1. 描述 ��wZJbI[r ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 \�hEIQjfi� ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 1U�^KN�~!� ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 @�Cx�go�X^
�#W.vX=/�* 2. 系统 rz`"$��g+# ~�4�t�wI*f 文件名:UseCase.0082_FocussingSystem.lpd
xo�GrXt9�& 3. 透镜系统组件编辑 ��y!�rJ�}e
p*T[�(\8{n
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 5:5�d�=7WX
■ 透镜系统是由序列光学表面(OIS)定义的。 %]�4=D)O�m
■ 每一个可选项都有独立的参数,并可以设定。 u]��`0QxvZ
■ 包括序列光学表面和光学介质。 %BT]h3dcSS
C(�z�'oi:f tJ8:S�@E3, 4. 光线追迹系统分析器-选项 g�q4X(rsyD to1r
8�8X� s%>8y\MaK�
■ 分析器允许用户指定使用光源的光线选项。 �\����!w |
■ 可以选择选取光线的方法: P*�U^,Jh�<
— 在x-y-网格 >M#�#q?�.�
— 六边形 >�pJ��#�b=
— 自由选取 KDV.�ZSF7�
■ 每一个可选项都有独立的参数,并可以设定。 �7[K3kUm[� jP�2�#w{xq 5. 系统的3维视图 T5I#�7LN#� �5Fj9.K~�k 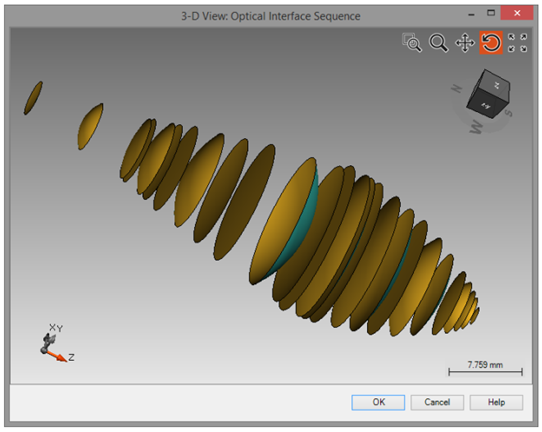 1A#/70Mo��
1A#/70Mo�� 光线经过整个光学系统的三维视图
xdz 6[8�d8 光线经过整个光学系统的三维视图(局部放大)
f5�{|_�]q] loE;�q}��^ )^��"V}z
t Aho*E9VW� _IV!9 JL � 0M&�~;�`W} 8. 透镜系统后虚拟屏的结果 $d�4&�H/u^ F�+�� �RE� Br42Qo2"T>
■ VirtualLab可用于计算点列图。 X�%N�!�gy�
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 �~�F-�lO�1
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 C�F\wR;6k�
■ 你可以通过下面的操作将背景颜色该为白色 ��D&G?�Klq
��D&G?�Klq
�~�ISY(� & 9. 焦平面上的结果 7�s���We32
v<<�ATs%�w
�FU��J<gqL
■ 在左侧图片中可以看到焦平面上计算出的点列图。 %4V$')rek
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 o~L(;�A]yN
■ 焦平面上的光斑尺寸为183mm `�����g�)
■ 此外,背景颜色也可以预先设置。 H��Vh�d#Q;
■ 该测量采用均方根(RMS)计算法。 ��u?�g&(h� �^w��"hA; 10. 总结 �c�R�,'�aX ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 so/0f1R?~� ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 !�>=lah�$& ■ 此外,系统可以直接利用光线追迹引擎进行分析。 gu�~R4��@3 ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 mW��+5I-~�
mW��+5I-~�


