| infotek |
2021-08-02 10:24 |
基于SLM光束整形系统中光学系统像差的研究
空间光调制器(SLM.0003 v1.0) j)2I+[a�oB
应用示例简述 �F~8'3!<�9
1. 系统细节 4 ��s��ax�
光源 s(nT7�x�+W
— 高斯激光束 >�v�%js!`f
组件 mUbm3JIjJ�
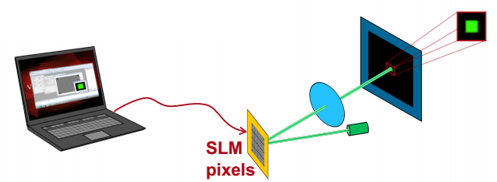
— 反射型空间光调制器组件及后续的2f系统 h7��E~I
J
— 不同的傅里叶透镜设计(球面,非球面) 具有不同的性能和像差 ujRXA�N@mC
探测器 ~L"�$(^��/
— 视觉感知的仿真 m/�1FVC@�*
— 高帽,转换效率,信噪比 8f/KN�h7#s
建模/设计 |)+
S�G�>-
— 场追迹: N(Ru/9!y"
基于不同性能傅里叶透镜的SLM光束整形系统的性能评估。 ~g\�~�x���
�!�+Xul_XG
2. 系统说明 N��^dQX,j
HM��CL��J/
 R7/S SuG6\ R7/S SuG6\
b�!P,�+�!<
3. 建模&设计结果 *^uK=CH1?(
�o�GRk��/@
不同真实傅里叶透镜的结果: cv�aG�[NF
E=N���$�JM
 �K�9lekevB �K�9lekevB
N#K)Z5�J)b
4. 总结 4LK�pEl.=�
基于采用傅里叶光学的SLM光束整形系统的性能研究。 u<Kow�t<ci
r*+~(�8�3k
理想光学系统采用2f系统代替具有透镜像差的真实透镜。 y)fMVD"(��
分析由不同球面和非球面的性对高帽光束质量的影响。 Qds<�j{�2�
bG�CC?�}\�
光束整形应用需要高性能和低像差的光学系统,如非球面系统。 =P�]Z�"�Ok
�.;]W�cC<3
应用示例详细内容 2n��,z`(=
}6@E3z]AMO
系统参数 �E{�<#h9=>
vN'+5*Cgy6
1. 该应用实例的内容 �8YFG*HSa
-Cs( 3[���
,�*�J@ic7"
m�ol,�iM*l
�w'�K7$F51
2. 仿真任务 � y:RW�:D&
8>9Mh!t}(I
在之前的案例中,采用了理想的傅里叶光学系统(2f系统)。在接下来的工作中,使用真实的透镜进行替换,该透镜存在多种光学像差。 gx.\H�3y��
2y
-�
�QH
3. 参数:准直输入光源 �J'}+0�mln
S�=_u3OH0
 1.d�u��#w 1.d�u��#w
>qo!#vJc
a
4. 参数:SLM透射函数 �-qc'J<*^4
&DWSf`:Hx
 ��o8R_�Ojh ��o8R_�Ojh
5. 由理想系统到实际系统 J"C9z{[Z�&
-D~K9u]U_�
���E7L>5�z
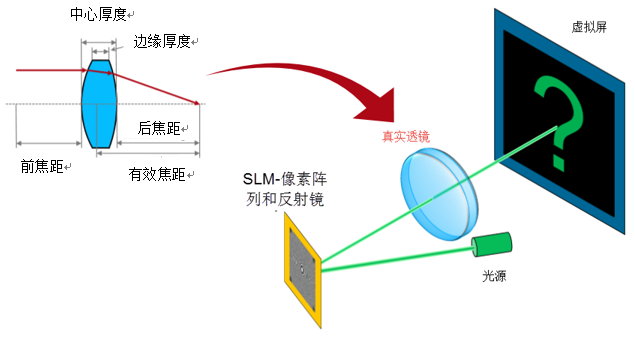
用真实的傅里叶透镜代替理想2f系统。 5@2�Rl>B$
因此会产生像差,像差由所用系统的性能决定。 uO]D�=Z\S(
对于真实透镜系统的描述,需要必要的耦合参数。 �{�Dpsr` &
实际系统可这样选择:有效焦距有2f系统相近。 x4I!�f)8Q�
表格中的参数与之前采用的2f系统理想指标一致。 �p�G#�tMec
 g{V�(Wy�T@ g{V�(Wy�T@
[��P���
&B
 �/x??J4r0� �/x??J4r0�
!�-lI<$S:�
应用示例详细内容 ESCN��/ocV
}|Qh+{H*�.
仿真&结果 M�{J>�yN��
�rRRh-%.RU
1. VirtualLab中SLM的仿真 !, BJO3��&
:�^]Po�$fl
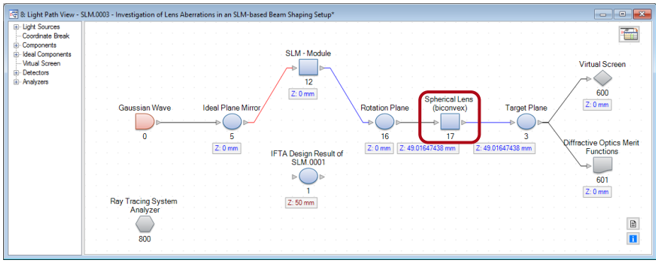
由于可以嵌入组件,VirtualLab可以轻松的实现反射系统(如反射镜,真实透镜等)。 3+Lwtb}XPF
以一个真实的系统(双凸球面透镜)作为傅里叶透镜。 �Qn$'bK2�V
为优化计算加入一个旋转平面 3N_�KN��W�
G3�_7e A#;
ZWCsr�V*;�
=30�35�{�\
2. 参数:双凸球面透镜 t�{]�
6GlW
D,cD�]tB�2
�x�w8k�<`�
首先,使用一个具有相同曲率半径的双凸球面透镜。 h�oF�g�s9�
由于对称形状,前后焦距一致。 g$uiw�qNA%
参数是对应波长532nm。 �-dM�~3�'�
透镜材料N-BK7。 (�2;Aqx5�i
有效焦距可通过VirtualLab中的透镜计算器进行计算。 �:zU4K=kR�
6|EO��B~�|
 XZOBK^,5^B XZOBK^,5^B
>)WE3PT/O"
 �=8���l' [ �=8���l' [
TgcCR:eL=�
3. 结果:双凸球面透镜 �_/:-�-��Z
5S4����Nx>
(f�&�V� 7n
生成的礼帽光束是一个干涉图案的叠加,干涉图案的出现时由于像差造成的。 $*{,�Z<|�2
较低的转换效率(56.8%)和信噪比。 �j0L�%jz��
一个对称双凸系统不能提供合适的传输性能。 791v>h ���
)j8'6tk�)Z
 rPB� Ju0D" rPB� Ju0D"
I�;XM4a��
 ~�~{lIO)&� ~�~{lIO)&�
4. 参数:优化球面透镜 /�uW�UQ#�9
XI��Mh��<
UT@Q�o}�:�
然后,使用一个优化后的球面透镜。 �ikZYc �${
通过优化曲率半径获得最小波像差。 c�^�_+<C-F
优化获得不同曲率半径,因此是一个非对称系统形状。 Tcy9oYh!Pn
透镜材料同样为N-BK7。 A5R"|<U�PR
�\ ER�Bb.�
W���
_[9�
关于使用VirtualLab进行透镜优化的更多信息参考示例BDS.0003 Oyb9
�ql^�
I��du'�+O4
 w8+�phN(-M w8+�phN(-M
�s�1OSuSL>
5. 结果:优化的球面透镜 Wg�f
f+7�k
�s3Bo'hGxG
eF;Jj>\R+i
由于球面像差,再次生成一个干涉图样。 ��s�[�4�qC
转换效率(68.6%)和信噪比一般。 .�\`M�oH��
一个优化的球面系统同样不能提供合适的传输性能。 /\�fR6|tJ
 &�kf \[|y� &�kf \[|y�
 lGet)/w�;c lGet)/w�;c
-w�U�T@�a�
6. 参数:非球面透镜 xRZ K&vkKE
t�G]W!\C'h
xz`0�V}dPl
第三,从Asphericon中选择一个非球面透镜(类型:A25-50LPX)整合到SLM系统。 ��=g�l�G |
非球面透镜材料同样为N-BK7。 �$m)eO8�S+
该透镜从VirtualLab的透镜库中导入。 #}1yBxB�<=
.5HD �i�-�
关于使用VirtualLab进行透镜优化的更多信息参考示例BDS.0003 1�&�h\\&ic
ke6�,&s%{j
tv-S�X=T�
 HZ(giAyj�q HZ(giAyj�q
�&�|IO+'�_
7. 结果:非球面透镜 B�|s�yb!g�
#x;�d��+Q@
��C�^?/9\
生成期望的高帽光束形状。 -R�9��{�Ak
不仅如此,转换效率(90.8%)和信噪比都非常好。 G��=�e'H-�
非球面透镜以几乎零像差将SLM函数转换成高帽光束。 Cf 202pF3y
YPs9P�qk�n
 u$qas��II u$qas��II
 S!-t{Q+j^ S!-t{Q+j^
a�uB+�g'l�
8. 总结 ']!wc8m1"
基于采用傅里叶光学的SLM光束整形系统的性能研究。 1���)u,��%
a�kj#.�aYk
理想光学系统采用2f系统代替具有透镜像差的真实透镜。 a'q&[�0��8
分析由不同球面和非球面的性对高帽光束质量的影响。 \1u^�?c�Bd
"�M�PS&OK�
光束整形应用需要高性能和低像差的光学系统,如非球面系统。 Gp_flGdGQ
$5#DU_�_F/
扩展阅读 �\"I418T K
"6~+��-_:�
扩展阅读 F.�Bij8\��
开始视频 =q�[+�e(,3
- 光路图介绍 ����?J��|�
该应用示例相关文件: ^c}kVQ\�g3
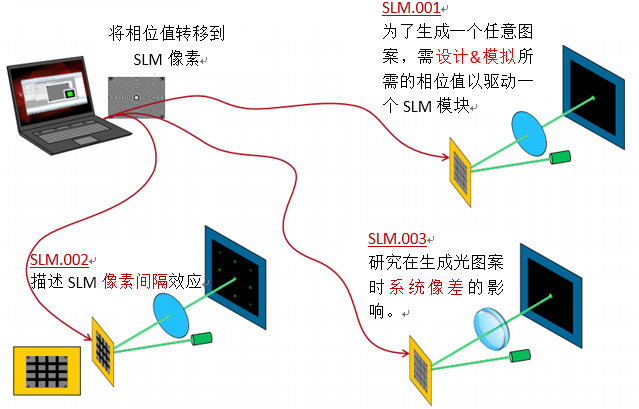
- SLM.0001:用于生成高帽光束的SLM位相调制器设计 PE_JO(e;Xm
- SLM.0002:空间光调制器位像素处光衍射的仿真 x�xgdp. (�
u�n`�4q-S7
U[pR��`u��
QQ:2987619807 B$q5/�L$�}
|
|