-
UID:317649
-
- 注册时间2020-06-19
- 最后登录2026-06-05
- 在线时间1977小时
-
-
访问TA的空间加好友用道具

|
1. 摘要 y; LL^:rq
�nH��*��JR
VirtualLab Fusion包括一系列建模方法便于用户可以地调整光学仿真的精度级别和时间。不仅如此,这种功能还有助于隔离物理原因产生的不同影响。在本示例中,我们提出了一个清晰的工作流程配置一个仿真,以便在物理光学模拟中考虑或忽略衍射效应。 �.(T*�mk*>
Ke0��j8�|�
 |tl�4I2AV �WEg�J_�dB 2. 建模任务 r(g�:b�
^S |tl�4I2AV �WEg�J_�dB 2. 建模任务 r(g�:b�
^S
}GV5':W@WG 如何在FieldTracing 2nd Generation 引擎中控制衍射的包含。 @�Vl��Di1�
R�-Y07���A
 �iYw�zd�W1 3. 概览 p*F.WxB�)4 �iYw�zd�W1 3. 概览 p*F.WxB�)4
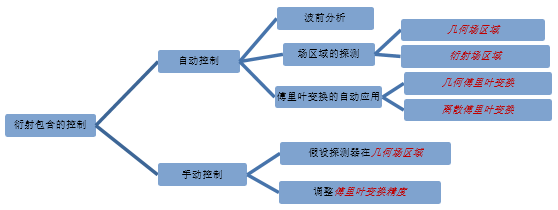
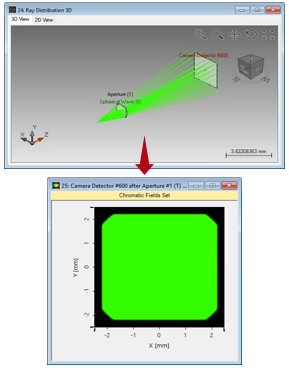
� xY]���Y� 在一个由球面波、孔径和相机探测器组成的试样系统上显示了如何控制包含衍射的工作流程。 AN-qcp6�=o 首先,利用光线追迹引擎对系统进行不包含衍射的分析; �6_`��9
4+ 然后,使用场追迹引擎对系统进行分析,其中包含的衍射通常是自动包含的,但是可以通过不同的用户设置来控制。 7noxUGmFw�
]�3B8D�<�p
 n�o6q3<�re 4. 光线追迹系统分析 p%;n4*�b2� n�o6q3<�re 4. 光线追迹系统分析 p%;n4*�b2�
b^W����T�X
VKI`@�r�Y4
光线追迹系统分析器 �=ELl86=CG
- 通常开始使用光线追迹系统分析器(Ray W�vV!F?uqZ
- Tracing System Analyzer)分析您的系统。 /�C�R��Z��
W dM?{;�
#
 ��|$�AoI�� ��|$�AoI��
h B@M5M�c$
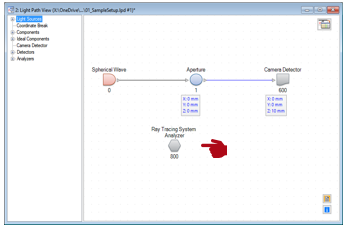
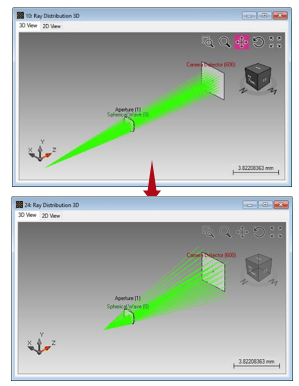
用于演示工作流程的原理设置包括 VJp��; X�M
- 球面波,默认设置,但距离输入平面(Distance to Input Plane)10毫米; !% '�dy�j�
- 矩形孔径,矩形孔径(Rectangular Aperture)为1mm×1mm; zQpF,��N<b
- 相机探测器默认设置。 <�k�J,E[4`
9 b�?Nlk8d
 �JL[xr�K0� �JL[xr�K0�
�46�p%��y�
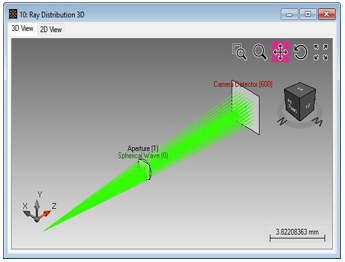
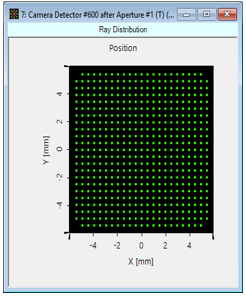
光线追迹引擎 �r$7zk<0�1
- 接下来,应该使用光线追迹引擎检查探测器的输出,而不包含任何衍射效应。 >�"}z
%� #
Zd�cG6�IG+
 ?]1_�� 2\M IdP"]Sv{�< 5. 场追迹系统分析 >M~w�Fs�$~ ?]1_�� 2\M IdP"]Sv{�< 5. 场追迹系统分析 >M~w�Fs�$~
�?<mx���v"
)#|�I(Gz ^
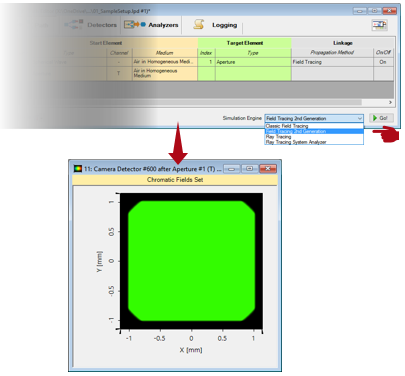
第2代场追迹 t�|/{�oAj�
- 现在,该系统可以在不包含衍射的情况下通过场追迹进行分析。 �.(D,CGtYb
- 这必须在检测器设置中通过激活复选框来设置,假设检测器评估的几何场区域。-因此,探测器上的强度图没有显示出任何衍射效应。 Cp[{|�U-?G
 %3ieR}:/e& %3ieR}:/e&
=�\[��}@Kh
�2h:*lV��^
 tC�oT-\�Q� x�^�0MEsR� tC�oT-\�Q� x�^�0MEsR�
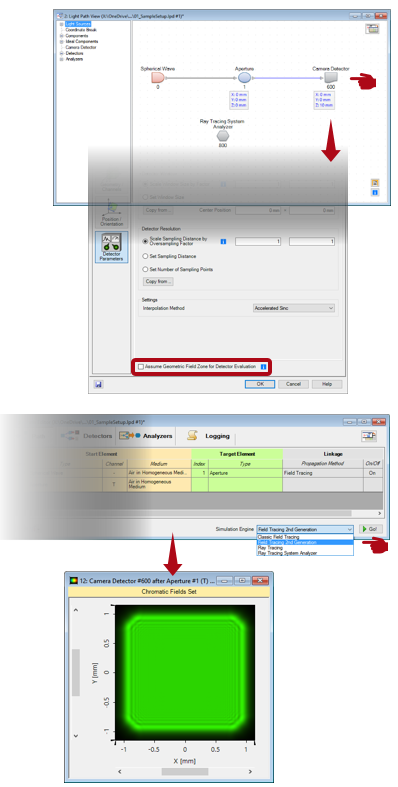
第2代场追迹 QC/%|M0 {�
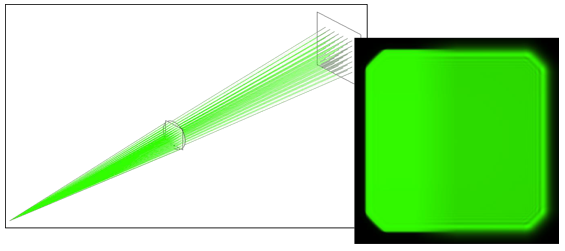
- 现在,该系统可以在包含衍射的情况下通过场追迹进行分析。 �()Cw;N�{E
- 这必须在检测器设置中通过不激活复选框来设置,假设检测器评估的几何场区域。 �?+^vU5b1u
- 在VirtualLab中,所需包含的衍射是由引擎自动决定的。 �]Ak�/:�pu
- 因此,探测器上的强度图显示出衍射效应。 Y�w�YCXFQ|
@nPXu2c?u7
 Y/|�wOm;|� xfAnZBsV�o Y/|�wOm;|� xfAnZBsV�o
第2代场追迹 �;t�y08�D/
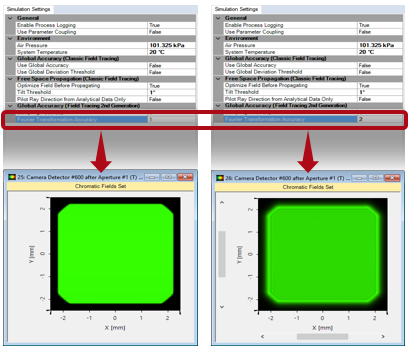
- 在这个示例中,可以通过减小球面波到孔径的距离来减小衍射的影响。 d5 U?*����
- 因此,到球面波输入平面的距离减小到3mm。 BRSOE U�\=
- 在某一点上,场跟踪引擎切换到强度模式的纯几何评估,而不考虑衍射。 Aw7oy��C!�
- 在第2代场追迹引擎的仿真设置中,通过提高傅里叶变换的精度,可以再次增加衍射的包含。 Vdpvo;�4uy
 �;s$bVG�Hr �;s$bVG�Hr
 B�Ay]&q�|. B�Ay]&q�|.
 6. 文件信息 Qj:`[#3?2� ?G|���*=-8 6. 文件信息 Qj:`[#3?2� ?G|���*=-8
 �vC�j,�aSW Z+3j>��_Ss �vC�j,�aSW Z+3j>��_Ss
-D?-ctFYj^ QQ:2987619807 �CVa?L"lK�
|



