-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-07-24
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
摘要 �5=KF�!?��
"*7C`�y5&P #'��hL��b 在增强现实和混合现实应用(AR/MR)领域的波导器件的设计过程中,准确计算可实现的光学性能是其主要任务之一。除了空间和角度均匀性外,一个非常重要的量是调制传递函数(MTF),它可以评估最终器件的分辨率能力。在本例中,我们指出了衍射和相干效应对计算得到的MTF精度的影响。我们会进一步说明,一个准确和快速的包含这些影响的计算需要在一个单一平台上结合高度交互性的模拟技术。这也使用户能够无缝地控制复杂光学系统的精度和速度间的平衡。 �y�>\S��@I
gNx+>h`AF� 任务说明书 �+/?�iCmW 任务:如何准确计算波导的MTF?需要考虑哪些影响? $cVi�;2$p Bf�d-:`Jk� 布局和初始参数: &D#+6M&LK{ 耦入耦合器 �XV'fW�~j\ ·理想光栅 ��Q�&M'=+T ·380 nm周期 &!35/�:~uD ·效率+1级次:50% #\bP7a��+� ·效率0级次:50%(用于背面照明) M��jaUdf�x 耦出耦合器 �yo�q�a@�V ·二元光栅 �2@vj!U��8 ·380 nm周期 FyG�6�!t�% ·高度:50 nm !a��x;5�@J ·填充系数:50% S2~@nhO`U( 光瞳扩展器 �Qrz�4��}0 ·二元光栅 J -Qh/�d%] ·268.7nm周期 AH�.9A_dG� ·高度50 nm !k~z5z'=py ·填充系数50% v@G4G*x�\� z�L� s^,x �'nK~'P�Z, 仿真与设置:单平台交互性
wAb�p3h�X 连接建模技术:光源 Vos?PqUi 4 光源引擎模型 @XO�i�62�( ·光束类型:平面波束 X9~m8c){z ·直径:3mm(圆形) �S=gW(c2�' ·偏振:线偏振 ~"��O�NA�X ·波长:532 nm 4FA|[��A�n ·带宽:0 nm、1 nm、10 nm .#^0p�v�!� >uHS[ _`nM  {��U
<tc4^ {��U
<tc4^
在此设置中,有两种不同的技术对光源建模,每种技术的优缺点将在文档中讨论。 Fs�C�wF&/q
建模技术的单平台交互性 �=sQ(iso%f
每束光束在复杂系统中传播时都与不同类型的光学元件相互作用。因此,一个精确的模型需要算法的无缝交互性,以便能够处理以下出现的所有方面: 2/tb�6'� =
1. 光栅(耦入耦合器、光瞳扩展器、耦出耦合器) I{dl%�z73�
2. 自由空间(平板玻璃内传播) �BV9��*��s
3. 平板玻璃表面的反射 7dD�.G/'�
4. 区域边界(光栅边界) ~HP�
�L�V
5. 探测器表面的反射(视野范围均匀性测量) �lSc,�AOXp
6. 眼睛模型(PSF和MTF计算) i+~QDo�(Pi 连接建模技术:光栅 �PI7IBI�� 1. 光栅(耦入耦合器、光瞳扩展器、耦出耦合器) �oA3d^�%(c 2. 自由空间(平板玻璃内传播) It���K���� 3. 平板玻璃表面的反射 j�%���M @# 4. 区域边界(光栅边界) KC�X�w�n�� 5. 探测器表面的反射(视野范围均匀性测量) �"2h5m�4�� 6. 眼睛模型(PSF和MTF计算) *d
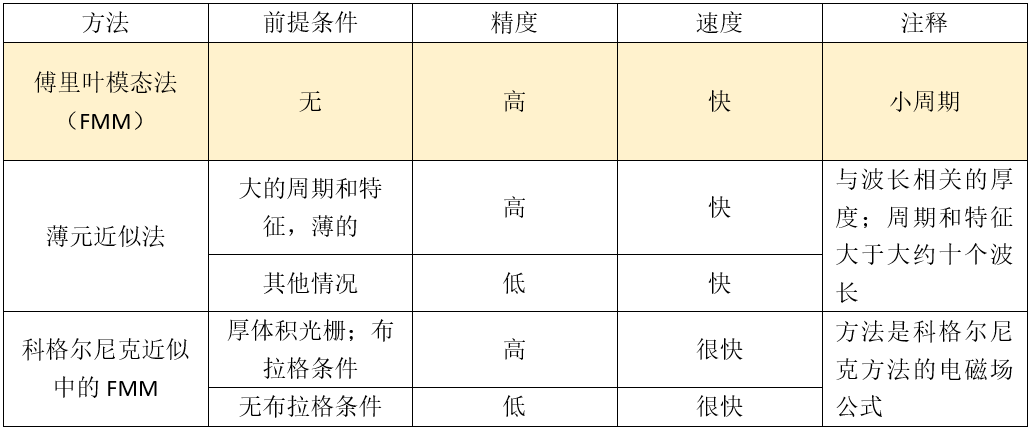
l�"w�H& 5fH���Yc0� 周期性微纳米结构的现有建模技术: *1;23BiH�-
0|�2%#�� E
 *5�w�v%-�� *5�w�v%-��
�[:i s�ZG*
\o9@�[t>&2
作为一种严格的特征模求解器,傅里叶模态方法(也称为严格耦合波分析,RCWA)提供了非常高的精度。由于此设置的时间较小,计算速度较快。因此,FMM是提高准确性和速度的最佳折衷方案。 �|��|�a`fH
md6��*c./Z
连接建模技术:波导板内部 y<�r44a_!�
1. 光栅(耦入耦合器、光瞳扩展器、耦出耦合器) 1hNEkp�L^a
2. 自由空间(平板玻璃内传播) dy_.(r5[L]
3. 平板玻璃表面的反射 �yQ�S04Bl]
4. 区域边界(光栅边界) ~'f8L�#[�M
5. 探测器表面的反射(视野范围均匀性测量) '?R����=�P
6. 眼睛模型(PSF和MTF计算) �#���J.�u� #D:Rhqj�K� 可用的自由空间传播的建模技术: �K%<GU1]-] 4��? {*( s<{G�pWT8�
有两种快速建模技术可用来计算平板玻璃内的传播: <t6�d)mJ�%
·傅里叶域技术(包括边界和孔径的衍射效应) �n49s3|#)G
·几何传播(忽略了由边界和孔径产生的衍射) t/Lg�H�b:)
为了选择合适的技术,需要考虑计算结果! �w?;��b7�i
连接建模技术:波导表面 G�e9�}8���
1. 光栅(耦入耦合器、光瞳扩展器、耦出耦合器) t|".��=3%G
2. 自由空间(平板玻璃内传播) �14u^[M"�U
3. 平板玻璃表面的反射 j}�RM.�C\7
4. 区域边界(光栅边界) Fs9�W>*��(
5. 探测器表面的反射(视野范围均匀性测量) �%�jgg59��
6. 眼睛模型(PSF和MTF计算) N(�'3�oy#8
与表面相互作用的可用建模技术: R�D9���Y�k
6��7
O<*M
|



