W@��L��3+4 F
S�M�j��
 +,�'�T=Ic{ ��H(+<)�qH
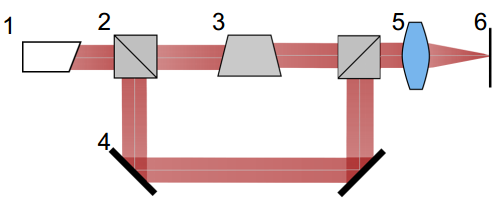
+,�'�T=Ic{ ��H(+<)�qH Ince-Gaussian模是近轴波动方程的第三个完整的精确和正交解族,与Hermite-Gaussian模和Laguerre-Gaussian模并列。由于高斯模式具有多样的横向模式。在本文件中,按照Chu等人[Opt.Express 16,19934-19949(2008)]的步骤,使用Dove棱镜嵌入非平衡马赫-曾德尔干涉仪来
模拟基于Ince-Gaussian模式的涡旋
阵列激光束的产生。所提出的干涉测量装置产生的涡旋阵列激
光束在传播过程中,也通过聚焦,保持其光束轮廓。因此,所提出的涡旋阵列激光束在二维阵列形式的光镊和原子阱中具有巨大的应用前景。
\L!uHAE2a� `%K`�gYhG1 任务描述 �m/&i�9��A �:LJ7ru�2� 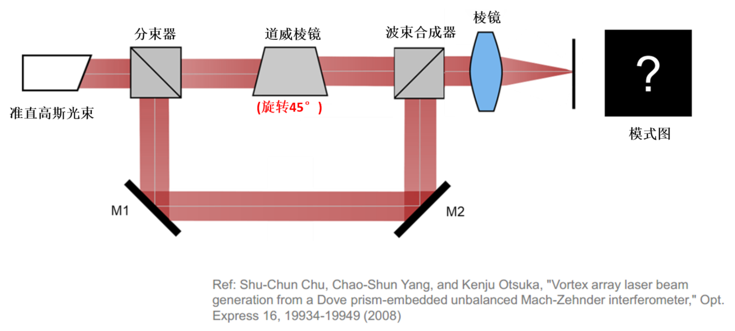 |fsm8t�<~8 MKGS`X]�<J 在VirtualLab Fusion中建立系统 UP1?5Q=H]Q 系统构建块-光源 .,2V�5D-${ Pd�=,$U�Qp
|fsm8t�<~8 MKGS`X]�<J 在VirtualLab Fusion中建立系统 UP1?5Q=H]Q 系统构建块-光源 .,2V�5D-${ Pd�=,$U�Qp 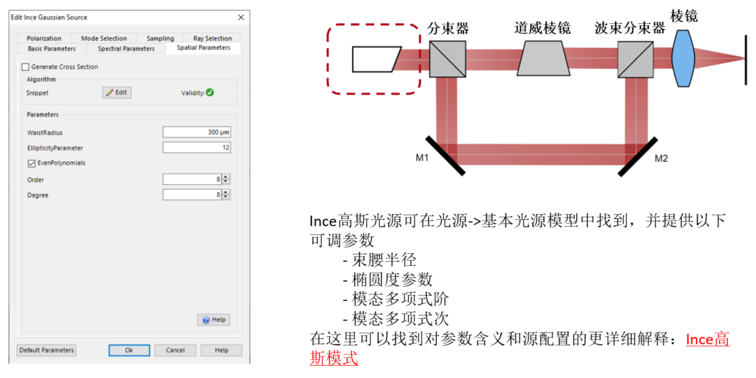 bPD�)D'Hs� ]o�.vB}WsY 系统构建块-组件和检测器 (Clhbfz�D� �#m. A���N
bPD�)D'Hs� ]o�.vB}WsY 系统构建块-组件和检测器 (Clhbfz�D� �#m. A���N 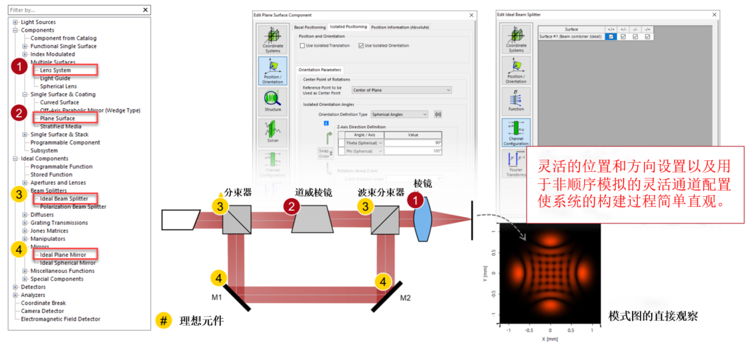 :1f�ag�aPg ^%bBW�6�eZ 涡旋阵列激光束产生的模拟 O??vm�?eo� @Z(�rgF{{
:1f�ag�aPg ^%bBW�6�eZ 涡旋阵列激光束产生的模拟 O??vm�?eo� @Z(�rgF{{ 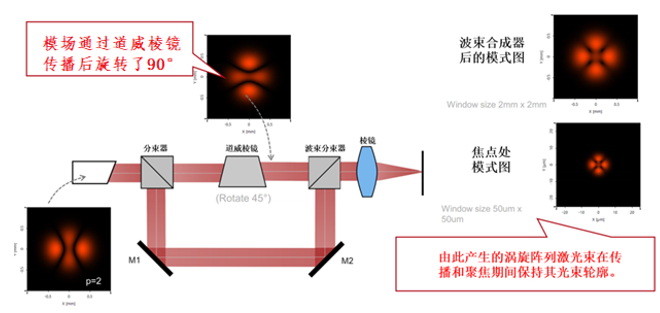 B:oF;~d/�, �,cH�U)��j 光源中使用不同模态阶数生成涡旋阵列 7�Ur?�e��p W*�T{,M@Y�
B:oF;~d/�, �,cH�U)��j 光源中使用不同模态阶数生成涡旋阵列 7�Ur?�e��p W*�T{,M@Y� 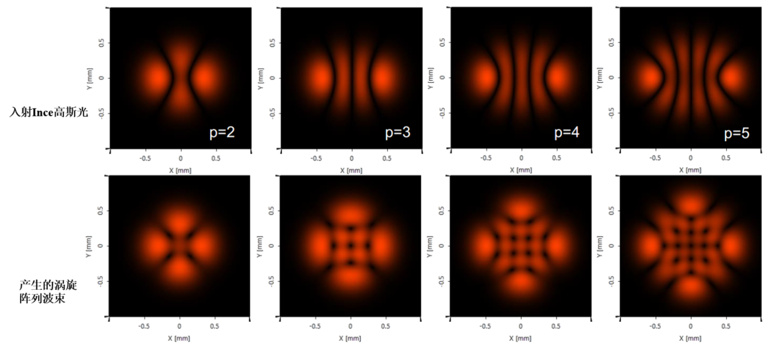 ���{XY3X�o ,�TC�~~EWq 椭圆度参数对涡流阵列方向图的影响 �))#'4���� E{^^^"z� P
���{XY3X�o ,�TC�~~EWq 椭圆度参数对涡流阵列方向图的影响 �))#'4���� E{^^^"z� P 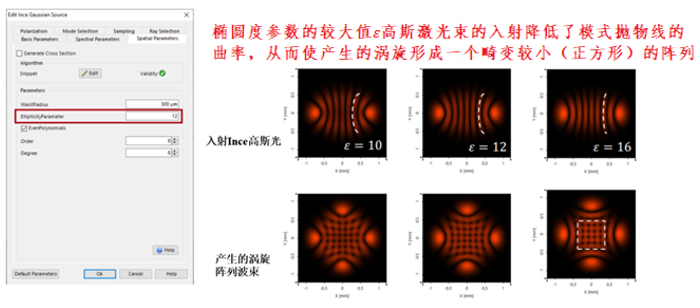 9Ld9N;rWm# M=!�i�>(yG 小结-系统光路图 Z[#IfbYt��
9Ld9N;rWm# M=!�i�>(yG 小结-系统光路图 Z[#IfbYt��
U���b)I66�
 jp<VK<�s�] �)q^ B��j$
jp<VK<�s�] �)q^ B��j$ 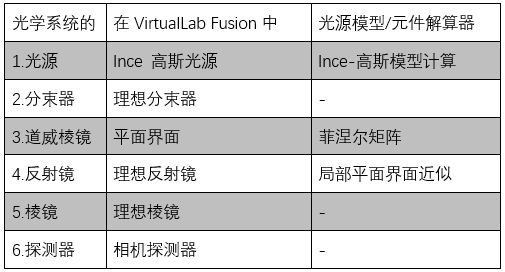 ~u�aP�$*B[ �cy3w��w}) VirtualLab Fusion的工作流程 tB6k|cP��C
~u�aP�$*B[ �cy3w��w}) VirtualLab Fusion的工作流程 tB6k|cP��C · 设置输入场
%�]�4-{�%v -基本光源
模型[教程视频]
Df=q-iq<{/ -Ince-Gaussian模式[使用案例]
QX��Q����� · 使用曲面构造真实组件
�D[Iq����n · 定义零部件的位置和方向
V�u]�h4S�: -LPD II:位置和方向[教程视频]
+�$pJ5�+v� · 为非序列追迹正确设置通道
YB!!/ SX4� -非序列追迹通道设置[使用案例]
2_pz�3<,\� (�aKZ5>>cN  Ti= 3y497S S� ~|.&0"\ VirtualLab Fusion 技术 !oM�t_k X� g()m/KS<��
Ti= 3y497S S� ~|.&0"\ VirtualLab Fusion 技术 !oM�t_k X� g()m/KS<��