示例.0082(1.0) �>T^BD'z@' A_5M��\iN\ 关键词:光线追迹,高数值孔径,点列图,光斑尺寸 V�%FWZn��^
�]"\�s�d"� 1. 描述 �g'.(�te | ■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 j$�z!k�d+% ■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 ):5H,B+Vr& ■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 PD:lI�]�:s
x��J\>;$CY 2. 系统 4Z��T0~37( �oUN;��u*
文件名:UseCase.0082_FocussingSystem.lpd
G"*c�h��$: 3. 透镜系统组件编辑 -Vj�r�h/�@
���6CNxb��
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 ��}�FC(Z-g
■ 透镜系统是由序列光学表面(OIS)定义的。 ?]58{O(�?c
■ 每一个可选项都有独立的参数,并可以设定。 ���'77Gg�
■ 包括序列光学表面和光学介质。 "!PN�+�gB�
z?C&�,m�v� I@I-�QiI�� 4. 光线追迹系统分析器-选项 7JL�jA\k�� ">�Y�(0^�^ \7��*"M y*
■ 分析器允许用户指定使用光源的光线选项。 e/<'HM� �T
■ 可以选择选取光线的方法: �p+xjYU4^C
— 在x-y-网格 �j�\uPOn8k
— 六边形 Uc�]s�W�cR
— 自由选取 ""_%u'7t5I
■ 每一个可选项都有独立的参数,并可以设定。 &���M�P �+ |�@p�n=wW� 5. 系统的3维视图 �RJ$x�{$r[ !<4��=�@�� 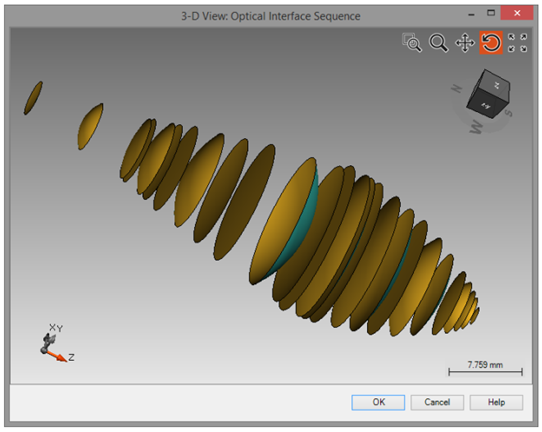 H>�|*D~RdT
H>�|*D~RdT 光线经过整个光学系统的三维视图
_{y4�N��0 光线经过整个光学系统的三维视图(局部放大)
�M I�R))j; y"Jma�`Vjq g I@�I.�=y qn�TW?c9Z5 �3mLtnRX[m �eBg:[4�4V 8. 透镜系统后虚拟屏的结果 :o�}LJ�c)| rFG_�C��C2 }"6
PM)s�
■ VirtualLab可用于计算点列图。 yFjjpEpnFt
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 �Y]:�Ch (Q
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 ,�O�1/|Y��
■ 你可以通过下面的操作将背景颜色该为白色 ^�y<8�&ZFH
^�y<8�&ZFH
)wfqGkr=m! 9. 焦平面上的结果 O
<"\G!y�~
��9<-7AN}Z
�,p9>/)�l
■ 在左侧图片中可以看到焦平面上计算出的点列图。 ��! ^TCe8�
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 6�~!�l7HqO
■ 焦平面上的光斑尺寸为183mm H�.*��aVb$
■ 此外,背景颜色也可以预先设置。 �Xy�wsjeI4
■ 该测量采用均方根(RMS)计算法。 P,={ �C6�* Y3?�)*kz�% 10. 总结 �xw~�3�x*{ ■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 �L_Lhmtm}m ■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 �G�VUZn// ■ 此外,系统可以直接利用光线追迹引擎进行分析。 �p\ �_��&� ■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 3u~V&��jl
)�6:1`&6�
#Mrc!pT]xy QQ:2987619807 4�~J��g\@


