X光
成像通常基于Talbot效应和
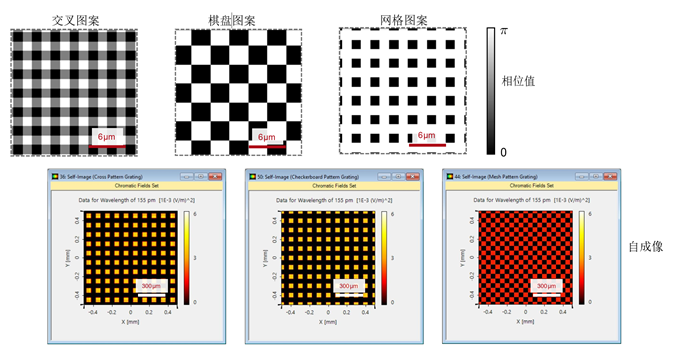
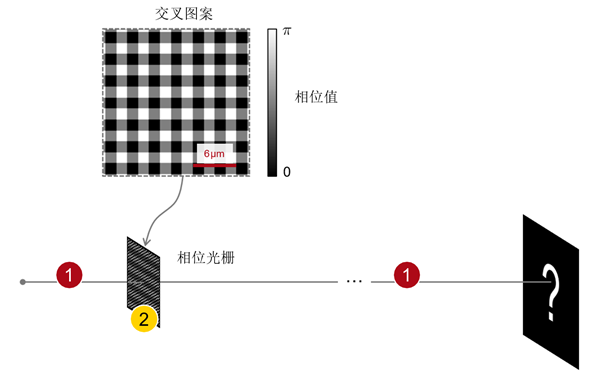
光栅的自成像。 遵循N. Morimoto等人的工作,我们选择了三种类型的相位光栅,分别是交叉型,棋盘形和网格图案。 在本案例中,光栅被用于单光栅
干涉仪中,建模为仅相位透射
函数(因为X射线
波长远小于光栅周期),并在
VirtualLab Fusion中我们还检查了其自成像。
aB*Bz]5;E �q
VjdOY:z  +cD<:"L'�g \6S7T$$ 1m 建模任务 ��6� �+Sxr
+cD<:"L'�g \6S7T$$ 1m 建模任务 ��6� �+Sxr 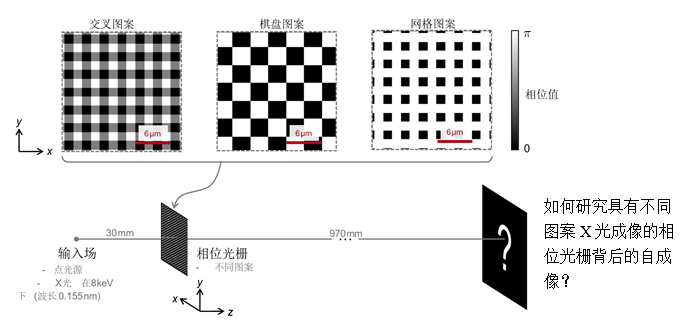 V8�e>�l[tH 系统参数
V8�e>�l[tH 系统参数来自 N. Morimoto, et al., Opt. Express 23, 29399-29412 (2015)
Kh"?%ZI�a�
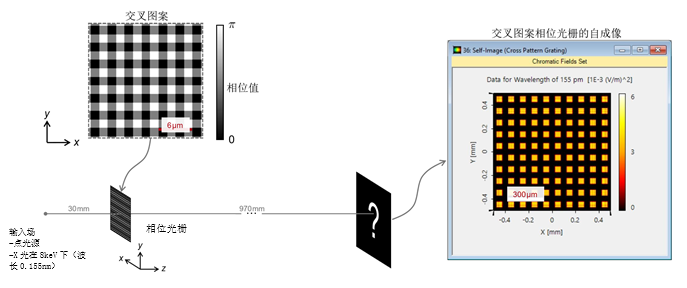
jG6]A"��pr 交叉图案相位光栅系统参数来自 N. Morimoto, et al., Opt. Express 23, 29399-29412 (2015)
Z_P�NI#h*� :lX!�\(�E2 交叉图案相位光栅 �h�v)x=�e<
@�+;$jRwq�
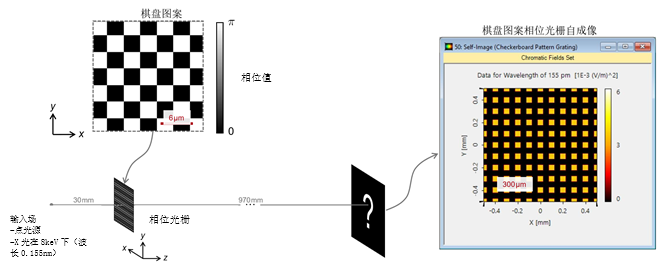
 _U�$<xVnP� 棋盘图案相位光栅 �5�uGq��X"
_U�$<xVnP� 棋盘图案相位光栅 �5�uGq��X"
�#c!�*</�
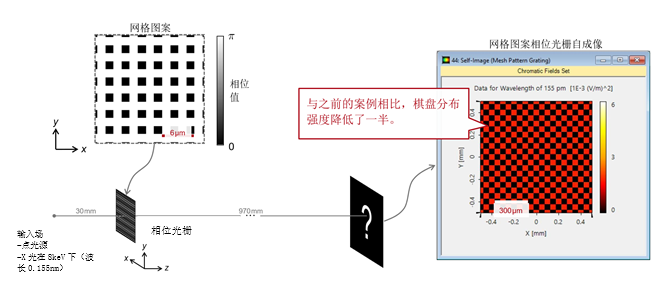
 �z(o,m3@v� -B>�++r2A^ 网格图案相位光栅 7@#�>b�E�6
�z(o,m3@v� -B>�++r2A^ 网格图案相位光栅 7@#�>b�E�6
MV!�{j;g1<
 YSs)�HV.�8 !*�/*�8r�e 不同案例对比 �\Lq h ��j
YSs)�HV.�8 !*�/*�8r�e 不同案例对比 �\Lq h ��j
lackB2J9 A
 [N� FFB�96 h~A/�y!�s 走进VirtualLab Fusion sI�43@[��
[N� FFB�96 h~A/�y!�s 走进VirtualLab Fusion sI�43@[��
�:KH g&ZX7
 ?J'���Y��& �/xG*,YL/q VirtualLab Fusion工作流程 O7�u(}$D
L 2�;�xIL��]
?J'���Y��& �/xG*,YL/q VirtualLab Fusion工作流程 O7�u(}$D
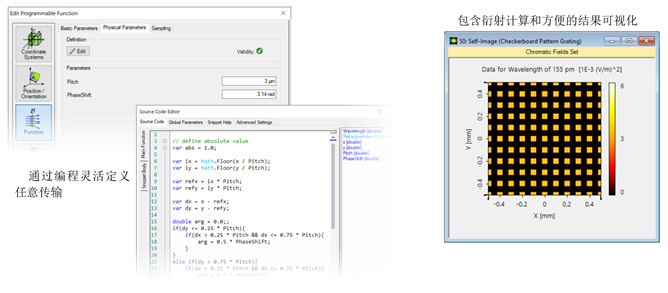
L 2�;�xIL��] •指定或自定义透射函数
�`�+�`Z�7� �'�#!
g�h? •选择合适的
探测器进行光场可视化
���"�B8Q�: −电磁场探测器[用例]
K�*\'�.~[6 •设置恰当的傅立叶变换
3�sc�+3-TF c@YI;HS_�g �::�o �lN� 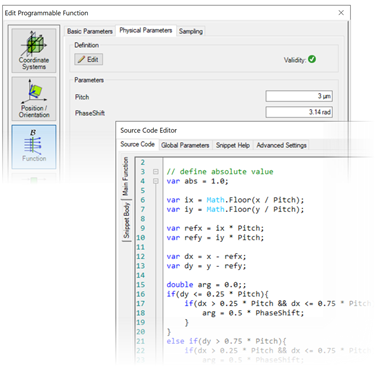 )�Z���[ft M\C"5%2M�u VirtualLab Fusion技术 \:R%4�w#Jv
)�Z���[ft M\C"5%2M�u VirtualLab Fusion技术 \:R%4�w#Jv
=6xrfDbN�8
 >�PB4�L_1�
>�PB4�L_1�
 ?��xK�8�#�
?��xK�8�#�



