶变换
.I�@jt�?6X fBp�tj�t_� <�xm>_~,w 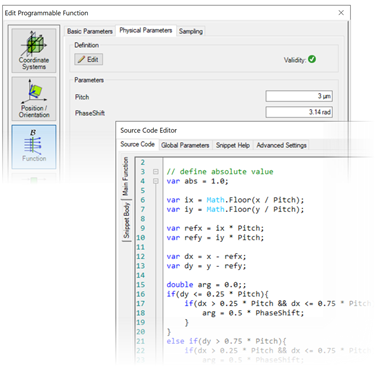 YJlpP0;++� :n�:Gr�?�� VirtualLab Fusion技术 (b�Ig6_U7\
YJlpP0;++� :n�:Gr�?�� VirtualLab Fusion技术 (b�Ig6_U7\
�c8cV{}7Kb
 3@r_t|��j
3@r_t|��j
 C�V~�\xYY�
C�V~�\xYY�



