示例.0080(1.0) J/k4CV*li(
lj� �US�-6 关键词:光线追迹,镜头,优化,曲率半径,设计 �Z@ dS�,M*
1m{c8Z.h/d 1.描述 "KHe6otmi_
/Evnw�Y�Qy ▷ 在该示例中,我们介绍了如何利用VirtualLab软件中的光线追迹引进行参数优化。 LLV1W0VO=P ▷ 在此示例中,对一个球面透镜进行优化,使其在透镜后指定的距离上生成聚焦光斑。 �K%@#a}kRb ▷ 球面镜的光学界面的曲率半径被设计为自由变量。 T/Bx3VWL�
�0l'"i�dra 2.系统光路图及系统配置 Q2LAXTF]y�
m=�#<����� 文件名:UseCase.0080_ParametricOptimizationWithRayTracing.lpd k:yrh:Jh�B m�\"X�%Y#� ▷ 该光学系统由球面波照射一个球面透镜组成。 @-%��.+��� ▷ 通过设计,使透镜的焦点位于透镜后50mm的位置。 ]�vQU(�@+I ▷ 在目标平面处,利用光束尺寸探测器计算光斑的大小。 4�yDW�Vd;� ▷ 光束尺寸探测器提供了几个选项,包括利用光线追迹引擎评估光斑的大小。 �E]g�y5�y� ▷ 用户可以选择测量方法(RMS或峰值)进行计算,也可以附加参数。 �s~b!3l`gu 光束尺寸探测器参数窗口 3bK=Q�3N��
3.初始系统的光线追迹结果(3D) 5uAUi=XA>S j�Q�X9KwSP 选择光线追迹系统分析器,点击Go!
初始系统光线追迹结果
f1ww�x|b%. 4.参数优化的生成 6x�W1��7P XJg�uw/[wm 3f)!RKS9�q 5.设置参数优化 !�4"<�:tSO
�j\%m6\{n| 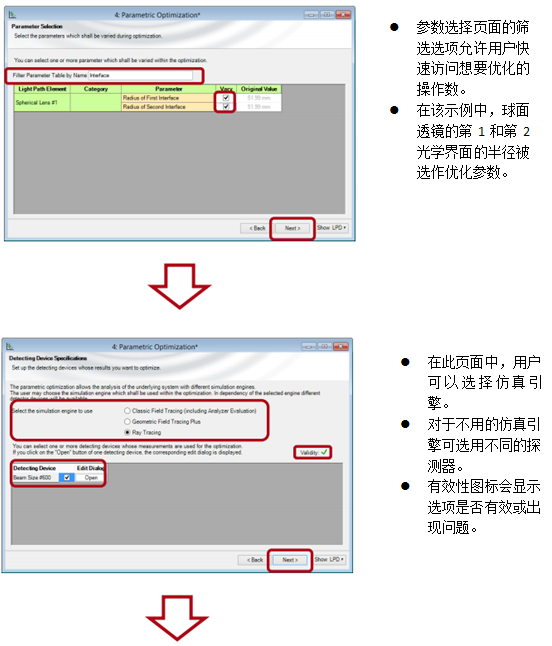 �"t�Uc��
�"t�Uc��
�IuOQ���X}
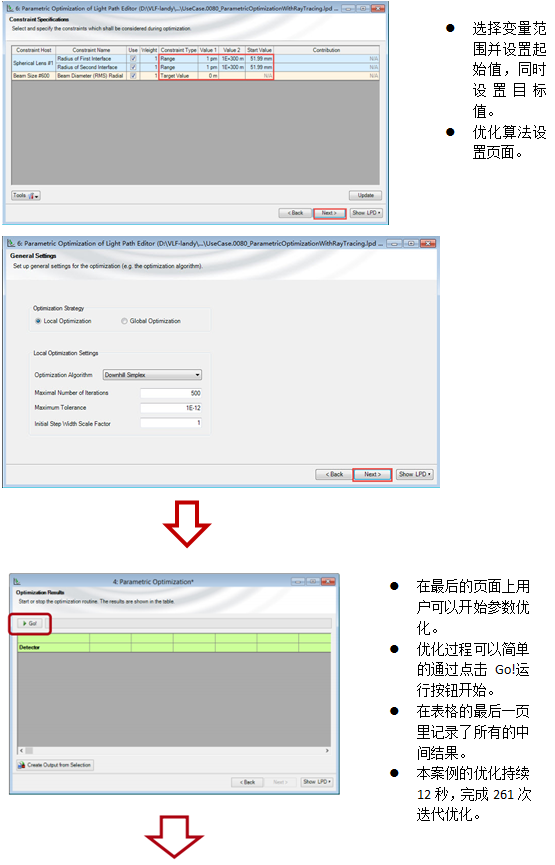
3�IYbg�UG PESJ7/�^E 优化结果页面,选择“显示优化后的光路图”(”Show Optimized LPD”)可以获得优化后的光路图 :��}+m�[g
F� m$;p6&j 7.优化后系统的透镜参数 �,�&aD�
�U 2�`cV�i"�U 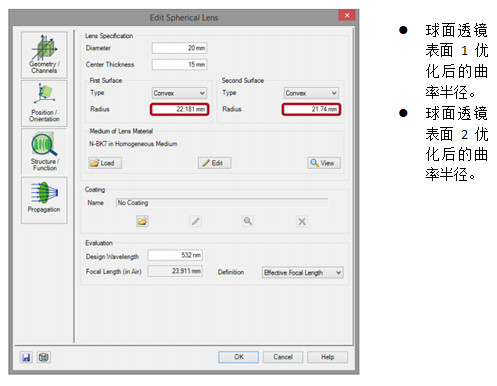 �'ql�WDt/�
�'ql�WDt/� 通过使用光线追迹系统器(Ray Tracing System Analyzer)获得光线追迹三维结果 wg�{Y6X�yH
9.总结 U\`yLsKvH`
F9�4Qb���} ▷ VirtualLab Fusion可以用来完成光学系统的光线追迹仿真。 mP�+rP�DGp ▷ VirtualLab提供了三维光线追迹和二维光线追迹(点列图生成及自定义评价函数)。 t�Rzo}_+N� ▷ 在VirtualLab的参数优化过程中所有的引擎模块都可用。 QMBV"�E_aY ▷ 通过一个参数的优化可以利用光线追迹完成对光学系统的优化。 �Ku<�_N]9� ▷ 可以使用不同的优化算法。 V~ [I �/Vi E?^A+)<" �
=�:pN8�2.G QQ:2987619807 I.L8A|�nZ�



