| infotek | 2021-04-25 11:40 |
光栅区中的光栅方向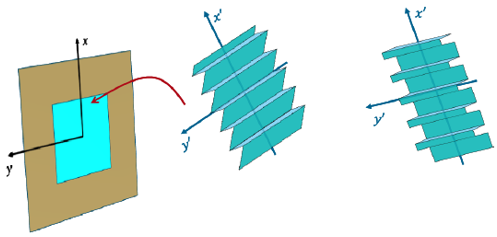 在VirtualLab Fusion中,用户可以在光学表面定义任意区域。光栅界面/堆栈可以添加到这个区域内。为了在区域内简便地定义光栅的方向,可以使用两个角度:“指向(关于z轴旋转)”和“关于y轴旋转180”。这个用例展示了如何设置这两个角度去控制某个区域内光栅的方向。目前仅在Waveguide工具箱中支持光栅区域的设置。 建模任务 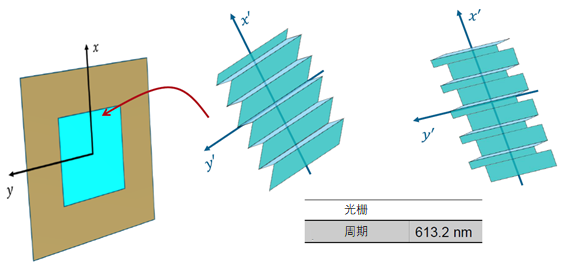 在一个表面的光栅区域中定义光栅方向,使用了“ ─ 指向(关于z轴旋转),使用锯齿光栅说明。 ─ 关于y轴旋转180,使用矩形光栅说明。 示例 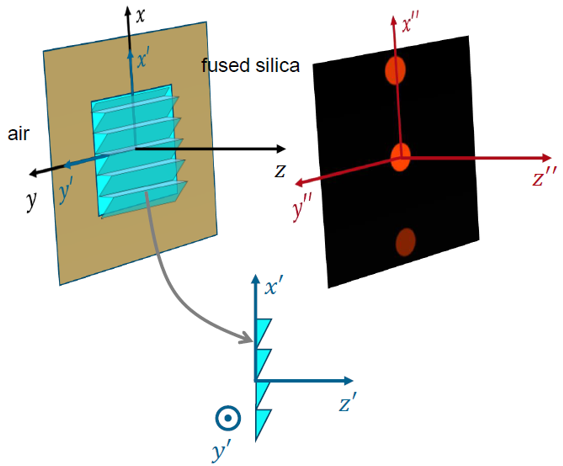 通过设置光栅和界面的坐标系的关系,可以定义界面上的光栅方向。 ─ 蓝色坐标系代表光栅坐标系,黑色坐标系代表界面坐标系。 ─ 通过设置指向(关于z轴旋转)(Orientation (Rotation about z-Axis))和关于y轴旋转180(Rotation about y-Axis by 180),在界面坐标系中,光栅坐标系进行了旋转。 ─ 我们还将在远离光栅的探测器平面中显示衍射阶数,以给出光栅方向。 关于z轴旋转的图示 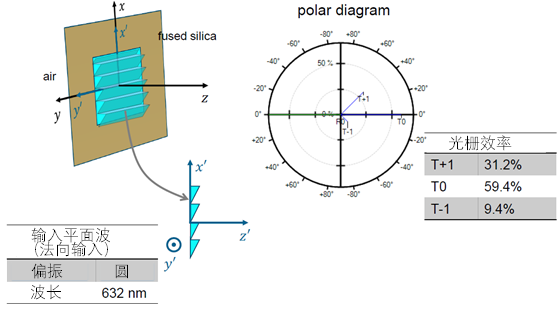 使用锯齿光栅说明指向(关于z轴旋转)(Orientation (Rotation about z-Axis))。 光栅关于y轴是非对称的,所以+1st和-1st阶的衍射效率并不是对称的。所以,我们可以很容易地从检测到的衍射阶数看到光栅旋转引起的效果。 指向(关于z轴旋转):0° 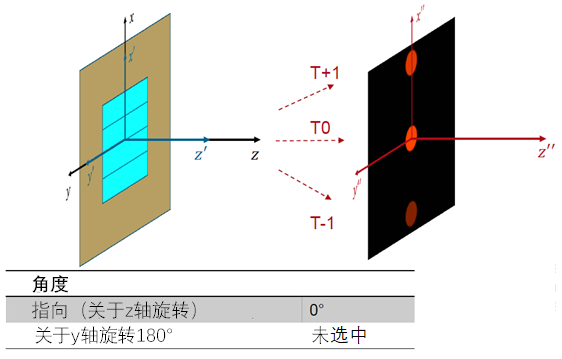 注意:默认坐标系的所有基本矢量(x,y,z矢量)完全相同。 指向(关于z轴旋转): 30° 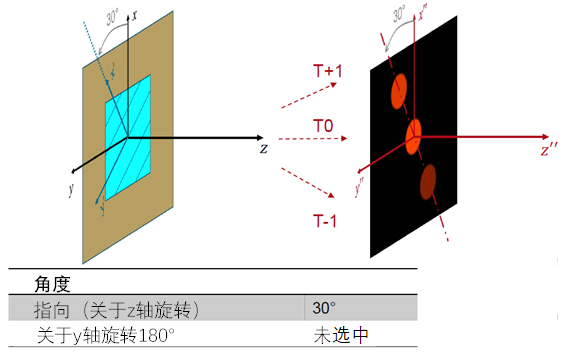 注意:方向角度的定义为: ─ 关于界面坐标轴。 ─ 逆时针方向。 指向(关于z轴旋转): -90° 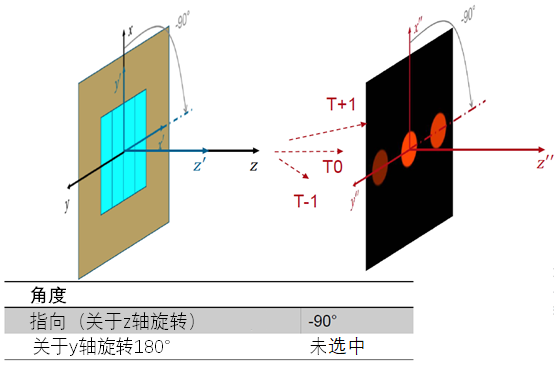 注意:方向角度非常灵活,可以根据用户偏好定义为从-360到360任意值。 关于y轴旋转180°示例 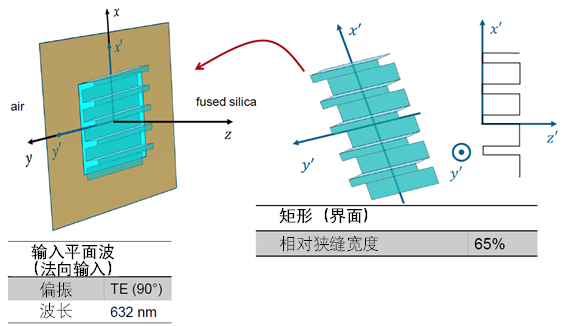 使用矩形光栅界面(注意光栅堆栈也可以放在界面上)说明关于y轴旋转180(Rotation about y-Axis by 180)。当相对狭缝占宽不是50%,界面两侧介质固定时,旋转前和旋转后给出了两种不同的光栅堆栈,这导致了衍射效率的不同分布。 关于y轴旋转180°(未选中) 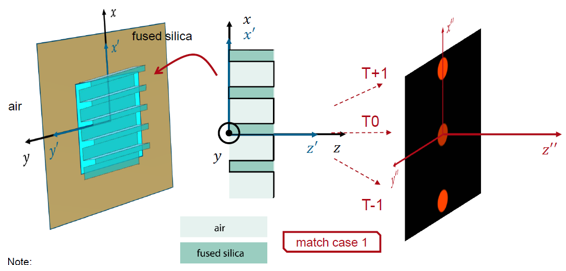 注意: 默认时,为了保持光栅坐标系和界面坐标系的重叠,光栅添加到光学界面的右侧(z轴和z‘轴相同)。 坐标系定义与光栅工具箱中稍有不同,因为在光栅工具箱中: ─ 如果光栅界面加在衬底的第一层界面,其z轴和x轴与平面界面的方向完全相反。 ─ 如果光栅界面加在衬底的第二层界面,坐标系完全相同,但与此处相比(假设衬底是二氧化硅)第二个界面前后的材料相反。 关于y轴旋转180(选中) 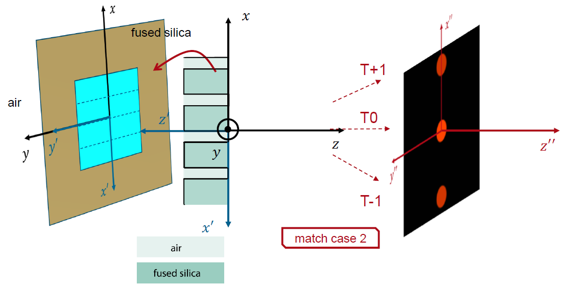 注意: 矩形光栅界面关于光学界面的y轴旋转180,所以看到光栅接口两侧的材料都切换了,所以光栅堆栈变成了例2. 例1和例2的附加信息 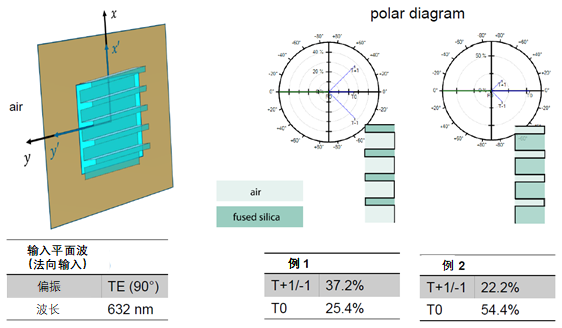 文档信息  QQ:2987619807 |
|