摘要
G�N_L"|#)= .)/�.��"V� 点阵投影仪是启用Apple Face ID的关键组件。 该
系统通常由发光单元阵列,
透镜和分束
光栅组成。 透镜系统与光栅一起投射,并复制阵列
光源图案。 在此示例中,我们构建了这种点阵投影仪系统并演示了其工作原理。为进行系统分析,我们使用VirtualLab Fusion进行
光线追迹和场追迹。
v< P0f"GH )c��11�_1; 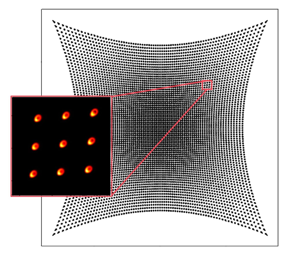 $O�Z= �L
$O�Z= �L
建模任务
U�`6�|�K$@ ]gBn�zh��. 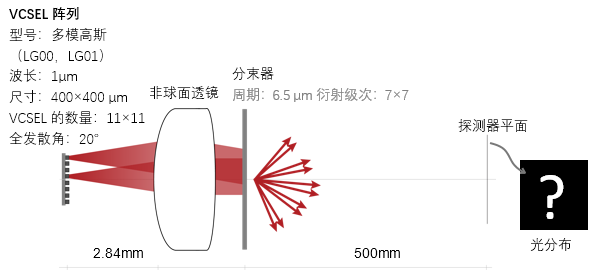 f\R_a�/U�s !.UE}��^TV
f\R_a�/U�s !.UE}��^TV *文档中的非球面镜片是使用ZemaxOpticStudio®设计的
S�T{V�i';} utmJ>GWSI 光源建模
j�Rg/N_2'2 �xb\EJ1M>� 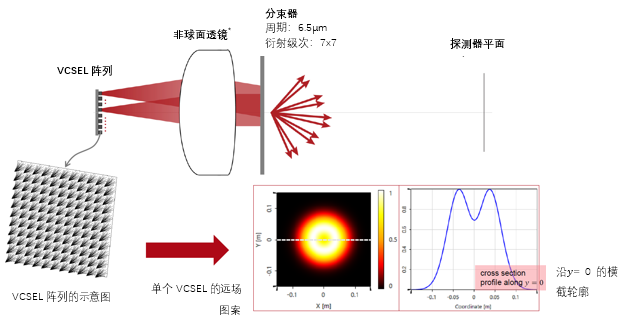 X��Z�%[;[ >�az~0PeEL
X��Z�%[;[ >�az~0PeEL 轴上VCSEL单元的仿真
h\!8*e;RAW v?�."�`,�e 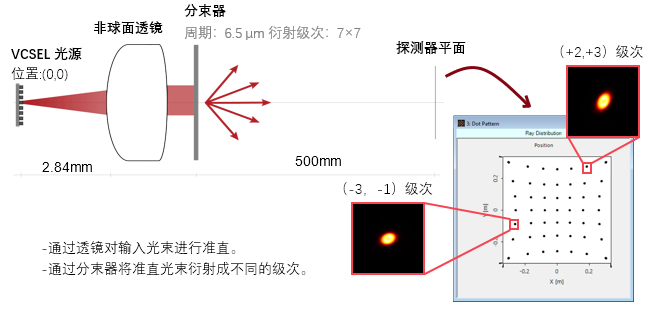 �O|t�>.<T? r|l?2 eO�~
�O|t�>.<T? r|l?2 eO�~ 离轴VCSEL单元的仿真
�(7qlp*8.s !H\;X`W|~D 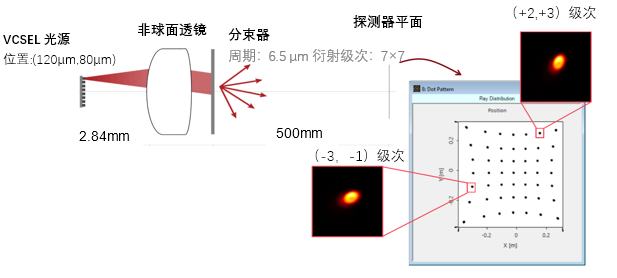 /p�h�MrL=� i(%�2t(wf+
/p�h�MrL=� i(%�2t(wf+ -对于离轴VCSEL单元,
镜头对输入光进行准直,准直角度与光源模式的位置相关。
,P9F*;D��j -因准直角度的关系,光斑图案相对于轴上情况有所偏移。
�4�bk`i*-O #ZJ �1\Ov 完整VCSEL阵列的仿真
ZiZ��@3O6� o}Grb�/LJ
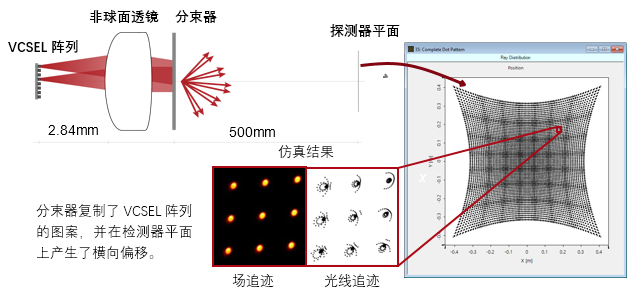 ���6:(�s8e 1Le�8W)J��
���6:(�s8e 1Le�8W)J�� VirtualLab Fusion一瞥
�kl]�V_ 7[ e%��e�.|+� 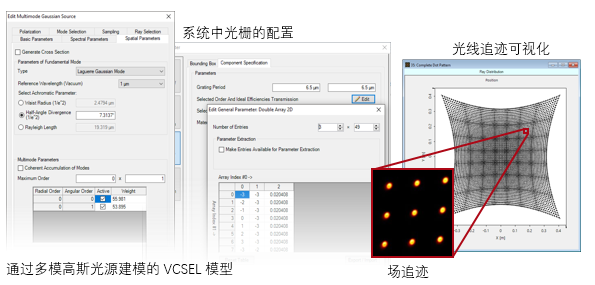 U�e
\A� ,� �!L.�R�"8!
U�e
\A� ,� �!L.�R�"8! VirtualLab Fusion中的工作流程
�U,�!qN�i} )�p>Cf_[. •设置多模信号源
� 0J+WCm�` −基本光源模型[教程视频]
Cc�U�F)$kz •设置组件的位置和方向
FO/c���Eu� − LPD II:位置和方向[教程视频]
2|j��=^� •在
光学系统内配置光栅组件
P%:?"t+J`; AO8 #l
YP? •参数运行的配置
�:;_}�G�xx −参数运行文档的使用[使用案例]
z-MQG�q�xR }K?b2� 6�` 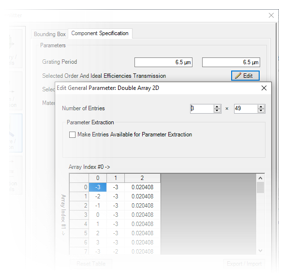 v7����p�u� ,a�&,R*r@&
v7����p�u� ,a�&,R*r@& VirtualLab Fusion技术
}<~(9_�+�� �n{N0S^��h 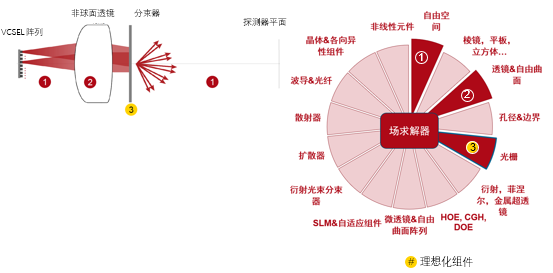 ry|a_3X(I�
ry|a_3X(I�



