-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-17
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
激光扫描系统(LSC.0002 v1.0) e�fui�F�N; 7%&e4�'SZO
应用案例概述 [ �{HTGz@( T�+S\��'f\ 系统细节 ��C~^T=IP� �)`��S5>[6 光源 <<V"4�� C2 – 绿光二极管 ^F-��2t�c� 元件 �(,�|eE�)+ – 双轴振镜扫描仪 ~+,ZD)AKi4 – F-Theta物镜 '�+�GY6Ecg 探测器 �H��G)�$�W – 场曲和畸变探测器 �,Y16m{<eC – 光束强度剖面探测器 �"Bz#5kqnl – 焦点区域探测器 :H#D4O8UiH – 光束参数探测器 c�E�n|�Q�� 模拟/设计 GnC�s_[*&r – 光线追迹:分析扫描场尺寸,场曲以及畸变 ��L=.�@h�s – 场追迹:考虑衍射效应,进行更精确的光束尺寸和剖面的研究 9{�rE7OX*A �_n4�_;0� 系统说明 ;�kZJnN�"y mR���t/��d ��MwL�!2r� 激光扫描系统的性能评估 )TBm�?�VMe xZ* B}O{{H 一个激光扫描系统的扫描光学部分包含了一个扫描仪单元和一个F-Theta物镜,在一维扫描过程中(沿入射角Theta),通过分析光束的场曲和畸变来评估其性能。 o5YL_=�7m� 此外,计算了不同扫描位置处的光束尺寸和轮廓。 I�]42R;S�c ^W�`RBrJay 模拟和设计结果 -���a����l �o=�PW)37> 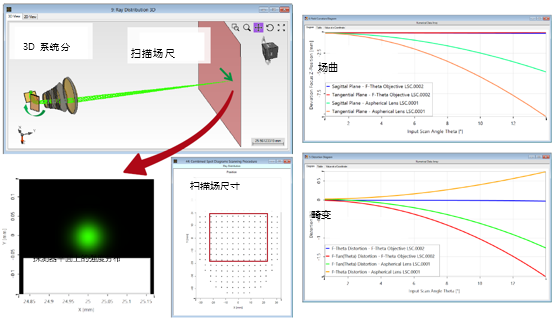 'j?�H�>'t{ 'j?�H�>'t{
�vbtjPs�e� 在此案例中,你将从以下选择的特征中获益: >�.�H}�(!� 各种探测器 "*S�_w�N% - 测量与反射镜扫描角度相关的焦点位置 �7W+{U0�2O - 测量探测器平面上的光束位置 �X_�)I�"` - 使用焦点区域探测器计算焦点区域中的场 ks,d4b=-�> 参数耦合 p^Z|$�aZZ - 针对扫描光学部分的期望输入扫描角度Theta来调整反射镜方位 :.f�(�}sCS 参数运行 Bs�k�` ��e - 估计扫描场尺寸 �`=kiqF2P} - 生成场曲和畸变图 L���-m�'
# "*TP@X�?@f 总结 gt�=@v())
twt's,�dO VirtualLab可以 ��1uE��M;O 模拟一个由双轴扫描反射镜和一个F-Theta物镜构成的激光扫描系统 p� _2Y�c]8 分析目标平面上的光束偏转 V0*MY{x#S - 通过光线追迹来计算扫描场尺寸,场曲和畸变 �|`�|zo+aW - 通过几何场追迹来计算光束剖面 :OqEkh"$# - 场追迹可以更准确地分析光束位置和焦点 P%d3fFz�K� 应用案例详述 @y��6��^/' �1suP7o A; 系统参数 .3wx}�!:*| |����Qpd<L 应用案例内容 .3>�q��3sS LSC.0001和LSC.0002为激光扫描系统。 TxK�N�Du�
在这个案例中,通过模拟扫描过程来分析F-Theta物镜的场区和畸变。 Yf1%�7+V35 相对于LSC.0001,显示了性能提高。 9)n3f^,Oj* 强烈建议首先阅读LSC.0001。 C�d_H<8_�_ 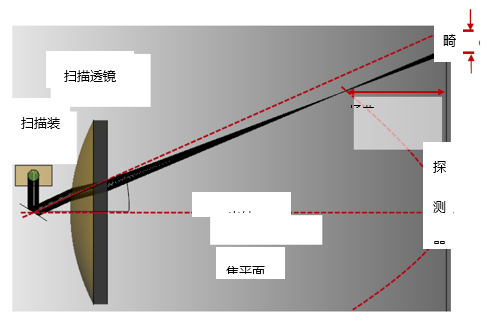 @�Y ?�p�-& @�Y ?�p�-&
B��"`86�qc
连续激光模 3GM�rd�G?Y TXbi>t:/S{ 规格:输入激光光束 x���4`|��[ oHF�,�k��� 激光组件中的单模二极管激光器 a4]=4[(iu> �&����G�m3 规格:电流反射镜定位系统 /8,�cF7XL*
%�wGQ�u;re
 82�1
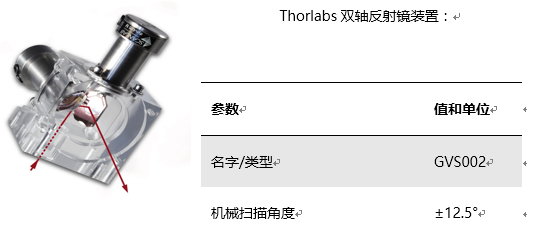
�6_Qm 典型双轴振镜扫描仪 M?DXCsZ,)s 82�1
�6_Qm 典型双轴振镜扫描仪 M?DXCsZ,)s
?}S~cgL� -
a,:�N�l�r3 规格:F-Theta物镜概述 ��/<J5?H��
R0nUS<��b0 qy-Hv6�oof 规格:F-Theta对象透镜参数 Q���.V+s � �q�1A0-W#4 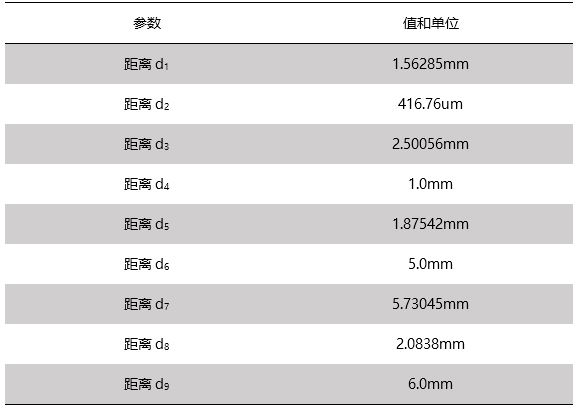 kZc�G�e*� kZc�G�e*� 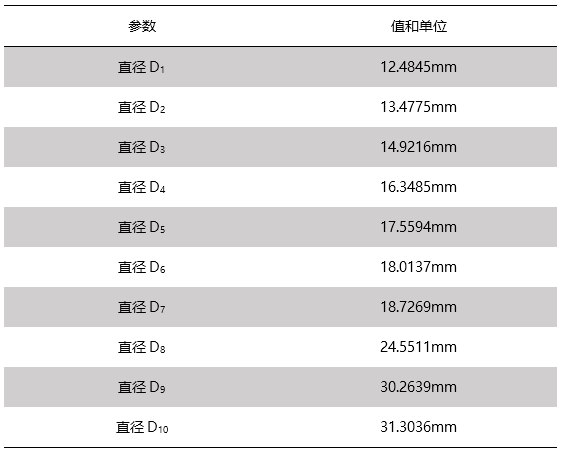 MEtKF�C|�p MEtKF�C|�p
来自目录Schott_2014 Lp+?5Dj�LT ph3dm\U.�� 详述应用案例 o KY0e��&5
�J���|8 �u 光线追迹模拟和结果 V|4���k=_- qIO)<5\[%d 定位双轴振镜扫描仪 kcP&''���
WVx�^}_FD0
 4EhWK;ra
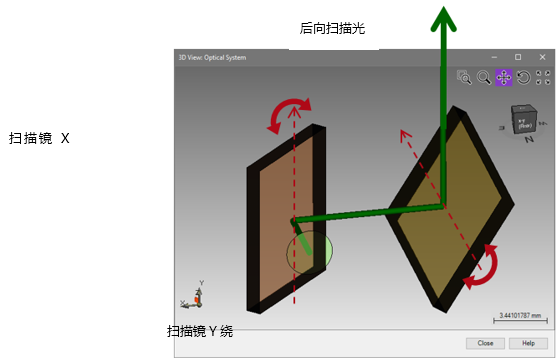
��SPINV��. 双轴反射镜由两个分离的镜子组成。 i�}C%`�1+( 第一镜将目标光束偏转到x方向,而光束沿第二个镜子的旋转轴偏转。 n,p \�~Tu, 第二反射镜将目标光束偏转到y方向。 Q����q��p= 在VirtualLab中关于反射镜的设置可以在LSC.0001中找到。 !!])~+4pP� file used: LSC.0002_LaserScanning_F-ThetaObjective_01_RayTracing.lpd LEAU3doK;�
G%%5lw!y' 评价扫描场尺寸 rWp+kV[Ec> O5JG!bGE_F 为了在探测器平面(视野场)评价扫描场的大小,可以执行一个扫描过程。 |�W SvAM3 使用参数运行的扫描模式,通过逐步的改变反射镜X和反射镜Y倾斜角度直至最大机械角度±12.5°,以模拟扫描过程。。 i�r�n
�}.e �y*l��AmO 4EhWK;ra
��SPINV��. 双轴反射镜由两个分离的镜子组成。 i�}C%`�1+( 第一镜将目标光束偏转到x方向,而光束沿第二个镜子的旋转轴偏转。 n,p \�~Tu, 第二反射镜将目标光束偏转到y方向。 Q����q��p= 在VirtualLab中关于反射镜的设置可以在LSC.0001中找到。 !!])~+4pP� file used: LSC.0002_LaserScanning_F-ThetaObjective_01_RayTracing.lpd LEAU3doK;�
G%%5lw!y' 评价扫描场尺寸 rWp+kV[Ec> O5JG!bGE_F 为了在探测器平面(视野场)评价扫描场的大小,可以执行一个扫描过程。 |�W SvAM3 使用参数运行的扫描模式,通过逐步的改变反射镜X和反射镜Y倾斜角度直至最大机械角度±12.5°,以模拟扫描过程。。 i�r�n
�}.e �y*l��AmO 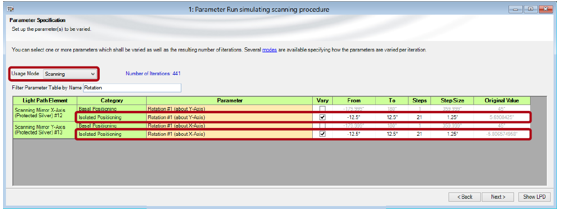 6�h&i�<�-> 6�h&i�<�->
8]J�l�Y�e�
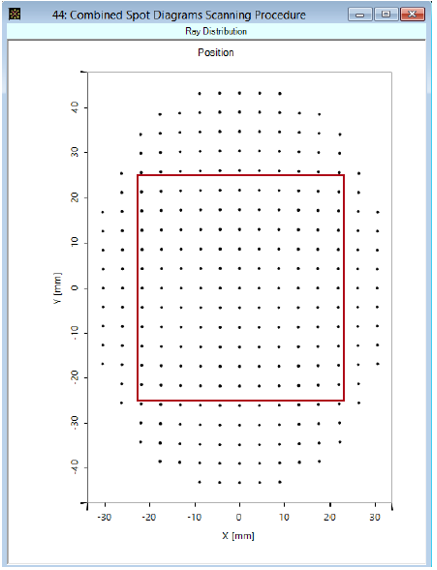 hN�F��,�sA n%{oF�TLCo 上图显示了偏转光束中主光线的位置,光束由于不同位置的反射镜而发生了偏转。由参数运行(Parameter Run)的联合输出特性(Combined Output Feature)生成。 Gx(%AB~9$� 参数运行的组合光斑图可以在探测器平面上评估扫描场尺寸(例如50mm x50mm)。 2K��2*UC`f 此外,扫描位置位于非等距网格,由镜子倾斜和实际入射扫描角Theta之间的非线性关系生成(想要更多细节,参见下一张幻灯片)。 B�\>�3[�_n file: LSC.0002_LaserScanning_F-ThetaObjective_02_ScanningProcedureAngles.run .b�<wNU�zP ��s)9�sb�J 反射镜倾斜和入射扫描角Theta之间的非线性关系 %z[�"��TVH hN�F��,�sA n%{oF�TLCo 上图显示了偏转光束中主光线的位置,光束由于不同位置的反射镜而发生了偏转。由参数运行(Parameter Run)的联合输出特性(Combined Output Feature)生成。 Gx(%AB~9$� 参数运行的组合光斑图可以在探测器平面上评估扫描场尺寸(例如50mm x50mm)。 2K��2*UC`f 此外,扫描位置位于非等距网格,由镜子倾斜和实际入射扫描角Theta之间的非线性关系生成(想要更多细节,参见下一张幻灯片)。 B�\>�3[�_n file: LSC.0002_LaserScanning_F-ThetaObjective_02_ScanningProcedureAngles.run .b�<wNU�zP ��s)9�sb�J 反射镜倾斜和入射扫描角Theta之间的非线性关系 %z[�"��TVH
�l�,
-q:8� 为了更好地说明反射镜X和Y倾斜角和入射扫描角Theta之间的非线性关系,执行相似的参数运行(此过程中没有使用扫描光学原价n)(参见下图)。 :�:Pf\�Lb> 这种非线性特性是由三维反射定律和两个扫描维度分离的反射镜引起的。 Bs<LJzS{�V 因此,探测器的位置位于一个非等距网格上。 f��/i[?
gw 为了生成一个等距网格,必须使用3D反射定律来解析地补偿非线性。 �FNXVd/{M3 p49���T3V� file used: LSC.0002_LaserScanning_F-ThetaObjective_03_NonLinearBehavior.run �i]0$�7s9!
ZRC7j?ui8` 补偿反射镜倾斜和目标平面上光斑位置之间的非线性关系 e�ie u�|�_
O9:J
^��g 上一个幻灯片,我们已经看到了反射镜倾斜和目标平面上光斑位置之间的一个非线性关系。在下面我们将使用VirtualLab的参数耦合(Parameter Coupling)工具来补偿非线性关系。 u6/;�=]0
� S@C�"tHD�
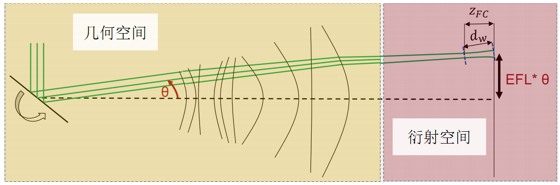
在F-Theta物镜焦平面上,光束的横向位置线性依赖于球形入射角Theta(θ)和有效焦距(EFL)。 _/F}�y[B7d
理想的球入射角Theta和Phi可以由探测器平面上的光束理想横向位置(x,y)计算得到。 R-\"^B�V#Z
?$4�Cg��N-
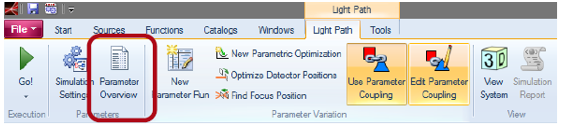
通过参数耦合进行系统调整 w�%kaM=���
^I�!gteU;
如前面的扫描过程所示,反射镜倾斜和探测器平面上点位置之间的非线性关系可以由参数耦合中补偿。 f�XAD~7T*s
因此,对于某点的位置,扫描镜的方向可使用三维反射定律来计算。 �*G,r:Bnb�
使用参数耦合工具,系统可根据三维反射定律来进行调整。 �Cta!��"=\
�PML84*K -
 2Zi&=��Zj" 2Zi&=��Zj"
T!Uf
PfEI
 Cd�iL{zH\3 Cd�iL{zH\3
4?~Ei[KgQn
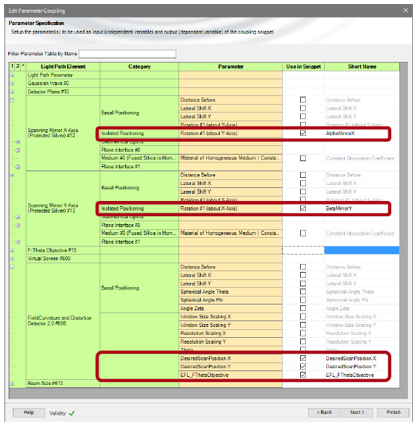
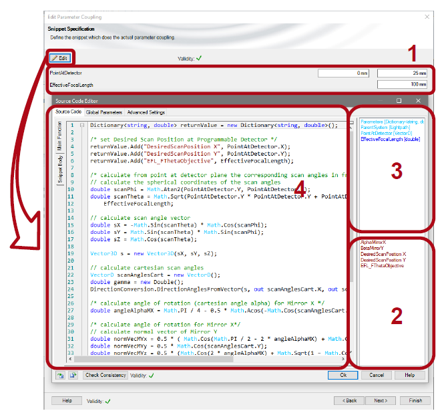
1.用户在成像面输入光束的理想横向位置 �SS��r�2K�
2.系统参数 ��$+�HS^�m
3.输入变量 OC2%9I�gx0
4.源代码编辑器(脚本定义,实现实际的补偿。) Z�H�c;8|�}
,�+RoJwi m
参数耦合脚本的输入变量也可以通过LPD的参数预览来进行访问。 +��Z%8X�!Q
 E�=~A�hkg� E�=~A�hkg�
轴上的3D光线追迹分析 �Bh!�J&SM:
Bs�N�~Z!kd
file used: LSC.0002_LaserScanning_F-ThetaObjective_01_RayTracing.lpd .�n)�0@�X!
A>}]=Ii�/
离轴P(25,25)mm上的3D光线追迹分析 {>�.qo��<k
p�9i�Crqi
�H3q��L&xL
再次进行扫描过程 iTeFy��-Ct
JT� 5�+d ,
使用参数运行的扫描模式,从-10mm到10mm,在探测器平面逐步地(每个维度5步)上改变理想光束x位置和y位置,以完成扫描过程。 �8R.��`*
从参数运行文档,可以绘制场曲和畸变的期望的图像,如LSC.0001所示。 �����0�mR�
v�X}mwK8�
file used: LSC.0002_LaserScanning_F-ThetaObjective_04_ScanningProcedurePos.run lV���2MRxI
|c!l�Zo/��
扫描过程中的组合点列图 ���&bS!>_9
e�R5�+��1b
&E8fd/s=�k
file used: LSC.0002_LaserScanning_F-ThetaObjective_04_ScanningProcedurePos.run +PkN�~�m`�
从参数运行(Parameter Run)中,可以生成所有单点图的组合点图。 =_H)�5I_�\
点位置位于等距网格的原因是使用参数耦合(Parameter Coupling)工具补偿反射镜倾斜到期望输入扫描角的非线性行为。 .@]M'S��^1
指定扫描过程的完整光线追迹数据可以在一个单独文档中获得。畸变评估 c)=UX�_S!
可以进行一维畸变评估(输入扫描角度Theta或者探测器横向位置)。 .;��~�K*GC
下图显示了使用F-Theta而不是一个非球面透镜以显著改善F-Theta畸变(LSC.0001)。 dLTA21�b�#
LSC.0001中可以找到计算畸变的一个详细解释。 .�A�Z+|�?d
XY��`2>�7�
file used: LSC.0002_LaserScanning_F-ThetaObjective_05_FieldCurvatureDistortion.run results stored in: LSC.0002_LaserScanning_F-ThetaObjective_05_FiedlCurvatureDistortion.da Q*AgFF%�wn
WnC�0T5S?U
场区评估 v4w�Xa:C�J
+�l_$�}�UN
以或者以输入扫描角度Theta或者以探测器横向位置来进行一维场曲评估。 9������TW�
下图显示了使用F-Theta物镜而不是一个非球面透镜场曲的显著改善(LSC.0001)。 %u�hhQ<zs%
可以在LSC.0001找到场曲计算的详细说明。 '�k[gxk|d2
�WWY�G>�C[
file used: LSC.0002_LaserScanning_F-ThetaObjective_05_FieldCurvatureDistortion.run � n�zO��RG
• A detailed explanation of the calculation of the field curvature can be found in LSC.0001. Z�'z~40Bda
results stored in: LSC.0002_LaserScanning_F-ThetaObjective_07_FiedlCurvatureDistortion.da _d/ZaCx'i�
"�n=Ih_J�
详述应用案例 �k~�b8=��$
场追迹的模拟和结果 o�M#S�.f?
g���ed�k
分析光束剖面 E|Z7ar�t��
几何场追迹引擎可以在一个特定的探测器位置上更为精确地评估光束剖面,位置和直径。 - dt<�w;>W
因此,使用聚焦区域探测器,通过几何场追迹在几何区域内传播场并且在衍射区域内求解光束传播的衍射积分。 � !�#8=�tO
将光束参数探测器(Beam Parameter Detector)应用到倾斜探测器的场以获得束腰距离dw。因此,场曲率值ZFC可以用物理光学方法进行计算。 >zAI�#N��4
yw)Zt�g�)
 A���?8�29< A���?8�29<
file used: LSC.0001_LaserScanning_Asphere_07_BeamProfileOffAxis.lpd 1�
�+'HKT}
8�?7�:�sfc
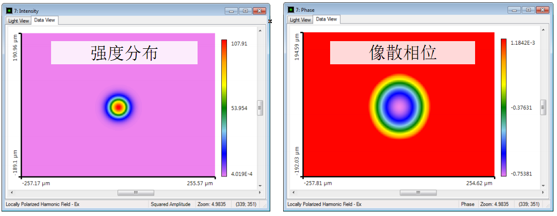
在轴上P(0,0)mm分析光束剖面 �XS/5y�(W
在轴上,对于强度分布来说,光束像差扮演一个次要角色。 CiGN?�1|
球形相位可以由场追迹计算,相对于光线追迹的结果显示了附加的离焦。这个离焦现象是由光束的衍射效应造成的。 _Uz��}z#jt
BV
�HO��_
file used: LSC.0002_LaserScanning_F-ThetaObjective_08_BeamProfileOnAxis.lpd k�|}S K�9�
�VG`A* Vj
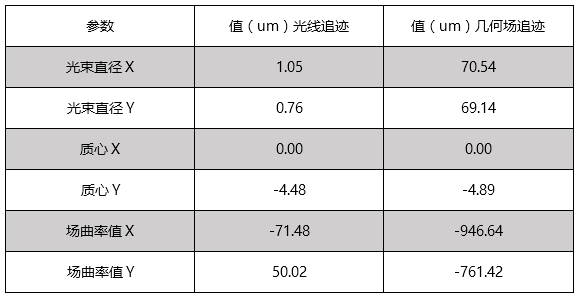
光束参数探测器确定光束直径和质心位置和束腰。 9#@C�miIhy
由更精确的场追迹获得的光束直径,明显高于工光线追迹获得的结果。 >h�
m<$3
附加的物理光学离焦由场追迹直接影响场曲值进行计算,如下表所示。 �?�V&[�U�
XL7jUi_4:L
8h2��!�8'�
外轴P(0,25)mm上分析光束剖面 �oFRb+H�(E
一般来说,离轴场轴上场由不同的中心方向与。 \;��A\ vQ[
因此可以通过倾斜探测器以避免线性相位叠加,正如LSC.0001中提到。 {XNu4d9w�(
像散球相位表明在x和y方向不同光束尺寸组形成的一个离焦光斑。 �{�L�8�(5�
 a�J��Du�_� a�J��Du�_�
由更准确的场追迹获得光直径束明显高于由光线追迹获得的结果。此外,由于像散,在x和y方向上所获得的光束直径有所不同。 ?i���BHJ{�
由场追迹计算的附加物理光学离焦直接影响了场曲的值,如下表所示。 �o*�u A+7n
光束位置(=光束质心)相比于光线追迹的结果也略有不同。 �w�FaWLC|&
f(E � 'i>�
 `&U [��'_% `&U [��'_%
�s"��?&�`S
其他的VirtualLab特征 k|7�XC@i]%
oB$D�&��
在此案例中,你将从以下选择的特征中获益: �Pz"!8b-MN
各种探测器 jj�m�-%W�@
– 测量的焦点位置取决于镜扫描角 |�JL�4�7FR
– 在探测器平面测量的光束位置 S-���h1p�`
– 使用聚焦区域探测器计算聚焦区域中的场 ca�_8S8l�v
参数耦合 #�|�8!0]n'
对于扫描光学的期望输入扫描角度Theta,调整反射镜方向参数运行 ;.�h5; `&
– 估计扫描场尺寸 3�;�`93TO{
– 生成场曲和畸变图样 �.n�`MPx�'
pz�^"~0o5
总结 �EQ>bwEG��
%�;PPu$8K9
VirtualLab可以: +*��
)Qi)�
使用双轴扫描镜和F-Theta物镜模拟激光扫描系统 +�-�#| M|a
在目标平面分析偏转光束 o�=�_�4v�^
– 由光线追迹计算扫描场尺寸,场曲和畸变 ? F �f�w'O
– 由几何场追迹精确计算光束剖面 ��]IJ�.�}
– 场追迹可以精确分析光束位置和焦点 �/7�h%s�CX
s/W��g^(&M
进一步阅读 zq]�V6�.]J
"O|f��X\}5
进一步阅读:参考文献 _ �#�l b\
v.v�3HB8�p
[1] Von Scanlab7 - Eigenes Werk, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=16724483 c�uq�uA ~
[2] Frank Wyrowski ; Huiying Zhong ; Site Zhang ; Christian Hellmann; Approximate solution of Maxwell’s equations by geometrical optics. Proc. SPIE 9630, Optical Systems Design 2015: Computational Optics, 963009 (October 15, 2015) �(s{%XB:�K
fp4��d�?3G
进一步阅读 jt2�m-�*aP
?#D�@e5�Wf
以下文件给出一个详细的描述,如何在VirtualLab中设置和优化激光系统: N�nS�I��=M
入门视频: 4Df�TVO�"h
– 介绍光路图 �l�L�tC9:�
– 介绍参数运行 zAB-kE�\�)
使用案例: q�BX<{���[
– 元件的定位和取向 ;Xgy�2'3��
– 光线追迹引擎的设置和结果演示 s�S(^7GARa
– 使用参数运行文档 Y�jk�� A^e
– 一维数值数据阵列多重图像模式 !1"~tA!+p=
– 大孔径透镜系统-通过几何场追迹+进行分析
~5}b$qL#`
+I\��bs.84
#8|;Q`Or:
QQ:2987619807 cX.�v^9kuX
|



