��飺
����̽��Ͳ��
ϵͳ(LIDAR)
|H4/��a;]~ ��'n�M�)=� �����ĸ�ʾ�������ʾ�����ʹ��OptiSystemģ�����Ͳ��ϵͳ��LIDAR�����������£�
-l!;PV S|� �PiR�bd�l �����������ʱ�����
W�%=b|�6E ���Ʋ��
�R3$K[�Lv, ��Ƶ��������FMCW��ֱ�Ӽ����͵�Ƶ��������ɲ��
FF�N��v'\) 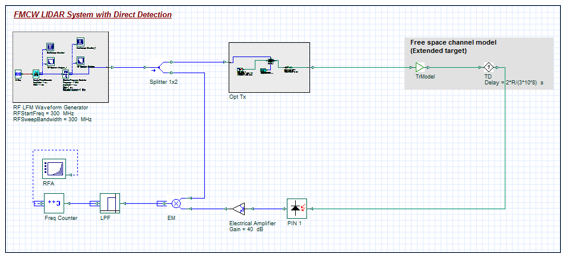 rtz%(�4aS t3 q0|�S��
rtz%(�4aS t3 q0|�S�� ͼ1.ʹ��ֱ�Ӽ���FMCW LIDAR OptiSystemģ��ʾ����ͼ
�Iz#�h:�O� P2`!)�te�N 1.���(����ʱ��)
U�9KnW]O%" 5"[Qs|VjA6 ԭ�����
Z�=Oo%lM6B zA!�[c l>$ ʹ�ü������壬����ʱ���෨������������ӷ���װ���н���Ŀ�겢���ؽ����������ѵ�ʱ�䡣 Ȼ��������[1]
Z�;�_W���U  dfo{� B/+� $e! i4�pM�
dfo{� B/+� $e! i4�pM� c�ǹ��١�
v��|XEC[F �shlL�(&Py �����ź�
�����Ǹ�����չĿ��
ģ��ȷ���ģ���������[2]
c4�R6E~�S�  P�v`^#B�X' `bGA�c&,&�
P�v`^#B�X' `bGA�c&,&� ���� Pt �Ǵ����ʣ�D �ǽ��������� �� Ŀ�귴���ʣ�

�Ǵ������ϵ����

�ǹ��ϵͳ������ӣ�R ��Ŀ�귶Χ��
ES��Z�6<!S �CW Y'�q� Ϊ�˿ɿ���ȷ����������ij���ʱ�䣬ʹ�ú�ȶ�ʱ����[3]��������Cpp���ʵ�֣���
(s,*�soAN� 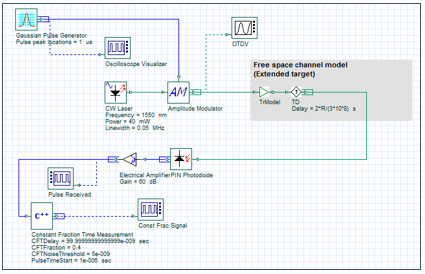 bQ��=R�,�� :G�|�Jcl=r $o`��N%�]
bQ��=R�,�� :G�|�Jcl=r $o`��N%�] ͼ2.����ǣ�TofF������
u8*Uia*vwH /��._�wX�H Ӧ�ð���
EY(�@R2~#J i%M�2(8&^Q �����ʾ���У�һ����˹����(��ֵ����ʱ��= 1 us) ������������Ŀ�귴��(�����ɿռ��ŵ�ģ�� (��չĿ��)����) ) ������˥�����ӳٺ�ͨ��Cpp�����ȶ�ʱ���������ͺ������յ����źš�
�Rp)82�-
. ztG_::QtG] ���յ����������ڳ���ʱ��6.02e-06�봥���ģ��������ָ÷�ΧΪ751.27 m����ȫ��
������Χ����Ϊ750 m��Ƚϣ��� ͨ���ı��������CFTDelay��CFTFraction��CFTNoiseThreshold�����ĺ�ȼ������������ȡ�
b0�i�]T�?# 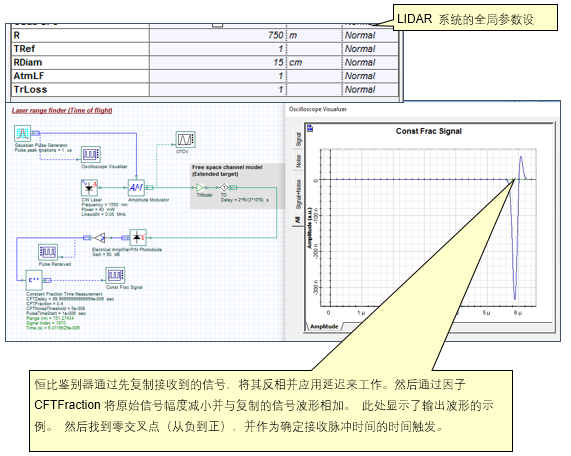 w*ig[{
��I �5w`v
3o��
w*ig[{
��I �5w`v
3o�� ͼ3.������ϵͳ
�h�]<Ld9�� p3*}!��ez4 2.���(����)
=@m|g�� �) n�-dO �|3, ��������/Ŀ��ľ������һ�ַ�����ʹ�����Ʋ���ǡ� ���ø÷�����
��Դ���ض�Ƶ��Rf�����Ʋ��ҳ���Ŀ�괫�͡� Ȼ����PIN�������ܸ�������������ⷴ���źš� ������Դ��Ͷ����ź� ()������ԭʼ�ο��ź����Աȣ��Խ��в��������ڼ������ [1]:
�KX9+*YY,�  Q^8C*ekfg! 5�ise�jR{r
,|b�<as@X
Q^8C*ekfg! 5�ise�jR{r
,|b�<as@X Ϊ����߸�ϵͳ��
�������ο��ͽ��յĵ����źſ����뱾������RLO��ϣ��Խ����յIJ��α�Ƶ���ϵ͵�Ƶ�ʣ�RLO-Rf���� Ȼ�����Щ�źŽ��д�ͨ�˲����Լ���������������λ�ƣ�ʹ�����ǵĿɱ��Cpp��������д�����
+E �QRNbA� 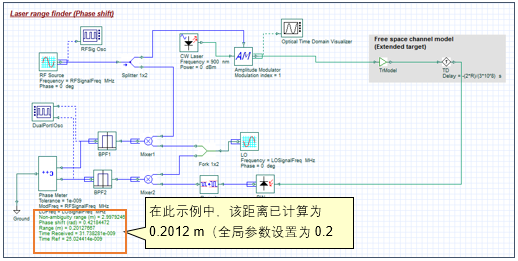 _EOQ*K#=Ct D:ll�GdU#2 &gk�lo�P�@
_EOQ*K#=Ct D:ll�GdU#2 &gk�lo�P�@ ͼ4.����ǣ����ƣ�����
s}� ,�p�>8 �"!gd)^<�e 3.���(FMCW)
C�}��+w�< UR?[ba_h�� �������ķ����ǵ�Ƶ��������FMCW��LIDAR�� �Ѿ�����������ģ�ͣ�ֱ�Ӽ���FMCW LIDAR����ɼ���FMCW LIDAR�� ����ģʽ�Ĺ���ԭ����ͬ�� Ƶ�ʵ��ƵĹⷢ���������źŵ�Ŀ�꣬����ͨ��
����������ⷴ���źŲ���ԭʼ���Ե�Ƶ��LFM���źŻ�ϡ� ���Ž����źŵ�ʱ�ӣ�������Ƶ�źš� ʹ��Ƶ�ʼ������������ǵ�Cpp���ʵ�֣�����������Rf�źţ�Ȼ���������¼���[4]��
)[6H�!�y�5  |-I[{"6q$@ �l�?�B\TA^
|-I[{"6q$@ �l�?�B\TA^ ����RampPeriod����ȫ�ֲ�����Time window ��DeltaFreq ���ڲ���RFSweepBandwidth������ϵͳRF LFM Waveform Generator��������������ã���
'1=�t{Rw� �b�zm�T.!� �������ϵͳ֮���Ψһ������ʹ��ƽ���ɼ첨������һ��ʹ�������������ڻ��ǰ�ָ�������źţ���������ṩ���ߵ������ȣ���Ϊ��������ɢ���������ƣ�
j �ij:}.d6 �]]+�wDhxH 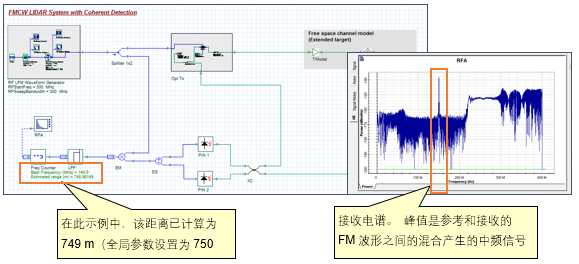 5 �%q�26�& }�}Eko�7'^
5 �%q�26�& }�}Eko�7'^ ͼ5.FMCW��ɼ�Ⲽ��
�G7�`7e@�{ [1]: Laser ranging: a critical review of usual techniques for distance measurement, Optical Engineering, Vol. 40, No. 1. (2001), pp. 10-19 by Markus C. Amann, Thierry Bosch, Marc Lescure, Risto Myllylä, Marc Rioux[2]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques for FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection and Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013) Fp-d69�Npo [3]:Fast-Timing Discriminator Introduction, Ortec Inc., http://www.ortec-online.com/-/media/ametekortec/other/fast-timing-discriminator-introduction.pdf?la=en (accessed 10 Feb 2017) &-9��wU�Z [4]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques for FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection and Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013)



