| infotek |
2022-04-12 13:34 |
利用参数耦合实现探测器自动定位
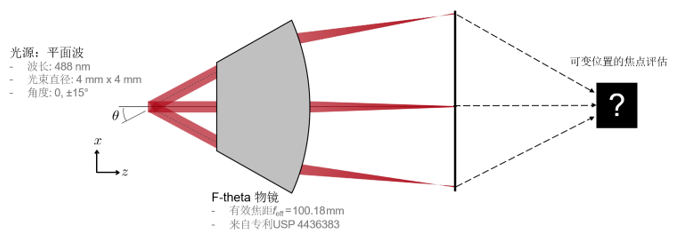
在此示例中,针对特定入射角研究了F-theta物镜的焦点(PSF)。为了避免因离焦照明导致的焦点偏移而引入的额外计算量,根据光的主传播方向来移动探测器位置。使用VirtualLab的参数耦合工具自动调整探测器的位置。 3Xm>�
3��
%WPy��c%I
 :qj7i(���� :qj7i(����
8x-(7[#e<g
建模任务 �v oO7W�"�
qW�S"I+o,S
 cN���M�DI cN���M�DI
�4�'"�WD0�
通过参数耦合自动定位探测器 dEkAU����H
]"'1-�h91�
参数耦合允许用户通过一个小脚本“片段”定义所需系统参数的变化。 ���[#�%@,C
因此,独立输入参数值的任何变化都会同时导致从属(耦合)参数的变化。 _<'?s>(U�'
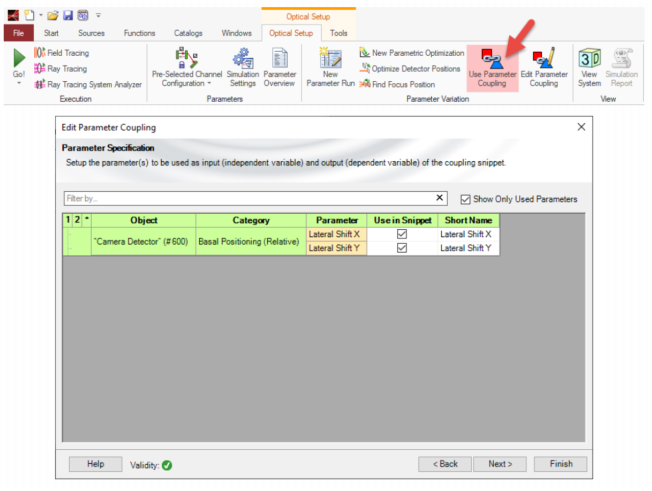
在此示例中,我们将所需检测器的横向位置与主光线的位置重合。 qL5~Wr m-W
,�[��<$X{9
 Y]�!�&, e, Y]�!�&, e,
O*%5P5'p"{
参数耦合过程 GK�[Hs��1/
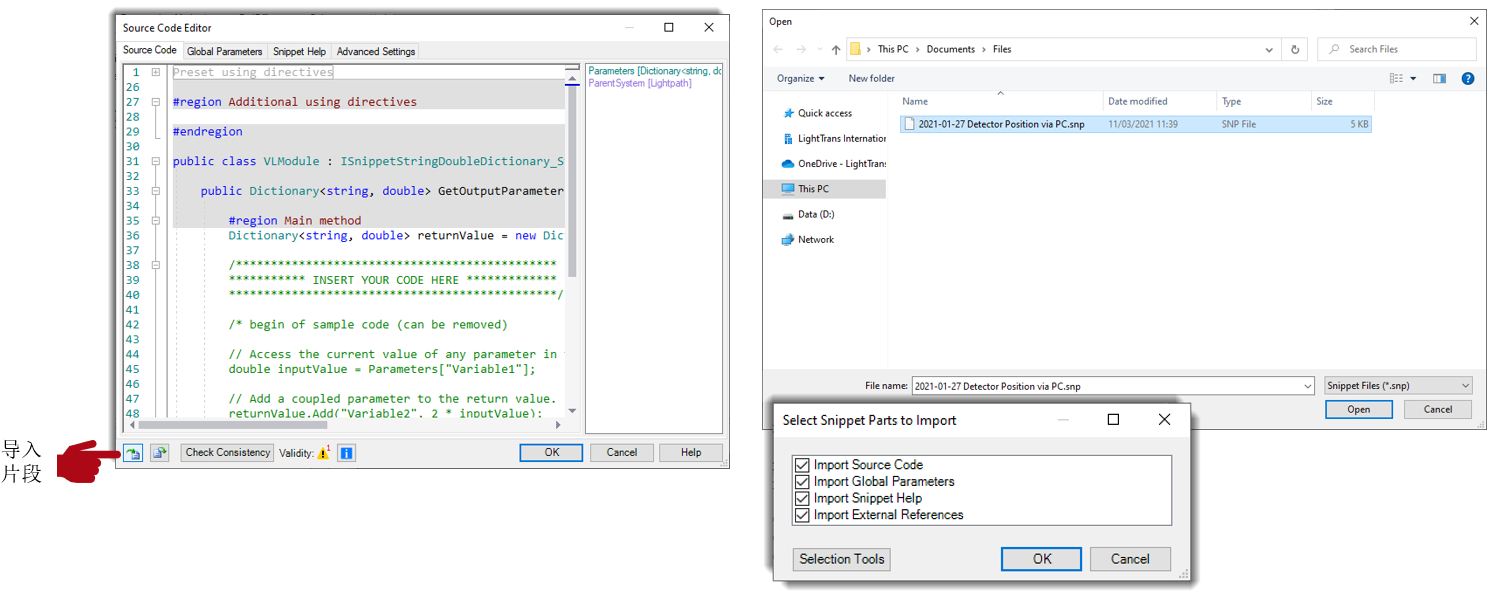
为了找到探测器的适当横向位置,通过应用参数耦合代码段执行附加的光线追迹步骤。可以导入此特定代码段: K^P&3H*(/n
�v6�ei47-�
 `6(Zc"/
\m `6(Zc"/
\m
Rh��%@N.Z*
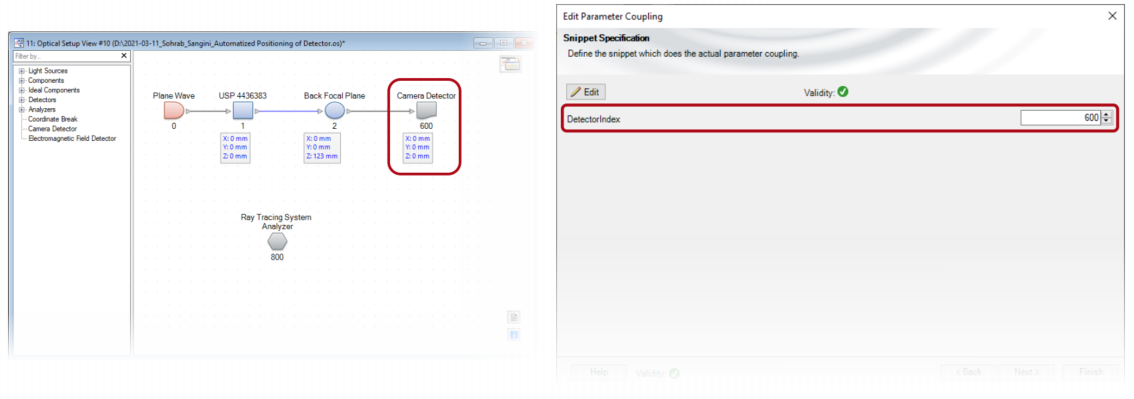
探测器索引选择 ^fE8|/]nG9
:<�HLw.4O�
必须在代码片段的specification选项卡中指定探测器的唯一索引。 z
pDc~eb�h
W��M7L��CP
 ! F�<::�fN ! F�<::�fN
�Ii<k<Bt,�
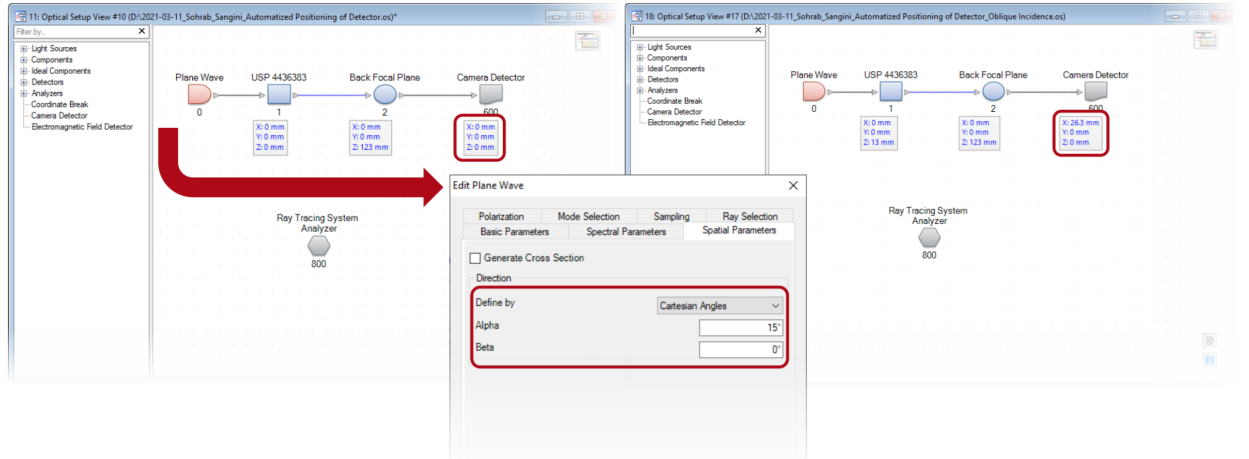
斜入射 &����Z�js�
cPkP�/3I]h
 ib�Lx'��<� ib�Lx'��<�
�sFHq�LG{/
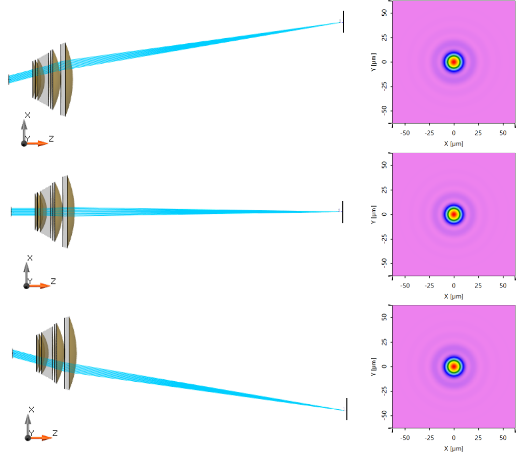
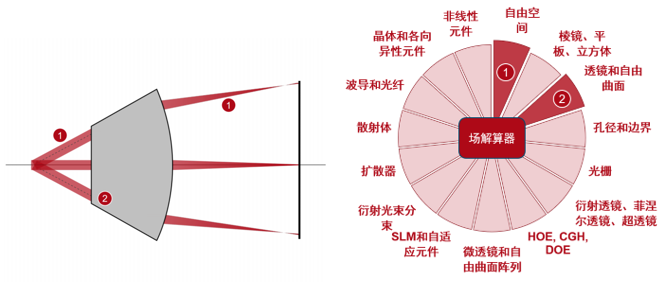
现在,如果改变平面波光源的传播方向,探测器的位置就会自动调整。在此示例中,15°的角度将导致x方向上26.3mm的偏移。 ~[=d{M!$W�
��L�`(\ud�
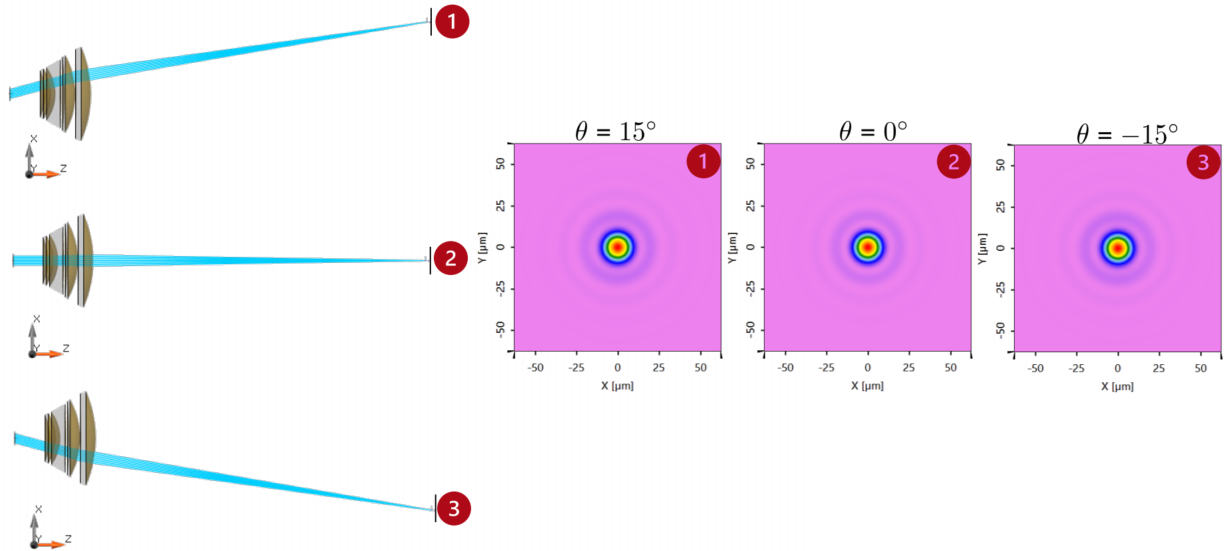
性能评估 - 斜入射 6 X'#F,�M�
�O$N;a9�g
 G��l��"hn� G��l��"hn�
�KGc�!�#�C
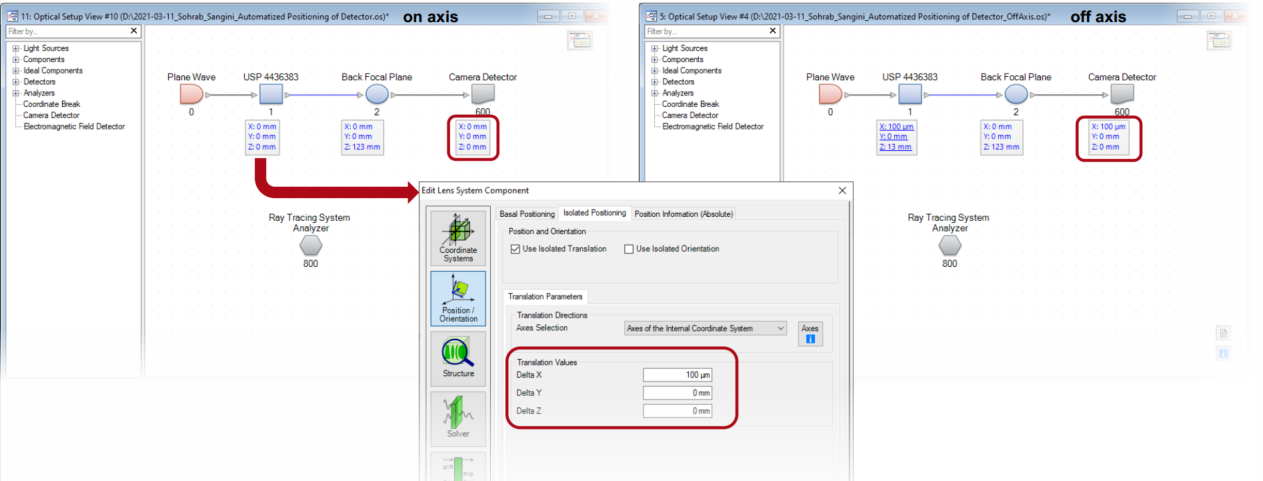
轴上&离轴照明 �z]D���/Qr
eg�H,7f(yP
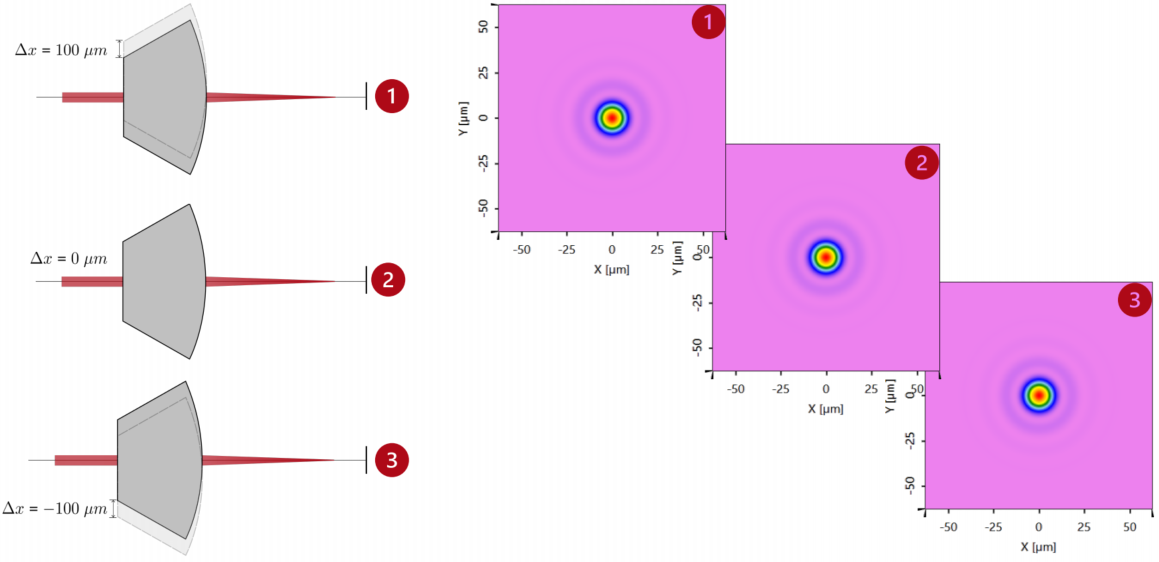
在离轴照明的情况下,探测器的位置也会自动调整。在此示例中,100μm的位移是由参数耦合自动考虑的。 l��bP���n<
5F!i%{XQvm
 _#
cM vl�k _#
cM vl�k
C-g,uARX(r
性能评估 - 离轴照明 Ai��)��>ot
wd3Ou�D�rU
 J���p|eKZ J���p|eKZ
Ti7
@{7>��
VirtualLab Fusion技术 ,5j�3�(L�k
�U.h2� (-p
 K_k'#�j~*? K_k'#�j~*?
�}R��%��*J
文件信息 nM� *}��VI
<~aKwSF[wW
 �&�PMfA�o^ �&�PMfA�o^
i�P�@�FXJJ
延伸阅读 [�X�ubzZ9
- 激光扫描系统的性能分析 aX�*�9T8H/
- VirtualLab Fusion中的参数耦合 p'�6�XF�{�
|
|