c�q�`v�8��
关键词:光线追迹,镜头,优化,曲率半径,设计 -QL�_a8�NL
n7��`R+4/s
1.描述 V��6Kw71'9
�dEU��+\NY
▷ 在该示例中,我们介绍了如何利用VirtualLab软件中的光线追迹引进行参数优化。 2xvT�ijO0
▷ 在此示例中,对一个球面透镜进行优化,使其在透镜后指定的距离上生成聚焦光斑。 T]�\_[e:'
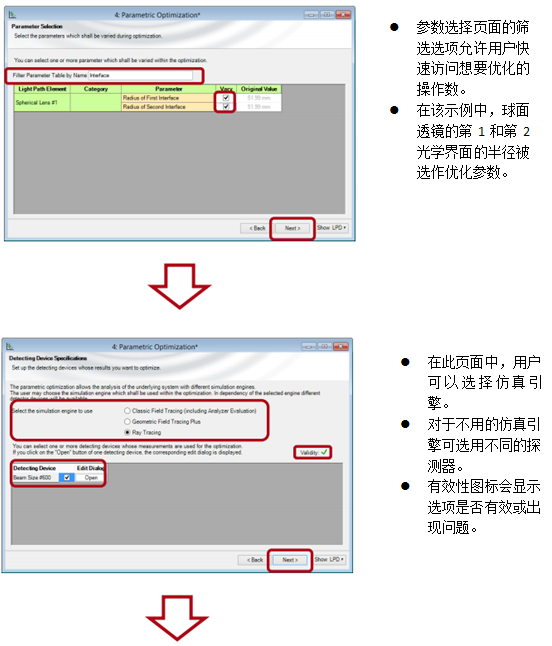
▷ 球面镜的光学界面的曲率半径被设计为自由变量。 Zr,�:i
MPZ
12;"=9e��!
2.系统光路图及系统配置 m�G2*s� ^$
�~"89�NVk"
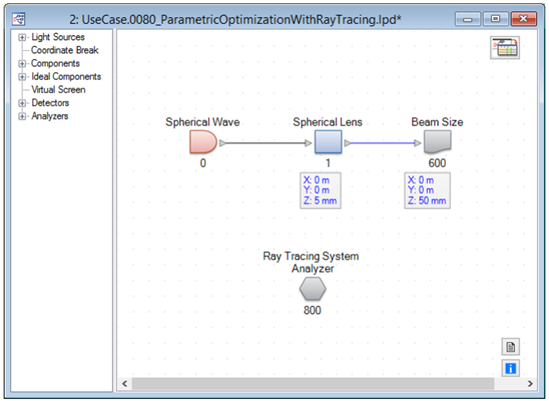
文件名:UseCase.0080_ParametricOptimizationWithRayTracing.lpd dieGLA<5_X
&*\wr�}�a!
▷ 该光学系统由球面波照射一个球面透镜组成。 Fyy)665�x/
▷ 通过设计,使透镜的焦点位于透镜后50mm的位置。 �[(U:1&x�&
▷ 在目标平面处,利用光束尺寸探测器计算光斑的大小。 �y@"6D�t|�
▷ 光束尺寸探测器提供了几个选项,包括利用光线追迹引擎评估光斑的大小。 V�Sa\�X�~�
▷ 用户可以选择测量方法(RMS或峰值)进行计算,也可以附加参数。光束尺寸探测器参数窗口 E7-il;`cKn
>%k:+�+�b{
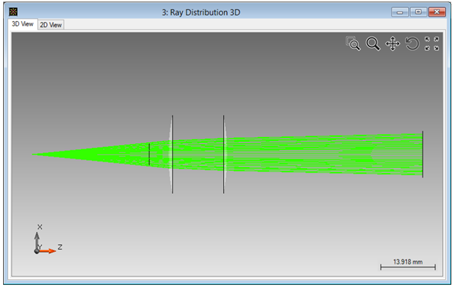
3.初始系统的光线追迹结果(3D) 1�w}%>e�-S
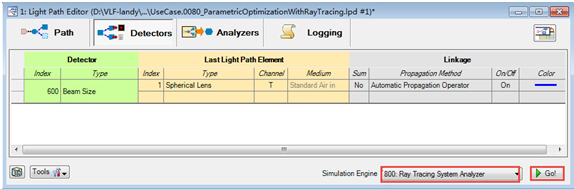
选择光线追迹系统分析器,点击Go! 初始系统光线追迹结果 a#�t:�+iw�
�s(W]>�Ib
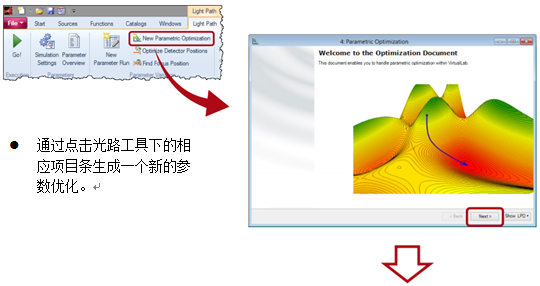
4.参数优化的生成 &�U%AV�D�[
hnag����<=
SW|{��)�L,
5.设置参数优化 F��)'��kN2
 '{+�5��+ J '{+�5��+ J
$�s-/�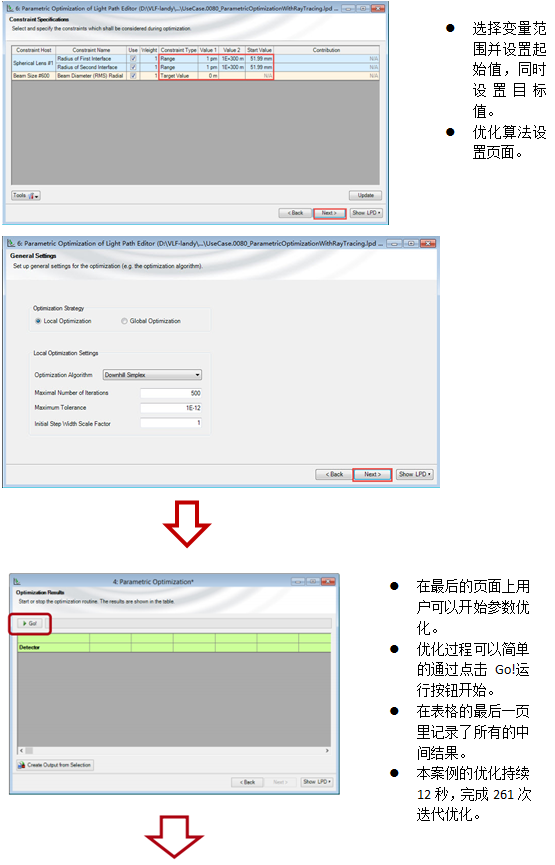
Q[��E�pE,
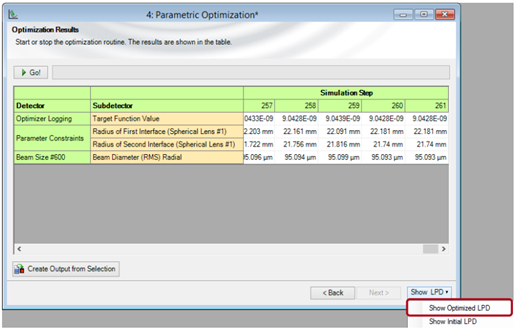
6.参数优化结果 Jhd�o#}Ub�
pEf1[� z�q
Q�$!dPwDg�
优化结果页面,选择“显示优化后的光路图”(”Show Optimized LPD”)可以获得优化后的光路图 �BH"f�\o�c
�{��\�3ZmF
7.优化后系统的透镜参数 r�nW�(<�t"
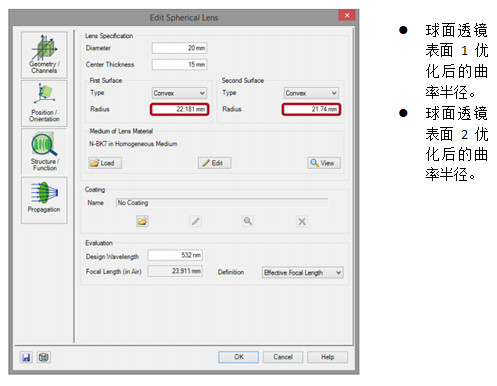 �D+G?:m��R �D+G?:m��R
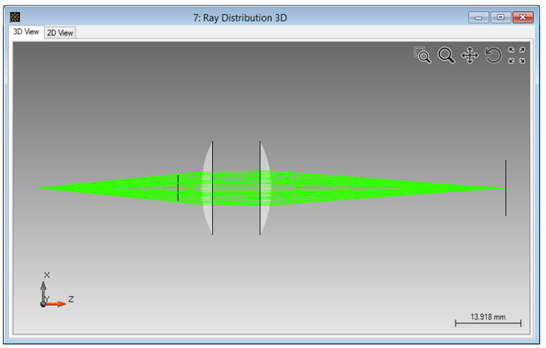
8.优化后系统的光线追迹结果(3D) �M:6Yy@#T.
通过使用光线追迹系统器(Ray Tracing System Analyzer)获得光线追迹三维结果 �3o��X\q/$
�g,�Z8I;A^
9.总结 r��w�(EI,G
cKt=�_4�Lf
▷ VirtualLab Fusion可以用来完成光学系统的光线追迹仿真。 j4h�6p(�w{
▷ VirtualLab提供了三维光线追迹和二维光线追迹(点列图生成及自定义评价函数)。 P%w��)*);�
▷ 在VirtualLab的参数优化过程中所有的引擎模块都可用。 ]E/^�(T-O�
▷ 通过一个参数的优化可以利用光线追迹完成对光学系统的优化。 ��.}
al s�
▷ 可以使用不同的优化算法。 |