�9R>A,x(��
关键词:光线追迹,高数值孔径,点列图,光斑尺寸
-�N5r�[*>
�F.?:G�d1�
1. 描述 8c+i+g��p!
■ 该案例中阐述了如何利用VirtualLab对一个具有高数值孔径的透镜系统进行分析。 *|$s0ga� C
■ 我们将对焦面前和焦面上对三维光线结构和二维点列图进行讨论。 � 2b1LC!'U
■ 此外,VirtualLab可用于测量焦平面上的光斑尺寸。 ��%S>lPt��
-�sO� E�L{
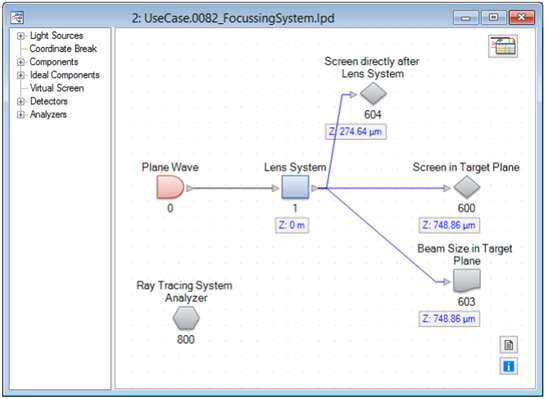
2. 系统 :�@_CQc*yB
文件名:UseCase.0082_FocussingSystem.lpd ��]ZO^@sH�
B�_`A[0H��
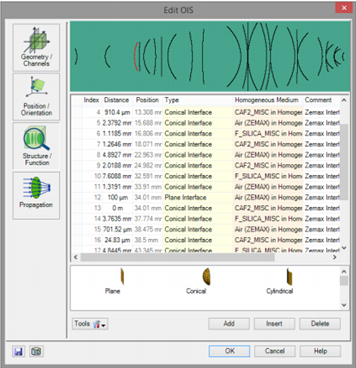
3. 透镜系统组件编辑 @[zPN[z��.
l�qqY5l6�j
■ 在光路视图中双击透镜系统元件,可以显示元件编辑窗口。 ���BEP�Dyy
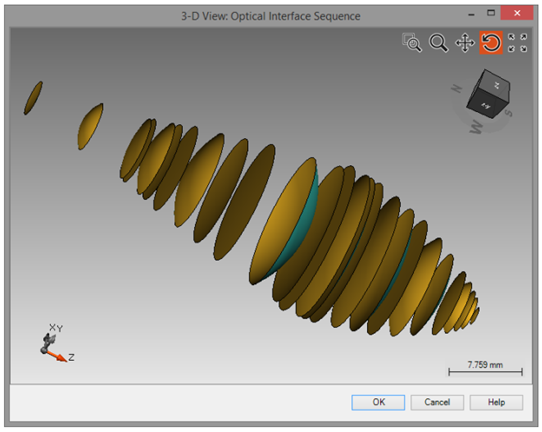
■ 透镜系统是由序列光学表面(OIS)定义的。 A �&w)@DOe
■ 每一个可选项都有独立的参数,并可以设定。 &�[�S)zR=?
■ 包括序列光学表面和光学介质。 ��y��+Q!4A
HtY\!_�E�a
"�5X�D+q�i
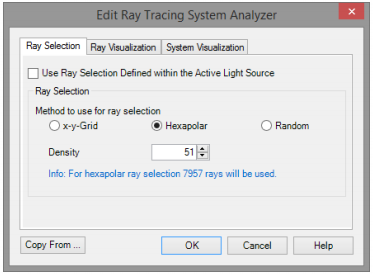
4. 光线追迹系统分析器-选项 5[I>� ��l
Jd1eOe�S�
sXoBw.^Ir_
■ 分析器允许用户指定使用光源的光线选项。 sdS<-!
%u4
■ 可以选择选取光线的方法: z(1h�^.
— 在x-y-网格 ~<v`&Gm?"�
— 六边形 �^� 9;s
nr
— 自由选取 M P0ww�$(�
■ 每一个可选项都有独立的参数,并可以设定。 6g�akop�ZO
zCO5��`%14
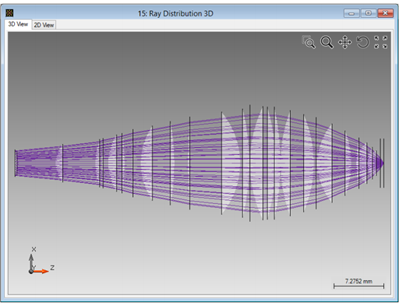
5. 系统的3维视图 �w�'�M0Rd]
 A!iH g__/t A!iH g__/t
6. 其他系统参数 {!��^�HG�+
■ 系统由单色平面波照明 �?3KI}'}EM
■ 照明波长266.08nm ��n0Ze9W+<
■ 后端的探测器用来分析透镜系统的性能: ?/#H�Tg)!B
— 一个虚拟屏直接放在透镜系统后面。 ( }�JX ]-�
— 一个虚拟屏位于焦平面 �K��h<v2��
— 光束尺寸探测器置于焦平面 y*Ex5�N~JC
■ 焦平面位于透镜系统后端748.86um处。 9Od
Kh\F (
v~��uwQ&AH
�l�t,��x(2
?_�<ZCH��
CoJaV�Ll�
7. 光线追迹系统分析器的结果 {�j�:{wW�.
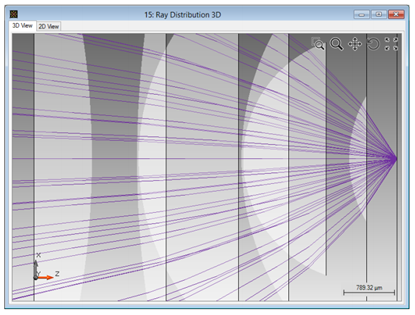
光线经过整个光学系统的三维视图 j nI)�n*��
光线经过整个光学系统的三维视图(局部放大) �%*}J�Dx#@
�Fdc�� bmQ
T'Jw�\u>"R
M�lRgdVX�
%��5F=!(�w
V3@�^bc!��
d��hm���;�
8. 透镜系统后虚拟屏的结果 K3
]hUe�#
%�K� ]��u"
_Seiwk���&
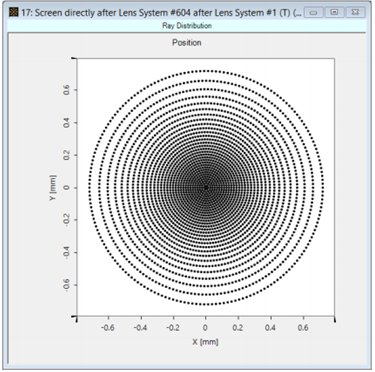
■ VirtualLab可用于计算点列图。 OY"{X�nPZ�
■ 左侧图片显示了直接位于透镜后的虚拟屏所获得的点列图。 Pq7�YJ"Z?:
■ 默认情况下光线显示的颜色比此波长的颜色。本案例中我们使用的是非可见光。 Bv�X!n"QIb
■ 你可以通过下面的操作将背景颜色该为白色 �>2�V�B�.f �>2�V�B�.f
Q~-g�tEv+&
9. 焦平面上的结果 o6vm(�I��%
>b�{%j8u�M
C=PBF\RkKu
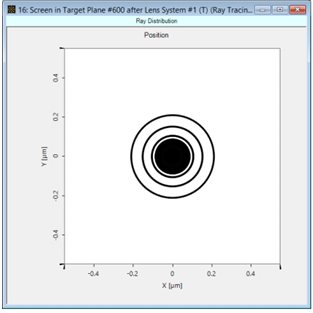
■ 在左侧图片中可以看到焦平面上计算出的点列图。 D�eXn�E$XH
■ 在探测器结果(Detector Result) 标签下,给出了光束尺寸。 b���GwLfU
■ 焦平面上的光斑尺寸为183mm PjsQ�+�5[>
■ 此外,背景颜色也可以预先设置。 deeOtco$LT
■ 该测量采用均方根(RMS)计算法。 �(��''`Ce
AFMAgf{�bD
10. 总结 G�ueqpEd2
■ VirtualLab Fusion 可利用新的光线追迹引擎对复杂光学系统进行分析。 Iupk��+x>�
■ 利用三维光线追迹我们可以对系统进行分析,并对位置等信息进行概览。 �I9>1WT<Yy
■ 此外,系统可以直接利用光线追迹引擎进行分析。 Y�/@4|9!��
■ 可用于评价点列图,也可以附加其他探测器(如光斑尺寸探测器)。 |