机械补偿式连续变焦光学系统,通过系统的活动组分相对固定组分沿轴向运动改变各组分之间间隔尺寸,在保证系统像面稳定不变的前提下,连续改变系统焦距。系统中,最后一个固定组前的总组分数称为该连续变焦光学系统的组分数,比如含有一个前固定组、一个变焦组、一个补偿组以及一个固定组的变焦系统被称为三组分变焦系统。为保证各活动组分在变焦过程中按设计要求移动活动组分,保证其表面间隔尺寸,一般都使用凸轮结构驱动各组分的运动,因此,凸轮曲线的设计也必然是光学设计的重要任务。 �MI:��
rH�
��+�-DF3( 在进行凸轮曲线设计时,不仅要考虑凸轮转动时确保各活动组分之间准确的间隔尺寸,保证在变焦过程中光学系统像面的稳定,还要考虑到运动曲线的平滑性以及曲线的陡度,避免运动中的卡滞现象,当然还要考虑到凸轮加工的工艺性。 ;Av=/���hU
-�B`Nk�c�
(i1�J�De�� 图1.变焦系统凸轮优化设计窗体 r{cefK�JHg
初始数据填写以及各选择项的选择 (�Dy6I;�S
�YUzx,Y>k� 本程序可以对机械补偿式变焦系统进行凸轮优化设计,因此只有在输入机械补偿式变焦光学系统的数据之后才能进行。此时可从工具条的“设计”中选择“变焦系统凸轮优化设计” 菜单,此时界面上出现小窗体如图1。 n�x�����
� ① 初始数据的填写 {iGy@?d)zt 连续变焦系统的凸轮一般都是采用圆筒式结构,依靠凸轮的转动驱动活动组沿光轴方向按要求规律移动。为此在设计凸轮曲线之前先要给出凸轮圆筒的直径值以及凸轮转动角度值,然后要给出凸轮曲线的坐标点数,便于加工需要。同时为了满足加工和使用的要求,还必须在曲线的两端各增加一定数量点数的前后延伸曲线坐标参数。所以,在图1的界面上要求填写相应的选取坐标点数、前沿点数、后沿点数、凸轮直径以及凸轮转动角度等参数。填写完以上数据,点击“确定”键即可自动绘制凸轮运动曲线图。在此同时界面上还会显示一个书签式选项,分别提供绘制凸轮运动曲线、凸轮运动速率、焦距变化曲线、凸轮参数数据以及返回上一步等。 P3��W�n�so ans(^Up$� 图2.凸轮运动曲线系列 �N('=�qp9�
② 选择项的选择 o1kTB&E4B 从图2的界面上可以看出,通过对机械补偿式变焦系统进行凸轮优化设计,可以控制变焦组分的运动曲线的方程轨迹,也可以根据需要使得系统焦距值按需要的曲线关系设计凸轮曲线。一般情况下,为了活动组的运动灵活方便,主要考虑变焦组和活动组的运动连续平滑,运动曲线不要过陡,避免运动卡死现象。但有些系统为精确控制在变焦过程中达到精确变焦焦距值,也可以选择控制系统焦距变化曲线,使得凸轮转角是系统焦距变化的函数。 �.3X5�~�OH 在进行变焦系统凸轮曲线设计与优化时,可做如下一些选择。 xRX�2u_f$< Ⅰ- 控制项目的选择 ���S!Alno� 在进行变焦系统凸轮曲线时可以通过凸轮曲线设计与控制变焦组的运动规律,也可以设计与控制系统在变焦过程中系统焦距变化的规律,以便随时掌控系统焦距与凸轮运转的关系,此时可以通过下图中对控制项目的选择实现。 #x?Ku�\�ts
Y�FJw<�5�& C+0Mzf�Lgf 图3.控制项目的选择 �*�~�D�|�M
>>cb0f�H�5 图4.控制焦距变化曲线系列 ,4Q1[K�35B
Ⅱ- 绘制网络线的选择 y%�Q0*
_�� <���/hv{< 图5.绘制网络线的选择
��ty"�|yA� 图6.绘制网络线的选择 3X;��k c�>
Ⅲ- 凸轮曲线运动轨迹或变焦焦距变化规律的选择 e(=() :4is Fb!�Ew`;QT 图7.凸轮曲线运动轨迹或变焦焦距变化规律的选择
=Jk�PE2�mU 
图8.选择单纯曲线方式
ag_��*��Z\ 
图9.选择复合曲线方式 *:5S�*E&}V
Ⅳ- 提取变焦过程中任意样本的选择 Nmuz�A�Zr�
H;h$k]T��� 图10.提取变焦过程中任意样本的选择 t�)4><22of
一般光学设计程序是把连续变焦系统当做多重结构系统处理,只能计算和分析指定几个变焦位置。OCAD利用在计算凸轮曲线时提取变焦过程样本的方式,可以提取在变焦过程任意位置的样本变成定焦系统对系统进行分析和计算。在需要提取样本时,选择“提取样本”选项便可在右侧下拉菜单中选择位置号即可,样本总数为上方填写的“选取坐标点数”。可填写的点数可以是三位数或四位数。选择完成之后按“确定”键,当前变焦系统数据直接转换为该样本位置的定焦系统数据,自由进行分析与计算。 �|p �.�o�^
��H�zMr��� ③ 凸轮曲线的非线性化处理 y�T��xrbE�
�_xe�fF��y 为了控制变焦组或系统焦距变化曲线,可以把曲线设计成直线形状也可以按一定规律设计成二次或三次曲线形状。直线形状易于加工;曲线形状可以根据需要调节运动曲线陡度(斜率)。当选择曲线形状时,接口要求填写一个三次方程的三个系数的权因子值如图11。所谓系数的权因子是指三个系数的相对值。三个系数的实际值将由程序自动规化处理。 CN{xh=2qY[ (#�c�|San
图11.选择曲线运动轨迹的凸轮优化设计窗体 S-f
.NC}:i
以上选择确定或数据填写完毕之后,只要按“确定”按钮,便可自动完成凸轮曲线设计工作。设计结果如图12。从图13至图14可以看出,通过书签式接口可以方便地查看设计结果的凸轮运动曲线、凸轮升角曲线、焦距变化曲线以及凸轮参数数据等内容。其中凸轮运动曲线直接显示了系统变焦组和补偿组的运动曲线形状,还可从图上读出曲线各点的坐标值;凸轮升角曲线是根据设计出的凸轮运动曲线计算出的曲线上各点的斜率只值,从中分析凸轮曲线运动陡度,陡度过大就容易造成运动的卡滞,影响使用效果;焦距变化曲线显示了系统焦距随凸轮转动的变化关系,因为有些对系统焦距变化要求严格控制幷需要便于读取的系统,就必须在凸轮设计时控制焦距变化曲线。为了给出凸轮运动曲线的具体数据,选择凸轮参数资料书签,便可以直接读出所有设计资料如图15。对给出的数据可以直接在接口上进行进一步文字编辑、保存和打印。 22T�\�-g{� 0h=}BC�b+i 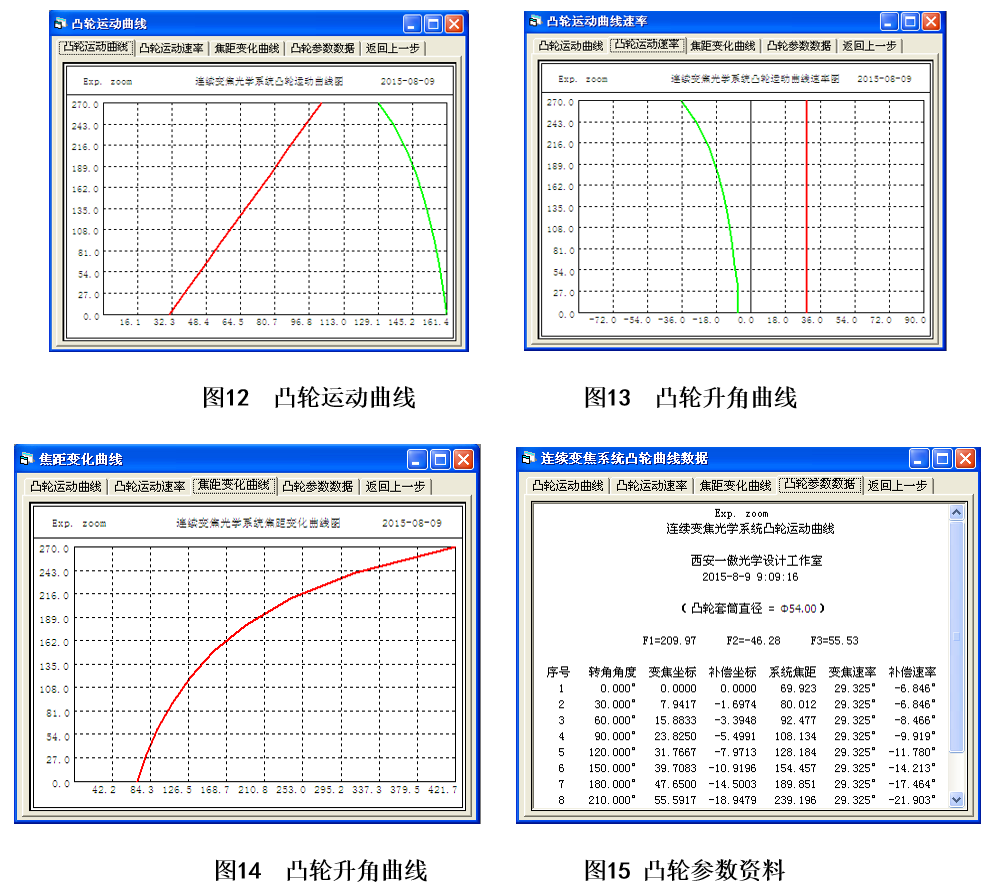 �r4i��sn^g
�r4i��sn^g
`SH1��4�A* ④ 计算数据数据格式的转换处理 O�"GuVC�}B
�^��Q\�Hy\ 为了更加灵活的保存和打印计算结果数据,程序还可以方便地保存成Excel的表格形式。操作时只要选择工具条上“另存入”菜单,选择“Excel files(*.xls)”或“Word files(*.doc)等格式幷指定文件名即可。Excel表格形式的文件如图16,Word 文件格式的文件如图17。
mo?*nO|- b9�xvL�R�8 图16.Excel 文件格式凸轮参数数据
7D�K�Td^^M 
图17.Word 文件格式凸轮参数数据



