非球面后焦点的研究
�94���2�(a
应用示例简述
*}��yOL�
[ �Y[oNg>Rz 1.
系统详细内容
P[;<,U;'HO
光源 I-@A{�vvPK — 具有发散角的红外
激光二极管
B�vXA9Y�Q3 组件
Equj[yw%�@ — 折射准直系统并用非球面
透镜进行聚焦
� �y"�>_$� 探测器
!/1a�o�t^( — 点列图
tb�x* }uy2 — 波前差
�%/b3G�*$W — 聚焦区域的1维和2维光场研究
�_?9|0>]xG —
光束参数 a4�zq`n|3U 建模/设计
?*2DR:o>�@ —
光线追迹:最初焦点位置检测
v�D��G�AC' — 场追迹:包含衍射效应的高精度焦点研究
�Gp0B^^H�$ 8M��{-�RlR 2. 系统说明
\K�BE�+yj� ^jY'�Hj.Bs
ck=�x_�HB1 3. 建模及设计结果
4#��pn���] ��z#$>f*�b
�i)v��bmV� 4. 其他VirtualLab 功能
B%~hVpm,eM z>�\vYR�$ 在该示例中,你可以受益于如下的功能:
!,;>)�R�� 一个非球面透镜的聚焦能力的分析
X(sN�+7DOV 确定焦点位置,通过:
4
_�*^�~w — 焦点寻找工具
'p%\f��b6` — 参数运行文件
9�-Y.8:�A` — 光束参数探测器
;��IN!H@bq 得到不同的信息/演示结果,如
~�OuK�ewr\ — 透镜
像差 h($XR�+�!# — 光束质量:光斑尺寸/形状,M2值
.7�h:/d
Y: — 不同的2D&3D图来说明聚焦改善
(qf%,F,�_L C-vFl[@a�0 #FAy
]7/O 5. 总结
Dy�_ayxm�� �{P��/5cw VirtualLab能够:
Hr?_���`:� 利用场追迹,高精度的确定焦点位置
��0j��=xWC 位置可通过一下两步来确定:
Gr1WBY�K� — 通过光线追迹快速寻找焦点
XXx�]~m��� — 利用场追迹对焦点进行高精度研究
�=�/ b2�e\ X?2ub/Nr#Y |Og�tA�I9� 应用示例详细内容
KdBE[A-1^M cO&�(&*J r 系统参数
q+�KG�Q*�� @-L4<=��$J 1. 应用实例的内容
z��5V~m_RO Yq�pe2II7� BDS.0001,BDS.0002以及BDS.0003主要关于一个折射型光束传输系统。
N ,8^AUJ3& 在该示例中是阐述了对一个非球面目录中透镜聚焦区域的研究
1E1oy(��\V 在BDS.0003 一个双胶合透镜用于光束聚焦。
ws^ 7J�/8 6RA4@bI�G 2.
仿真任务
*OX�;�ZQg0 2 �N��r�* a#U2���y�" 3. 规格:非准直入射激光束
+>�w �%j&B _4Ciai2Ql W8@o7svr�h 4. 规格:准直透镜和后续光线
%%7~��<=rk ^lI�>�&I&1 V����L[�}� ZxDh94w�/� 5. 规格:非球面透镜
X(YR).a�~� �1N3q��Mm^ w=|�"{-ijo �j�'��2:z# pG�wBhZnb> 6. 初始透镜(目录&网站)
vX��q2="+ +NM`�y=�@@ %^z�GM^P�D “LightTrans Defined”的VirtualLab元件目录中包含Asphericon 公司的透镜。
`vMrlK�q 此外,Asphericon 公司也在其网站提供了VirtualLab文件。
4s� <|8�� �� D|8Pe{` 应用示例详细内容
NF��A�jh?# ZQ�� MK1�� 仿真&结果
y)Y0SY1�\j l�-�~
o&n� 1. 光线追迹和传统场追迹设置
9'�{i� |xG Ub"6OT1tl� x/)o'#d$|l 为了对聚焦区域详细研究,采用光线追迹和传统场追迹。
�_e�9S"``� !_a��@autj 我们将检查焦点附近处z方向不同位置处的光。
dPVl\<�L�1 J�SCZX:�5 系统未改变的部分无需多次重复仿真,因此可直接计算非球面后的点列图和光场分布以便执行参数运行评估。
4:50d���j ��h�FiJ�HV }��O7�!>�T 2. 通过光线追迹寻找焦点位置
���'1f��:8 Bh�%Yu*�.f I<&(D�g|XQ r;~2NxM�F/ 3. 光线追迹:
优化工作距离
&3_�S+.�JO u�sF�hc�U� fxc�C�z 5� 4. BFL=22.60mm的3D光线追迹分析
?h1r6?Sug{ !#b8�Q��ER }�z�E
Qrfl 5. 光线追迹:径向均方根直径评价
�an<lo�L�W yE3��l%<;q v"~0 3-SX� 在后工作距为22.56mm处的光线追迹得到最小径向均方根直径。
#[<XN�s�!" xDtJ&�6uFw 在此距离下计算的径向均方根直径为5.55um
b-Uy&+:X*d V�`,tu �`6 下一步,将利用经典场追迹设置进行评估。
Y�!0Zw��wW �c_R�AtM<n 6. 场追迹:详细分析
0X�e?�{!@a �t:N3k ;k� 场追迹仿真可对光场参数进行评估。
e5�HH�sR6� 例如
�K7jz*�|�2 我们查看光强和位相值。
~d)2>A��2: 我们应用光束参数探测器用以更详细的研究光束。
{�] Zet}2� )�r +o51gp 对聚焦点研究最重要的是,场追迹可以分析衍射效应。
'(S@9%,aK1 0;6�^fiSY; 通过分析假定焦平面附近不同z位置的光场,我们可以观察聚焦光线的改善,并将光线追迹仿真结果与场追迹仿真结果进行对比。
�T�M?RH{(r B}|(��/a@* 7. 光束半径vs. 距透镜距离
��� 0+P[�0 ?_<14�%r;
)RZ�:\�:�c 8. 场追迹:波前差
:��}[�RDF? 'U���%L\v, �#��1#?�k� VirtualLab可以直接研究非球面透镜后的位相,并忽略预期的球形位相值。
8�h�=Rf�a9 因此,仅保留剩余位相调制。
�O�bl,Qa:5 其并不代表透镜的像差。其是准直入射光所带来的残留最小像差。
LNU#NJ^Axt
Z'�ZN�^j{ 9. 距离22.60mm处聚焦点光强
\'}? j-�8� {r�.yoI4�e /CT g3Q"KQ 10. 聚焦区域内1维场评估
�~�� 6`Ha@ A"PmoV?lAm ]|#%`p5��6 11. 其他VirtualLab 功能
C�dFr
YL+F 在该示例中,你可以受益于如下功能:
hZ;[}5T\<S 一个非球面透镜的聚焦能力的分析
p0�b2n a
! 确定焦点位置,通过:
2uajK�..b� — 焦点寻找工具
_R�] qoUw; — 参数运行文件
s+j��L� BY — 光束参数探测器
bFt�$u]Yvo 得到不同的信息/演示结果,如
�54geU�?p0 — 透镜像差
MR�n;D|Q� — 光束质量:点尺寸/形状,M2值
pZA0Go2!IN — 不同的2D&3D图说明聚焦改善。
qL
�0��{w7 zw�EZ?m!� 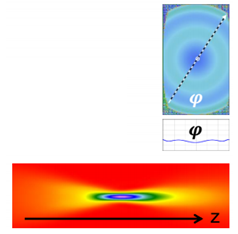 B[8`l} t�� %I
3�D/!%�
B[8`l} t�� %I
3�D/!%� 12. 总结
�b��f�2�B� VirtualLab能够:
Ce�%fz�~*b 利用场追迹,高精度的确定焦点位置
��'G�J'Vli 位置确定可通过两步:
f�Z6"DJ�Z — 通过光线追迹快速焦点寻找。
g�/�v"�E+� — 利用场追迹高精度焦点研究。
G$�HXc$�OY �q8�_8rp-@ 6_#:LFke�� 扩展阅读
#;WKuRv��� 1. 扩展阅读
[fjP.�kw;J 以下文件给出了如何在VirtualLab中设置和分析激光系统的更多细节
t��X�Wh�q� 启动视频
2xEG ��s Q — 光路图介绍
�'9�R.$,N — 参数运行介绍



