| infotek | 2024-11-21 07:56 |
使用相干光模拟马赫泽德干涉仪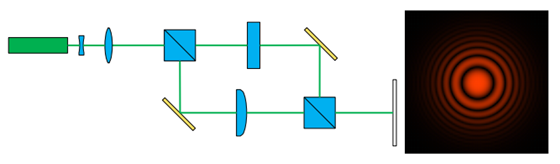 应用示例简述 1. 系统说明 光源 — 氦氖激光器(波长632.8nm;相干长度>1m) 元件 — 分束器和合束器,消色差准直透镜系统,位相延迟器,待测球面透镜 探测器 — 干涉条纹 建模/设计 — 光线追迹:初始系统概览 — 几何场追迹加(GFT+): 计算干涉条纹。 分析对齐误差的影响。 2. 系统说明 参考光路  3. 建模/设计结果  4. 总结 马赫泽德干涉仪的干涉图样的计算 1. 仿真 以光线追迹对干涉仪的仿真。 2. 计算 采用几何场追迹+引擎以计算干涉图样。 3. 研究 不同对齐误差在干涉图上的影响,如倾斜和偏移 利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分析。 应用示例详细内容 系统参数 1. 仿真任务:马赫泽德干涉仪 通过使用这种干涉仪设置,可测量两完全相同光束线间的相对相移。 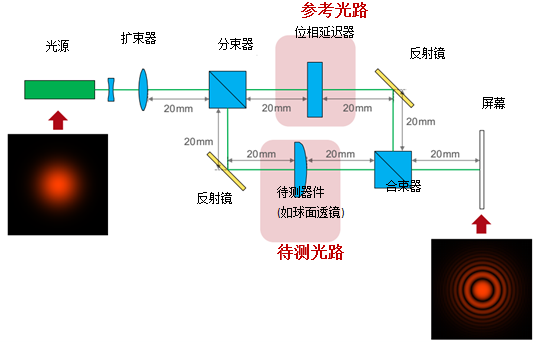 这使得可以对一个样品元件引起的相移进行研究。 2. 说明:光源 使用一个频率稳定、单模氦氖激光器。 因此,相干长度大于1m 此外,由于发散角很小,所以不需要额外的准直系统。 在入射干涉仪之前,高斯波以瑞利长度传播。  3. 说明:光源 采用一个放大因子为3的消色差扩束器。 扩束器的设计是基于伽利略望远镜。 因此,在光学表面序列(OIS)中结合了一个扩束和准直系统。 与开普勒望远镜相比,在扩束系统中不会成实像。 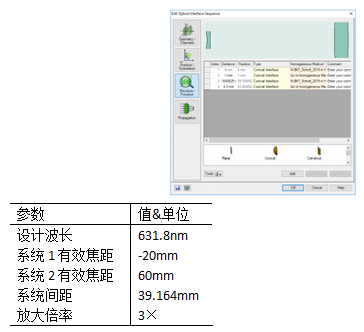 4. 说明:光学元件  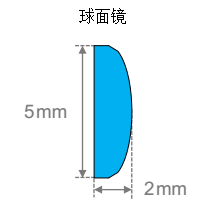 在参考光路中设置一个位相延迟平板。 位相延迟平板材料为N-BK7。 所研究的元件为球面镜,其曲率半径为100mm。 透镜材料为N-BK7。 其中心厚度与位相平板厚度相等。 5. 马赫泽德干涉仪光路视图 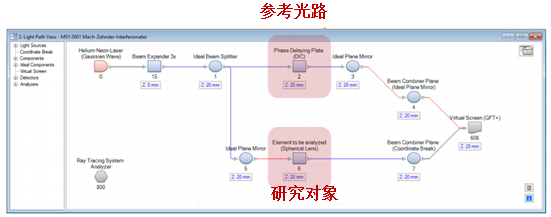 增加消色差系统和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 由于VirtualLab的相对位置系统,必须设置Z轴方向的距离。 [/td][/tr][/table][/td][/tr][tr][td] [table=772][tr][td][table=712,#ffffff,,0][tr][td] 6. 分光器的设置  为实现光束分束,采用理想光束分束器。 出于该目的,在光路编辑器中建立两次光束分束器。 随后的组件(如相位延迟板和理想的反射镜)连接到通道0和通道1,对应于两个光束分束器 7. 合束器的设置   两束光的直接通过虚拟屏幕探测器进行叠加(GFT +)。 为此,必须选择两个输入通道的叠加,才能得到期望的干涉图。 8. 马赫泽德干涉仪的3D视图  增加扩束器和分束器距离是为了使3D视图更加清晰(可在光路编辑器中实现)。 应用示例详细内容 仿真&结果 1. 结果:利用光线追迹分析 首先,利用光线追迹分析光在光学系统中的传播。 对于该分析,采用内嵌的光线追迹系统分析器。 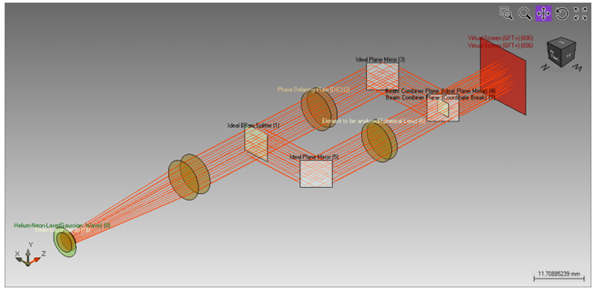 2. 结果:使用GFT+的干涉条纹 现在,利用几何场追迹加引擎计算干涉图样。 由于采用高斯光束,图形边缘光强衰减迅速。 因为干涉长度大,干涉条纹显示出较明显的极大值和极小值。 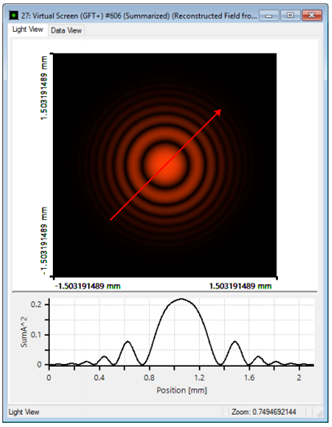 3. 对准误差的影响:元件倾斜 元件倾斜影响的研究,如球面透镜。 因此,通过使用独立方向和参数运行,原件角度由0°变化至5°。 结果可以以独立的文件或动画进行输出。 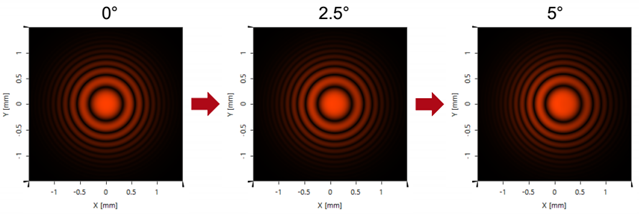 4. 对准误差的影响:元件平移 元件移动影响的研究,如球面透镜。 现在,通过使用独立位置和参数运行,组件X位置有0mm修正为0.5mm。 结果同样可以以独立的文件或动画进行输出。  5. 总结马赫泽德干涉仪的干涉图样的计算 4. 仿真以光线追迹对干涉仪的仿真。 5. 计算采用几何场追迹+引擎以计算干涉图样。 6. 研究不同计算误差在干涉图上的影响,如倾斜和偏移 利用VirtualLab软件可对马赫泽德干涉仪生成的干涉图案进行研究分。 扩展阅读 1. 扩展阅读 以下文件给出了在VirtualLab中如何设置测量系统的更多细节。 开始视频- 光路图介绍 - 参数运行介绍- 参数优化介绍 其他测量系统示例: - 迈克尔逊干涉仪(MSY.0002) |
|