摘要 [ OMcSd|nf �[F+�l�Vb� 目前,大多数创新的增强和混合现实设备都是基于光波导或波导配置,并结合微观结构来耦合光的进入和输出。VirtualLab Fusion技术能够通过应用我们独特的物理
光学方法对这些器件进行详细的建模,其中包括所有感兴趣的影响因素(如相干性、偏振和衍射)。我们通过建立一个简单的“HoloLens 1”型(1D-1D出瞳放大器)布局模型来演示这种能力,该设备能够在32°×18°的
视场下引导光传输。
�)R�{4"&&2 )y.J2_�lI8 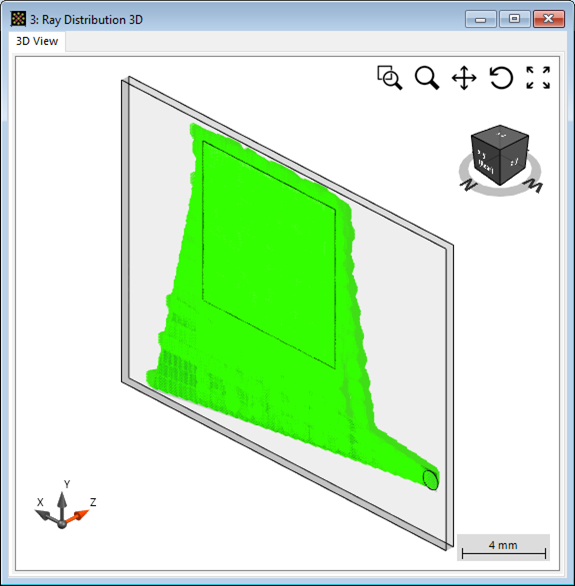 r�tf>\j+ �@<�},-�u 建模任务 �n�gEjbCV+ �0?SdAF[:z
r�tf>\j+ �@<�},-�u 建模任务 �n�gEjbCV+ �0?SdAF[:z 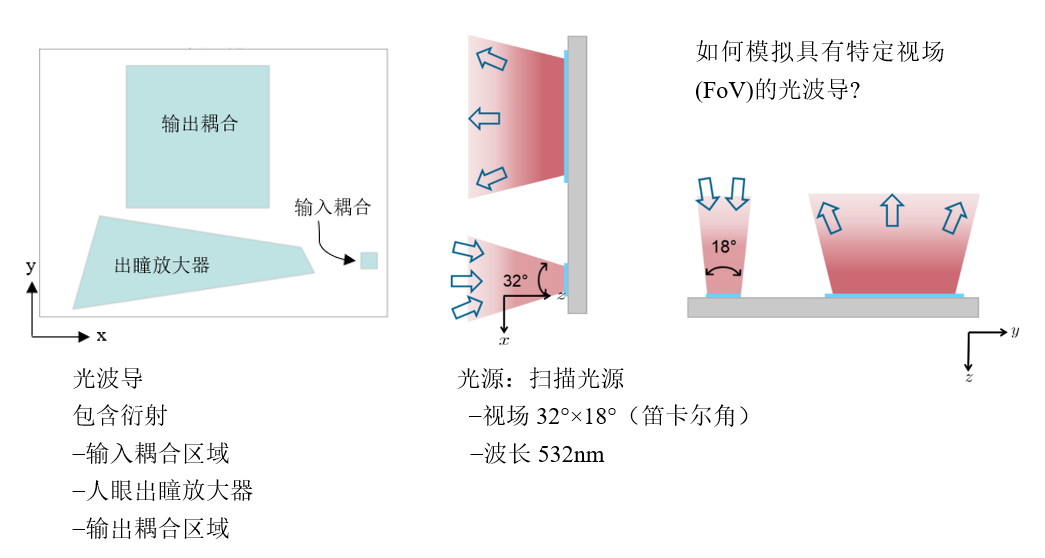 �!=cW�+=�1 ^b;.zhp8;N 光波导的工作原理 62%.�d�dM4 &�hd��+x5�
�!=cW�+=�1 ^b;.zhp8;N 光波导的工作原理 62%.�d�dM4 &�hd��+x5� 光波导使用内部全反射(TIR)来“捕获”光波导板内的光。为此,采用
光栅耦合入射和出射光,并确保满足内部全反射条件。
d�'^jek��h ��3j<]
W 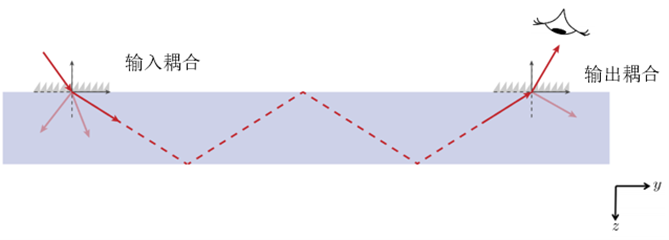 7Y��@���&& <�8r%_ '�]
7Y��@���&& <�8r%_ '�] 出瞳放大光栅的功能是在某一个方向上(这里是x方向)复制耦合的光瞳,以扩散出瞳,或者换句话说生成人眼观察区域。
tB}&-U|t[~ 在这种类型的设置中,输出耦合光栅不仅负责将光输出耦合到观察者,而且还负责光瞳在第二个方向(这里是y方向)的扩散。
v�8
ggP�I 这种分离式的光瞳扩散是“HoloLens 1”型布局的特征。
b �V;R}3�) XkuN�Ls�4� 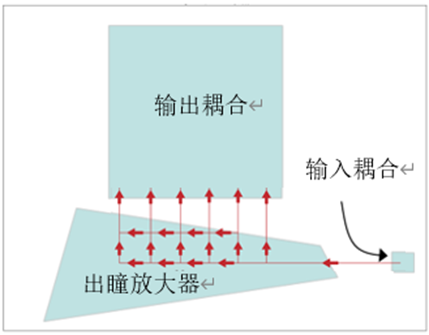 ��hRx�R2�
3�boI�NmX� 布局设计工具 OyZgg(i�N�
��hRx�R2�
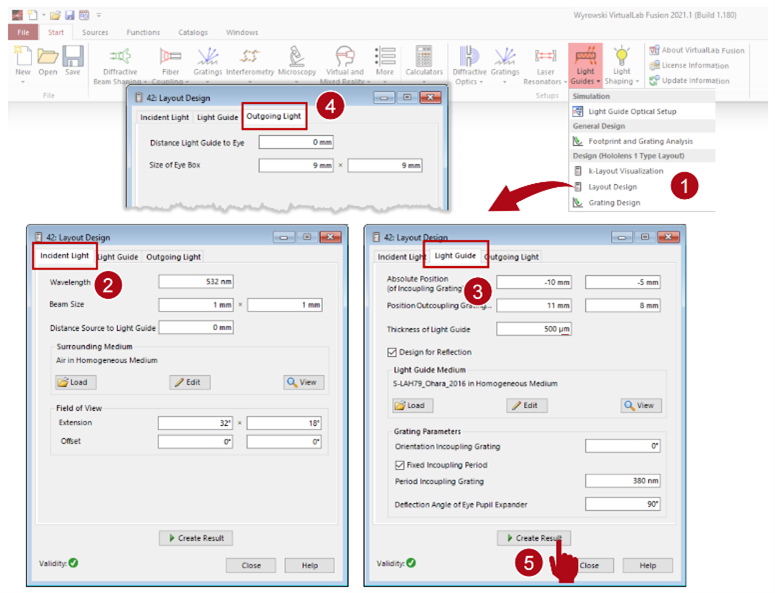
3�boI�NmX� 布局设计工具 OyZgg(i�N� 为了设置这种光波导的横向布局,可以使用VirtualLab的Layout Design工具(仅在光波导工具箱中可用)。
 '(&�.[Pk:" h3>/�..l�� 查看k布局 l5D8D�vJCj
'(&�.[Pk:" h3>/�..l�� 查看k布局 l5D8D�vJCj k布局图可以与光波导
系统一起作为布局设计工具的副产品创建,也可以通过菜单中的条目独立生成。
t%q@�W�,2J 可以配置以下参数:
� U`ID�Z{g 波长;
�*8,]f�BUq 环境和平板的
材料;
� ];B���h1 视场角范围;
��o}7`�SYn 光栅周期和方向。
�~e� ]83�? 结果图包含以下信息(在k域中):
y!mjZR,��& 描述材料内部传播条件的圆(可用方向和k值)。
�M�PT*[&\- 在某些光栅区域后入射光和衍射光的视场延伸、形状和位置。
R�BwI*~%g{ 由光栅引入的视场位移的说明。
b!5W�!vc�K �z[}�[:�H8 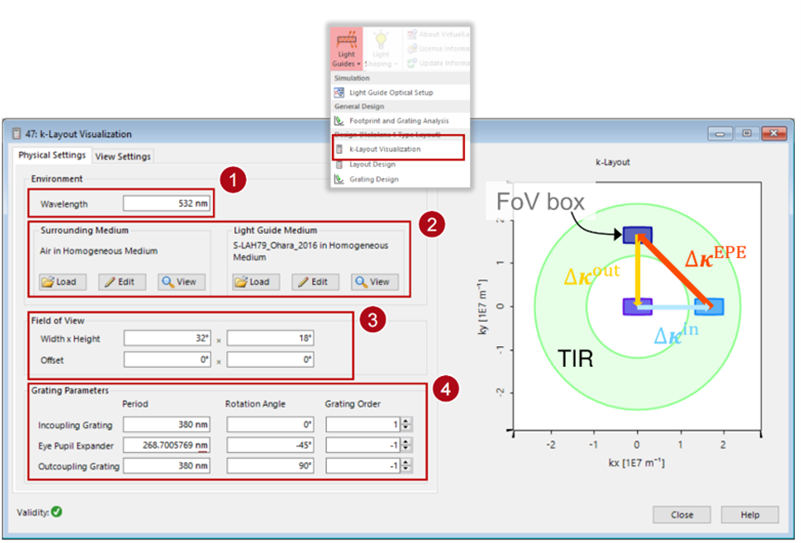 aJOhji<b#L
aJOhji<b#L 任何参数的调整都会相应地改变图像。
�6*GY%~JbD -+#\W�B{AI 光波导表面布局 F^3Q�0KsT� 几何布局显示了第一平面表面上的3个光栅:
<i%.bfQ/�- .1[�K\t)�2 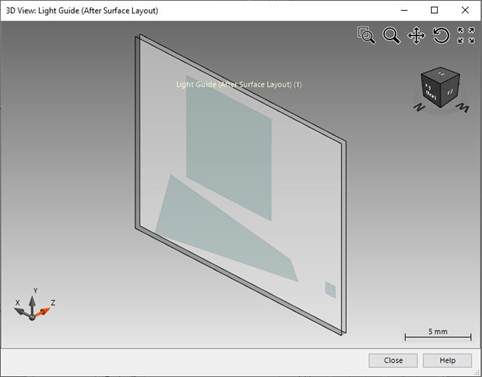 �M�7f�w/�i �M�{�3He)&
�M�7f�w/�i �M�{�3He)& 光栅#1:耦入光栅
�#
x!�47Y{ 光栅#2:扩散光栅
GO+cCNMa�" 光栅#3:耦出光栅
E�
Rqr0>�x �Ly�lB3�BM 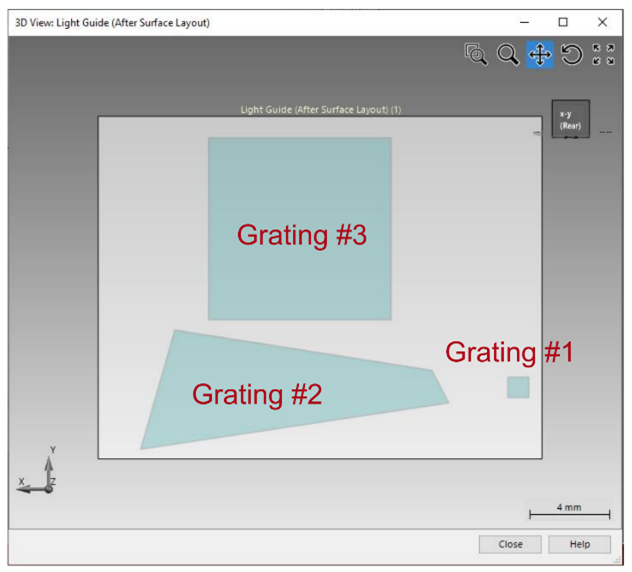 #fRh�G^QKp �� l}5@6;} 光栅#1:输入光栅 [-� a2�<E� 9`$fU)K[Pl ]j~V0�1p/e
#fRh�G^QKp �� l}5@6;} 光栅#1:输入光栅 [-� a2�<E� 9`$fU)K[Pl ]j~V0�1p/e 耦入光栅被定义在一个矩形区域内。定义光栅区域的一般工作流程是:
�8���uc�hp �g"FG7E�&� 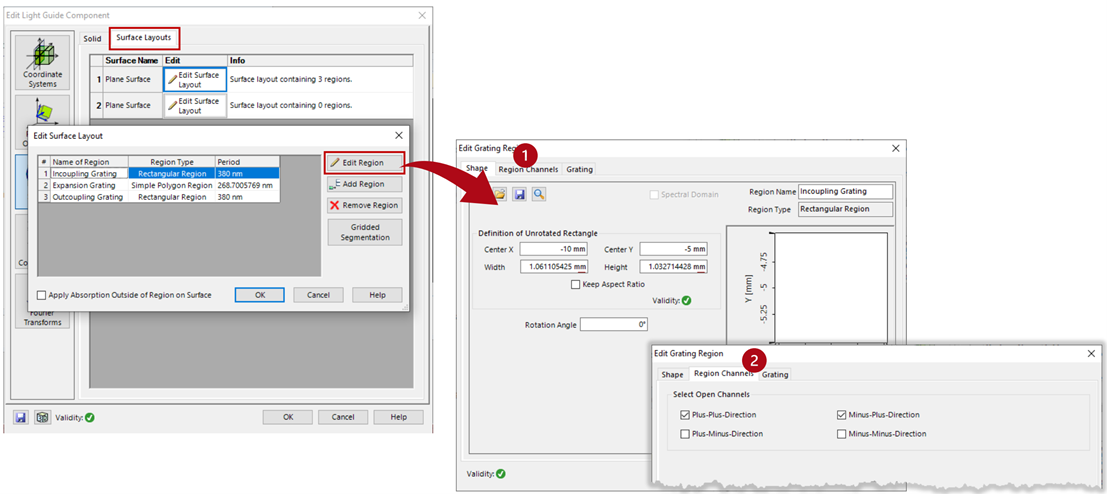 O�!\P]W4r$
O�!\P]W4r$ 1. 确定区域的形状和直径;
0.~QA+BD:S 2. 选择区域通道;
S �c_*L<�$ 3. 定义光栅的周期和方向;
(��XX6M[M8 4.指定传播级次(从正面和背面);
�Ky�8�sLm@ 5.指定透射效率和反射效率。
q�+>�{@tP9 cuB~A8H#�} 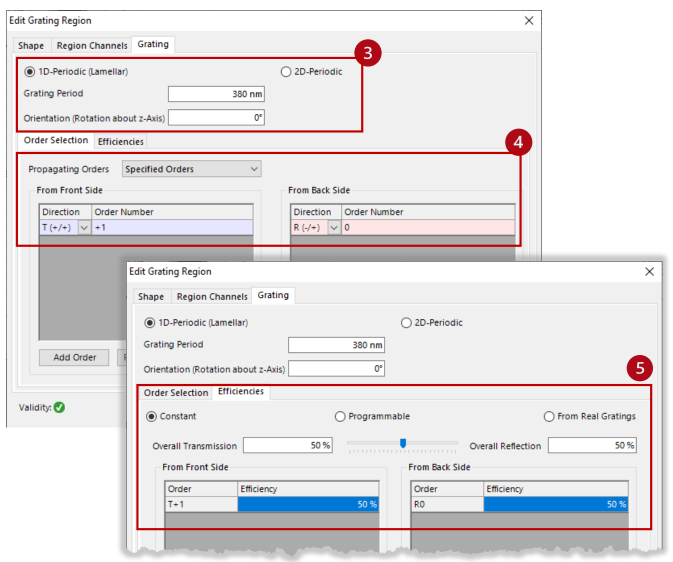 |E���u_K`� z\sy~DM;> 光栅#2:简单多边形区域中的扩散光栅 �O1�ofN#u� J;Xh{3[vO
|E���u_K`� z\sy~DM;> 光栅#2:简单多边形区域中的扩散光栅 �O1�ofN#u� J;Xh{3[vO 扩散光栅被定义在一个多边形形状的区域中。所需区域通道为‒//+,因此只指定照射到光栅背面的光的反射级次。
p'0j�db :S l|/��h4BJ' 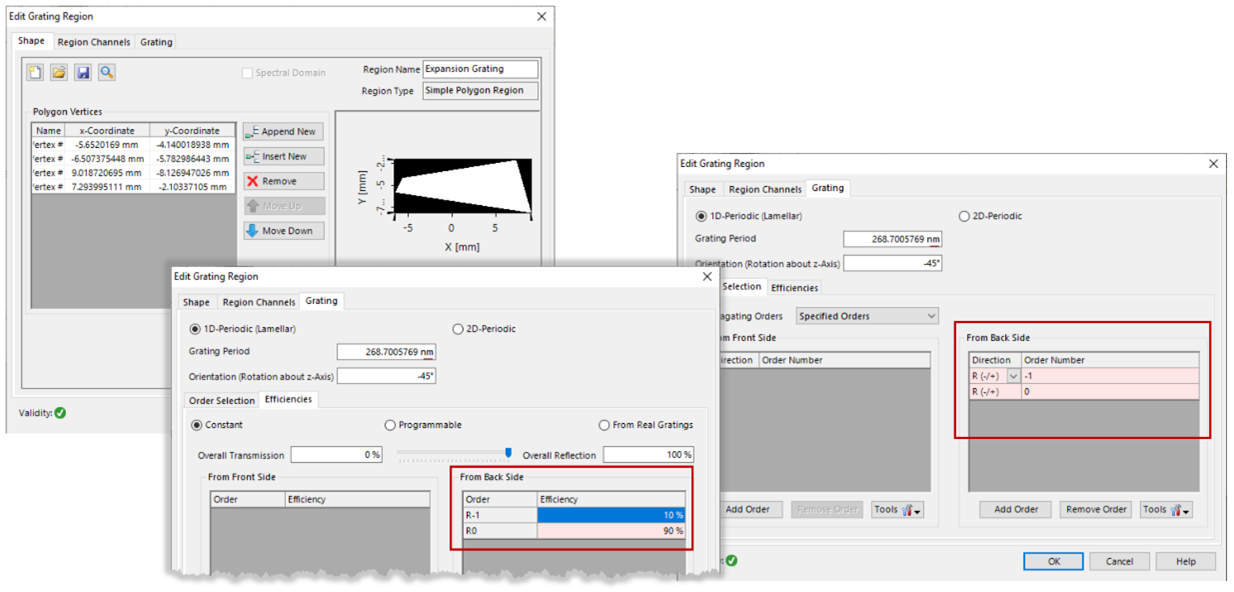 ^��}8�(o�� A{bt
�Z�#k 光栅#3:输出光栅 Nh^T,n�v*l sbjAZzrX2i D}>pl8ke~g
^��}8�(o�� A{bt
�Z�#k 光栅#3:输出光栅 Nh^T,n�v*l sbjAZzrX2i D}>pl8ke~g 输出耦合光栅被定义在一个矩形区域内。
�1j`-l�D�� 区域通道‒/+和‒/‒需要激活负责扩散和输出耦合的级次。
S�sIy��;l� +%OINM�o.A 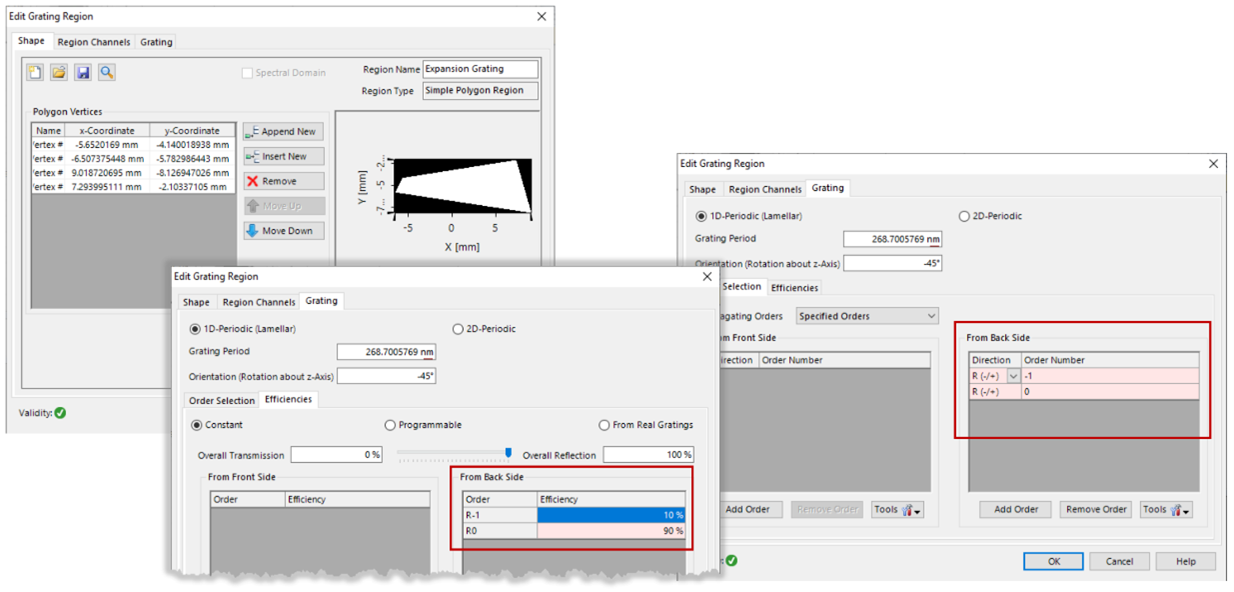 lF�2im5nZ? t>)iC�)^u� 结果:三维系统中的光线追迹 /!=�u�M��. u}\F9~W�-{
lF�2im5nZ? t>)iC�)^u� 结果:三维系统中的光线追迹 /!=�u�M��. u}\F9~W�-{ 有视场中心角度的系统视图光线:
h�q6�B
�pE �AE={P*�g 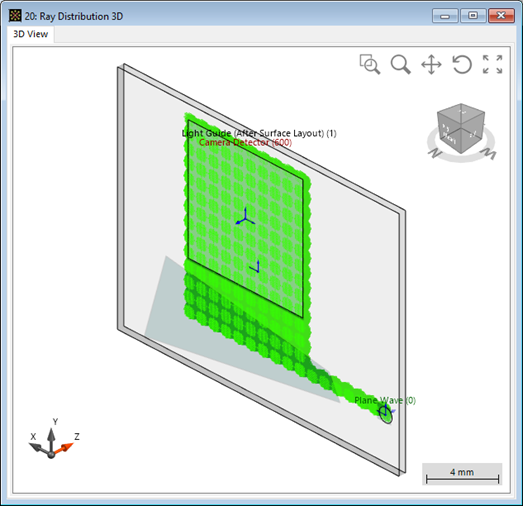 ��w�4Qqo(� pEu��ZsQ�
��w�4Qqo(� pEu��ZsQ� 32°×18°扫描
光源(9种模式,不同颜色)输入的系统视图光线:
%[u���6��< L'B�DS�*�� 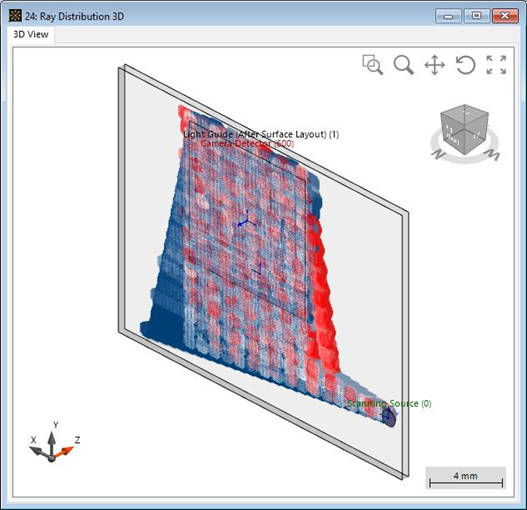 ��yM}}mypS GbFLu`I�u 结果:场追迹(真实颜色视图) W2D�^%;m�w +iz5%Qe<f
��yM}}mypS GbFLu`I�u 结果:场追迹(真实颜色视图) W2D�^%;m�w +iz5%Qe<f 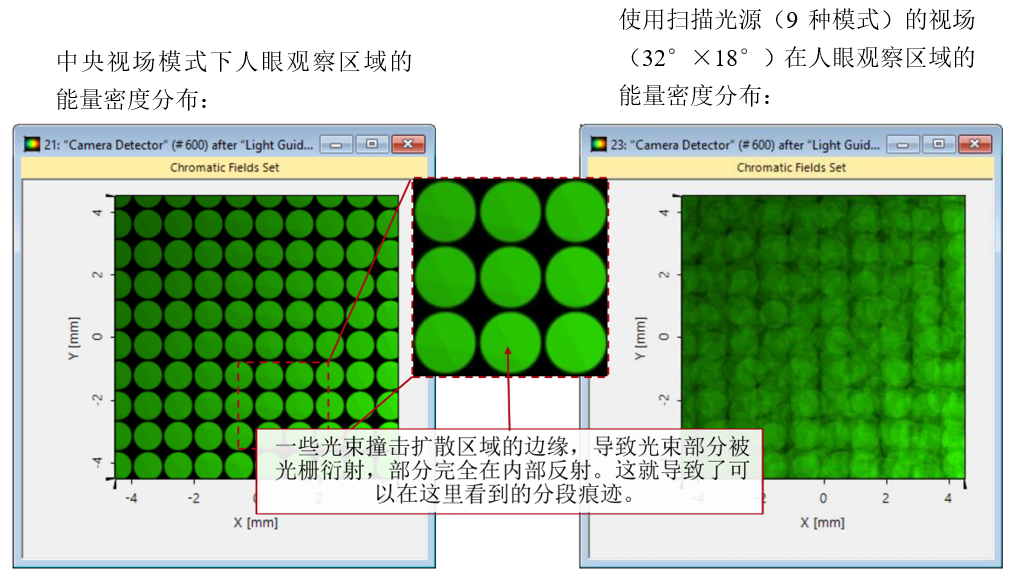 gPSUxE�`O. �?l!�L
)!2 结果:场跟踪(伪颜色视图) y>Zvos�e�� I= G�%r/�3
gPSUxE�`O. �?l!�L
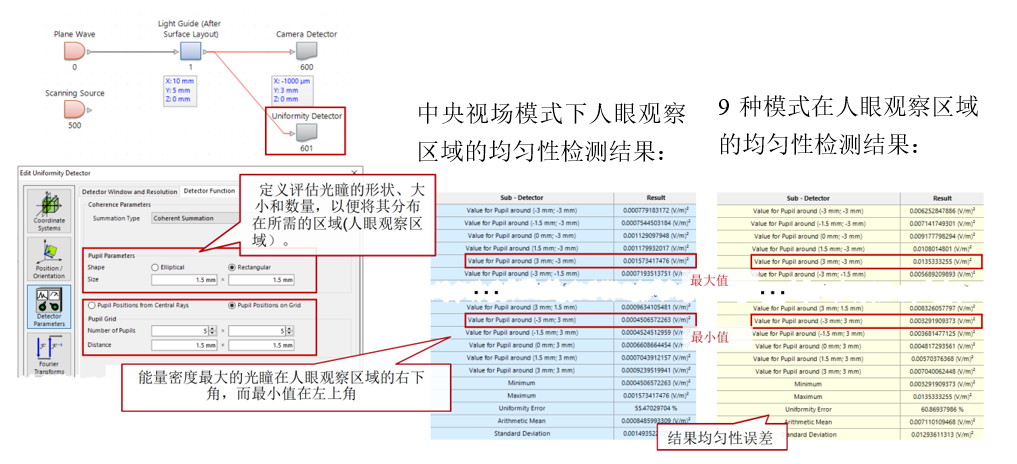
)!2 结果:场跟踪(伪颜色视图) y>Zvos�e�� I= G�%r/�3 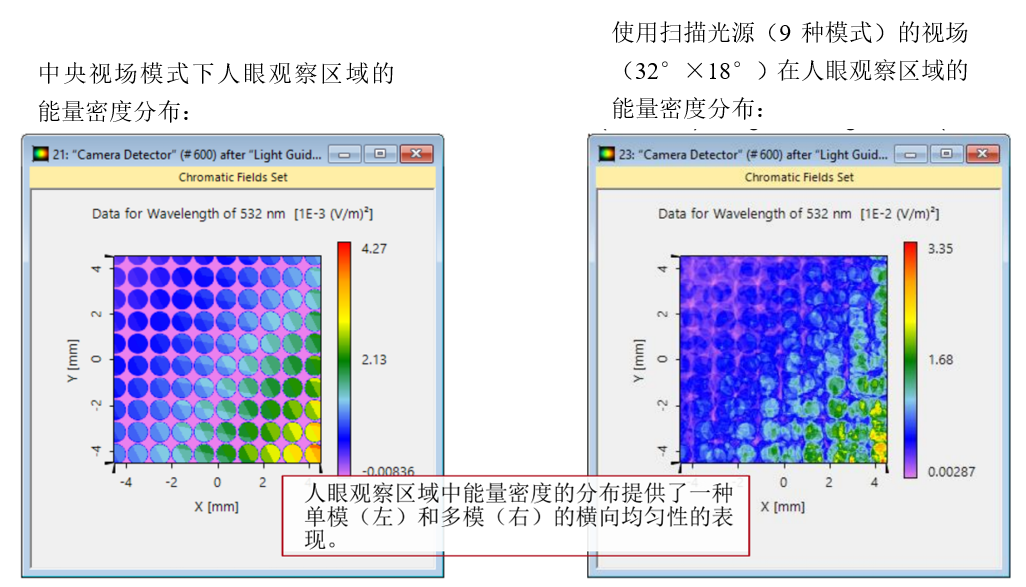 Dd-�;;�Y1C :9Z���u�&t 横向均匀性评价 h$F;=YS��� �|Z�r5I";�
Dd-�;;�Y1C :9Z���u�&t 横向均匀性评价 h$F;=YS��� �|Z�r5I";� 为了评估人眼观察区域内的横向均匀性,提供了均匀性检测器,它可以在元件列表中找到(在探测器(Detectors)>评价函数(Merit Functions)>均匀性检测器下(Uniformity Detector)。该探测器能够研究在特定位置的特定区域(如人眼观察区域)的横向能量密度分布。
p(QB�5at�� o�rV�sMT[A